鱼雷小角度入水过程仿真
2014-02-27 06:30程文鑫蔡卫军杨春武
水下无人系统学报 2014年3期
程文鑫, 蔡卫军, 杨春武
鱼雷小角度入水过程仿真
程文鑫1, 蔡卫军2, 杨春武2
(1 海军装备部, 北京, 100073; 2 中国船舶重工集团公司 第705研究所, 陕西 西安, 710075)
针对鱼雷小角度入水问题, 采用多相流混合模型及动网格方法, 分析了鱼雷在小入水角条件下的入水空泡形成过程, 以及雷体外形与入水空泡壁的相互作用特点, 获得了不同入水角、入水攻角条件下俯仰力矩及力矩作用点位置在入水过程中的变化规律。仿真结果表明, 减小入水攻角、延迟动力点火将有助于避免发动机失速、鱼雷跳水等异常现象, 采用泵喷射推进器有利于鱼雷入水过程的稳定。
鱼雷; 空泡; 动网格; 多相流混合模型; 泵喷射推进器
1 概述
实际海况条件下, 发射平台的大幅度摇摆可能会导致鱼雷发射出管后以小角度入水, 出现鱼雷跳水、发电机失速、鱼雷下潜缓慢等异常情况。与垂直入水过程不同[1], 鱼雷小角度入水空泡有明显的非对称特征, 雷体受力及姿态变化更易受到入水空泡形态的影响。
由于入水过程的瞬变性, 采用试验手段仅能获得典型状态下的入水空泡形态, 难以得到较全面的雷体受力变化规律。针对鱼雷入水问题的分析手段目前主要有以下几种[1-3]。
1) 引入奇异边界条件后, 可获得轴对称头型垂直入水过程的工程解析解。
2) 采用Mackey方法可获得雷体与空泡壁相互作用形成的鱼雷流体动力, 对鱼雷带空泡航行时的入水弹道进行仿真。该方法需预先将空泡外形拟合为空泡椭球模型, 适用于轴对称入水空泡问题分析[4-5]。
3) 采用Logvinovich空泡截面独立扩张原理[6-8], 可获得细长体超空泡外形以及带空泡航行时的航行体滑行力特性。该方法考虑了重力对空泡形态的影响, 多用于分析小空泡数下超空泡航行体的稳定控制。
4) 采用基于流体体积函数(volume of fluid, VOF)的多相流混合模型和动网格方法[9], 可对鱼雷入水过程进行动态数值仿真, 从而获得入水空泡与雷体相互干涉过程、雷体流体动力参数的变化规律。
上述方法多用于研究鱼雷垂直入水问题, 重点关注入水空泡的早期阶段, 通常仅需考虑两相介质(水与空泡、水与空气)。为了合理研究鱼雷小角度入水空泡对雷体姿态及受力特性影响, 更应考虑雷体与水、空气及空泡三相介质的相互作用。
本文借鉴通气超空泡流场求解思路[10], 采用均质多相流模型及动网格方法, 通过求解3D RANS方程及zward空化模型, 研究小入水角条件下的入水空泡形成过程, 分析雷体外形与入水空泡壁的相互作用特点。并根据入水过程中雷体受力变化规律, 提出鱼雷小角度入水条件下改善下潜速度、避免跳水及发电机失速的可能措施。
2 数学模型
2.1 多相流模型
鱼雷入水过程涉及空气、水、水蒸汽三相介质, 多相流相间质量传输方程
2.2 动网格方法
鱼雷出管至入水迭代求解过程中, 雷体姿态、位置实时变化, 采用局部弹簧网格重构方法, 根据网格单元压力梯度进行局部网格的加密或聚合。通过调整拉伸及扭转弹簧的倔强系数实现计算域网格单元光顺处理, 避免雷头触水及入水空泡附着时出现网格畸变。
3 算例
假设鱼雷入水速度为50 m/s, 质量为290 kg, 转动惯量为210 kg×m2, 质心距雷头1.3 m, 入水攻角分别为19°, 21°, 24°, 入水俯仰角分别为3°, 0°, –5°, –20°, 雷体坐标系原点在鱼雷质心[11]。
3.1 入水空泡形成过程
鱼雷入水过程包括雷头撞水、雷体侵水、雷尾触水等阶段。入水初期, 雷头下侧局部压力降低, 形成开式空泡。有入水攻角时, 入水空泡呈现纵向非轴对称形态(见图1)。随着雷体、雷尾鳍舵相继触水, 空泡壁附着在雷体表面, 雷体受到的阻尼力矩增大, 鱼雷姿态变化趋于平缓(见图2)。
图1 鱼雷入水空泡形成过程
图2 雷头及雷尾触水过程
入水角为正时, 雷尾鳍舵、推进器先触水, 雷体受到有利于鱼雷下潜的俯仰力矩(见图3), 但鱼雷下潜过程中推进器距离水面更近, 推进器桨叶空化后易造成发电机失速。采用延迟动力点火或启控措施, 引入鱼雷深度判断条件后可避免发电机失速。

图3 入水角对空泡形态的影响
3.2 雷尾构型与入水空泡
雷尾鳍舵刺穿空泡壁面后, 将形成有利于鱼雷下潜的俯仰力矩(见图4)。小入水角时, 由于入水空泡的纵向非轴对称性, 被空泡包裹的尾舵舵效近似为0, 进行操舵动作时, 应避免计入该舵舵效。入水角增大后, 刺穿空泡壁的尾舵有一侧表面仍可能处于空泡中, 此时操舵后的实际舵效远低于鱼雷稳定直航状态。增大俯仰通道功能舵角限幅, 能够加速入水空泡溃没, 从而提高俯仰功能舵效, 加快鱼雷下潜。
雷尾采用泵喷射推进器时, 导管触水后将产生有利于鱼雷下潜的俯仰力矩, 但泵喷射推进器进流易受入水空泡影响。采取延迟动力点火或启控措施, 推进器可避开入水空泡段后再工作, 从而避免发电机失速。
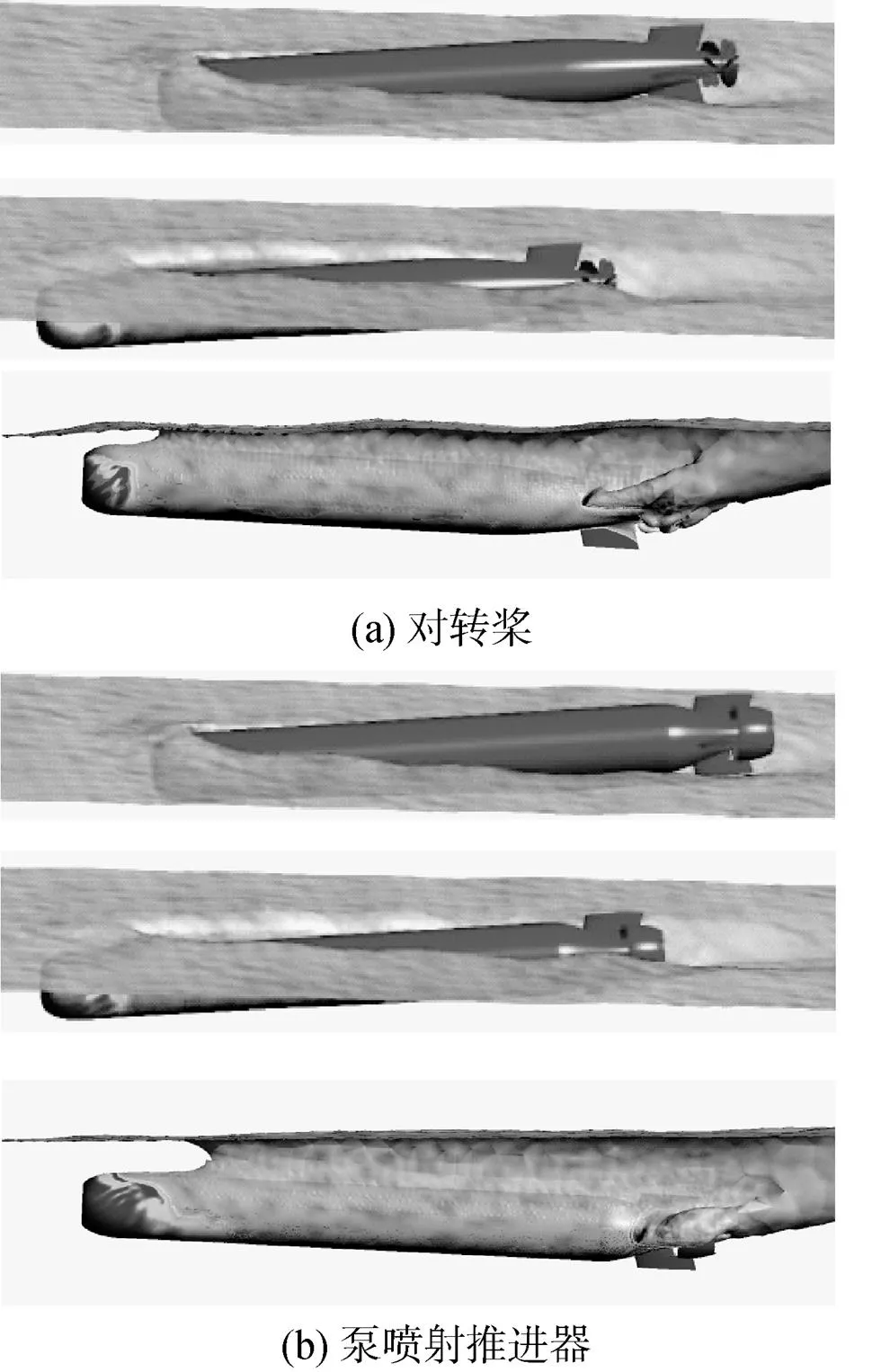
图4 雷尾构型与入水空泡的相互作用
3.3 入水角、入水攻角影响
入水攻角增大后, 雷体受到的俯仰力矩增加较快。减小入水攻角, 雷体俯仰力矩在入水过程中变化幅度小, 且雷体受力作用点向雷头方向移动(见图5)。因此减小入水攻角、调整鱼雷重心向雷头方向移动, 均有利于减小入水俯仰力矩。
鱼雷小角度入水过程中, 雷体轴向阻力在雷体侵水阶段变化较小, 因此适当延迟动力点火时间对俯仰功能舵效影响小, 不会减缓鱼雷下潜速度(见图6)。
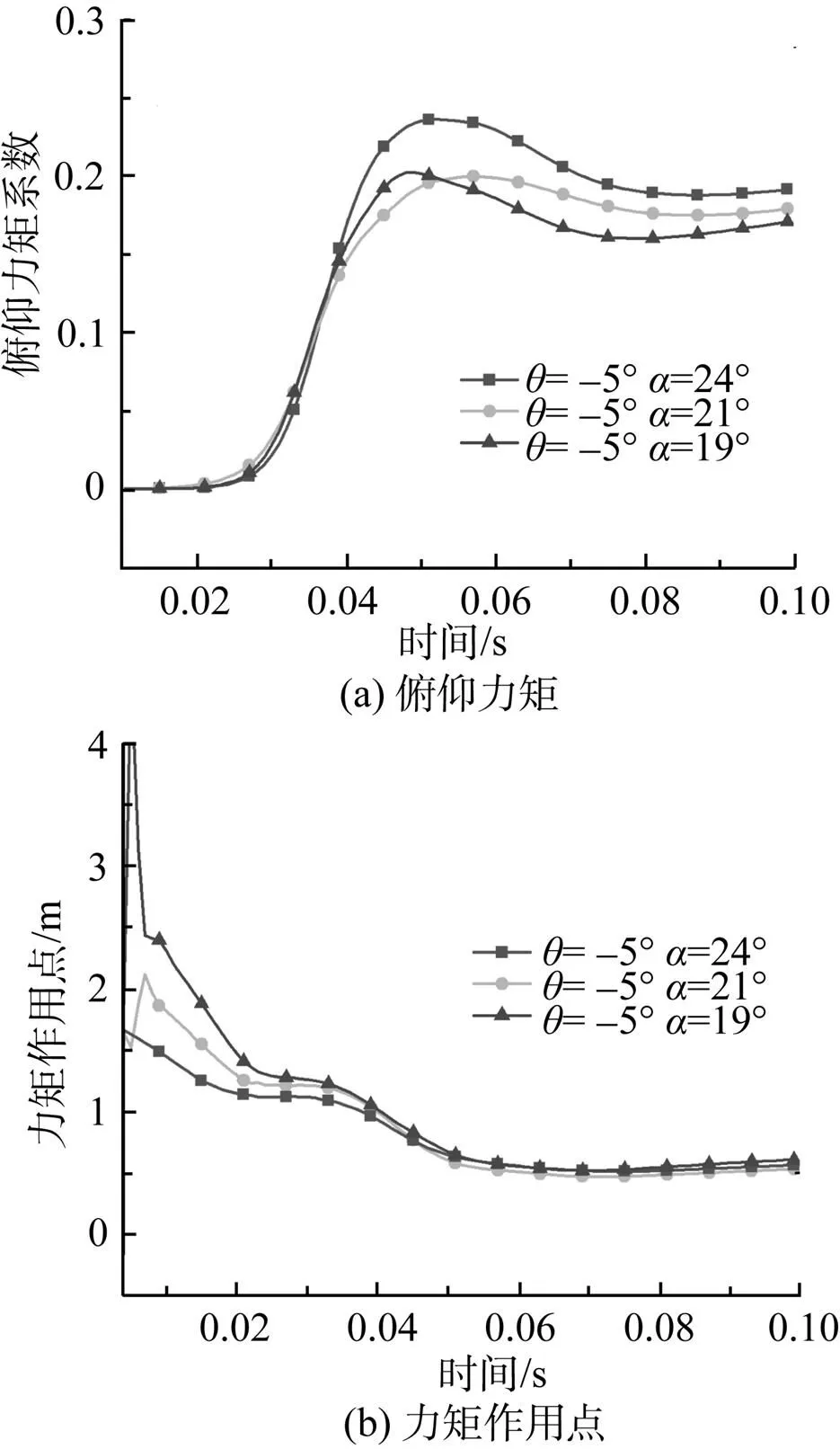
图5 入水攻角对俯仰力矩及力矩作用点位置的影响
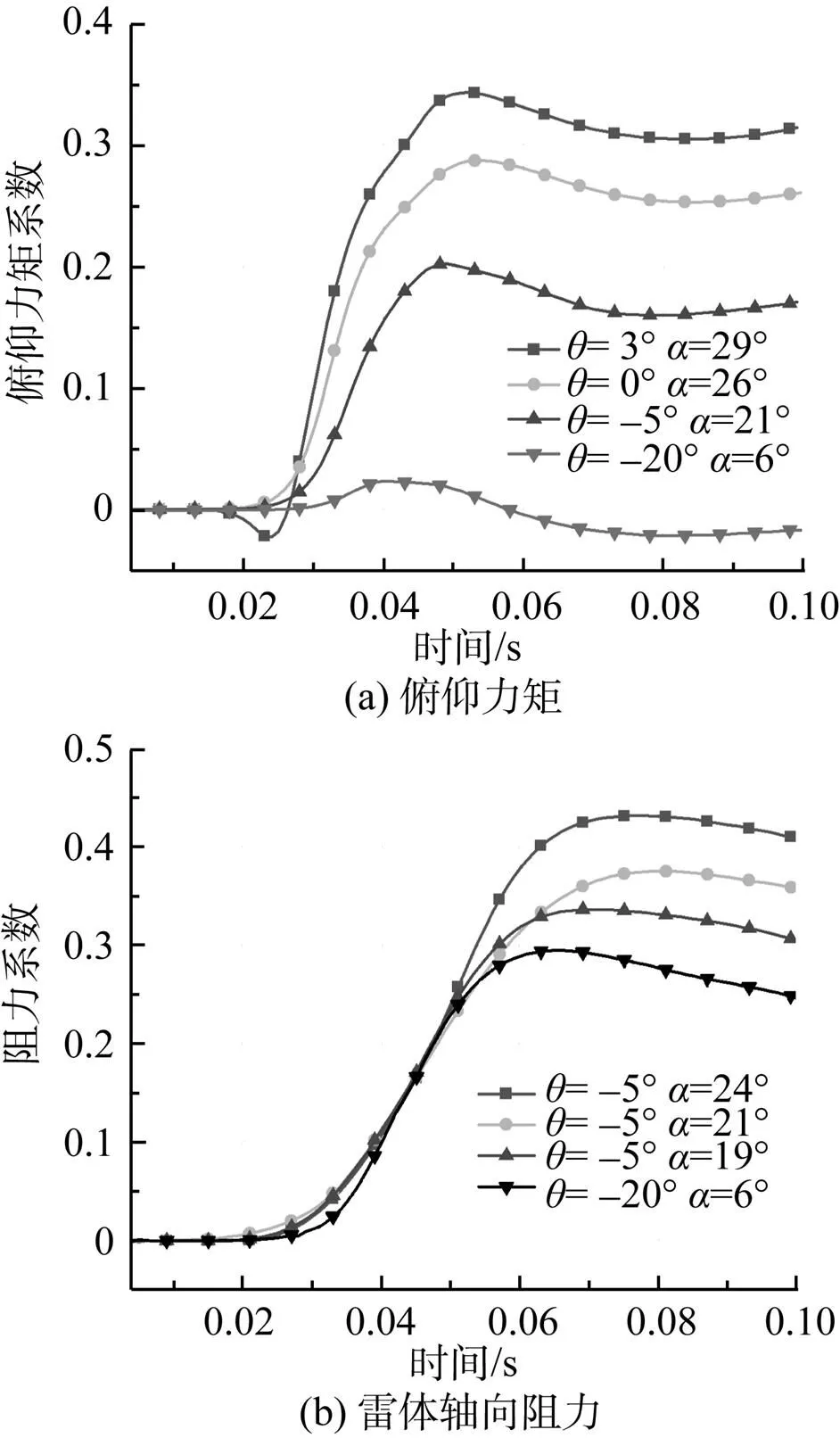
图6 入水角、入水攻角对俯仰力矩及雷体轴向阻力的影响
4 结论
本文采用多相流混合模型及动网格方法,获得小入水角条件下入水空泡壁与雷体的相互作用过程、入水过程中的雷体受力特性, 提出小角度条件下避免鱼雷入水异常的可能措施。
1) 鱼雷小角度入水时, 至少有1个舵被入水空泡包裹, 设计操舵规律时应避免计入该舵舵效。
2) 减小鱼雷入水攻角、延迟动力点火, 有利于避免鱼雷发电机失速或鱼雷跳水。
3) 雷尾采用泵喷射推进器有利于鱼雷入水过程稳定。
[1] 王永虎, 石秀华. 入水冲击问题研究的现状与进展[J]. 爆炸与冲击, 2008, 28(3): 276-282. Wang Yong-hu, Shi Xiu-hua. Review on Research and Development of Water-entry Impact Problem[J]. Explo- sion and Shock Waves, 2008, 28(3): 276-282.
[2] Putilin S I. Some Features of Dynamics of Super- cavitating Models[J]. Applied Hydromechanics, 2000, 2 (74): 65-74.
[3] 李体方, 张志峰. 海浪作用下的水下弹道数学模型[J]. 弹道学报, 1999, 11(3): 47-51. Li Ti-fang, Zhang Zhi-feng. The Emulation Development for the Motion of Submerging Missile under Wave Force [J]. Journal of Ballistics, 1999, 11(3): 47-51.
[4] 颜开, 史淦君, 薛晓中, 等.用Mackey方法计算鱼雷带空泡航行时的入水弹道[J].弹道学报,1998,10(2): 93- 96. Yan Kai, Shi Gan-jun, Xue Xiao-zhong, et al. The Water Entry Trajectory Calculation of a Torpedo with Cavity by Use of Machey Method[J]. Journal of Ballistics, 1998, 10(2): 93-96.
[5] 顾建农, 张志宏, 范武杰, 等. 旋转弹体入水弹道计算方法[J]. 海军工程大学学报, 2001, 13(4): 1-7, 13.
Gu Jian-nong, Zhang Zhi-hong, Fan Wu-jie, et al. The Hydroballistic Calculation Method for the Water Entry of a Rotary Projectile[J]. Journal of Naval University of Engineering, 2001, 13(4): 1-7, 13.
[6] 安伟光, 蒋运华, 安海. 运动体高速入水非定常过程研究[J]. 工程力学, 2011, 28(3): 251-256. An Wei-guang, Jiang Yun-hua, An Hai. The Unsteady Water Entry Process Study of High-speed Vehicle[J]. En- gineering Mechanics, 2011, 28(3): 251-256.
[7] 王京华, 魏英杰, 黄文虎, 等. 水下超空泡航行体非线性动力学建模与仿真[J]. 工程力学, 2011, 28(12): 183- 189. Wang Jing-hua, Wei Ying-jie, Huang Wen-hu, et al. Nonlinear Dynamic Modeling and Simulation of an Underwater Supercavitating Vehicle[J]. Engineering Me- chanics, 2011, 28(12): 183-189.
[8] 冯光, 颜开. 超空泡航行体水下弹道的数值计算[J]. 船舶力学, 2005, 9(2): 1-8. Feng Guang, Yan Kai. Numerical Calculation of Under- water Trajectory of Supercavitating Bodies [J]. Journal of Ship Mechanics, 2005, 9(2): 1-8.
[9] 何春涛, 王聪, 闵景新, 等. 回转体均匀垂直入水早期空泡数值模拟研究[J]. 工程力学, 2012, 29(4): 237-243. He Chun-tao, Wang Cong, Min Jing-xin, et al. Numeri- cal Simulation of Early Air-cavity of Cylinder Cone with Vertical Water-entry[J]. Engineering Mechanics, 2012, 29 (4): 237-243.
[10] Zhou J J, Dong C P, Qian J P. Evaluation on the Application of Two-fluid Multiphase Model to Super- cavity[J]. Applied Mechanics and Materials, 2013, 275 (227): 417-428.
[11] 严卫生. 鱼雷航行力学[M]. 西安: 西北工业大学出版社, 2005.
(责任编辑: 陈 曦)
Simulation on Small-Angle Water Entry Process of Torpedo
CHENG Wen-xin, CAI Wei-jun, YANG Chun-wu
(1. Naval Armament Department, Beijing 100073, China; 2. The 705 Research Institute, China Shipbuilding Industry Corporation, Xi′an 710075, China)
The multiphase mixture model and the dynamic mesh method are used to analyze the forming process of cavity in torpedo water entry with small angle, and the characteristics of interaction between torpedo shape and water entry cavity wall to achieve the change rules of pitch torque and torque action point for different water entry angle and water entry angle of attack. Simulations show that reducing angle of attack or delaying ignition can avoid such abnormal phenomena as engine′s stalling and torpedo′s broaching, and pump jet configuration facilitates stable water entry process of a torpedo.
torpedo; cavity; dynamic mesh; multiphase mixture model; pump jet propellant
TJ630
A
1673-1948(2014)03-0161-04
2014-01-23;
2014-02-26.
程文鑫(1977-), 男, 工程师, 博士, 研究方向为装备系统综合保障设计、分析与评价.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
上海交通大学学报(2021年8期)2021-09-02
数字海洋与水下攻防(2021年2期)2021-05-08
舰船科学技术(2021年12期)2021-03-29
宇航总体技术(2019年5期)2019-10-11
当代陕西(2018年12期)2018-08-04
火力与指挥控制(2017年11期)2017-12-19
舰船科学技术(2017年11期)2017-11-27
北京航空航天大学学报(2017年7期)2017-11-24
科技创新导报(2016年31期)2017-03-30