基于穿梭式母车运动学模型的matlab仿真分析
2014-02-18 09:29鲁春强金跃跃
物流技术 2014年11期
鲁春强,金跃跃
(南京音飞储存设备股份有限公司,江苏 南京 211102)
1 引言
在仓储领域越来越追求存储密度和存储效率的今天,以堆垛机为核心的自动化立体仓库越来越难以满足客户的需求。尤其是以堆垛机为核心的自动化立体仓库一旦建成后,存储的效率就已经被固定,当客户的需求有增长时,现有的配置就难以有所提升,因此就需要一套新的、不同于现有的自动化系统来满足需求。这种自动化系统应具有存储率高,设备单元模块化,随时可以根据客户的需求提升或降低效率。
穿梭式子母车系统就是一套新的密集仓储系统。它将原有堆垛机的三轴运动分解为X向的穿梭式母车、Y向的穿梭板车、Z 轴的提升机三个单元设备,通过不同设备的组合进行货物的存储动作。穿梭式子母车系统实际上是一套包括穿梭板车、穿梭式母车、托盘升降机、母车升降机、托盘输送机、巷道货架、仓储控制系统(WCS)、仓库管理系统(WMS)等单元组成的自动化密集式仓储系统。
由于各单一设备的单元化,因此穿梭式子母车系统的效率是设备综合的整体效率,考量系统的效率不再仅仅是考察单一设备的速度,更需要考察系统的综合能力。但各单一设备的速度依然是非常重要的参考指数,如同好的零件不一定能做出好的汽车,但坏的零件一定做不出好的汽车一样。因此研究各单一设备的速度控制曲线就成为一个非常重要的课题。笔者将之前研究的V=f(S)应用于母车的控制中,并引入了跃度参数的概念,从而完善整套V=f(S)的理论;本文主要阐释了母车控制曲线的优化研究,并结合控制曲线的仿真从而优化母车设计中的电机选型问题。
2 运动学模型
穿梭式母车等单一设备在运动过程中速度的基本曲线如图1所示。
图1a)中启停曲线采用恒加速度的方式,b)采用变加速度的方式。两种方式各有利弊,a)的好处是速度提升快,但运动时由于惯性容易出现货物相对车体的相对移动,需要更多的调试动作以避免相对移动的发生;b)的优点是能有效地避免a)的缺点,但由于加速度从0开始提升到最大加速度后再转变为0,相对于a)加速的时间会有所延长。
另外从图1也可以看出a)是b)的一种特例,因此实际设计中仅需要考虑b)模型即可。
根据功率的定义:功率是单位时间内所做的功,因此电机选型时的功率P 就是与载重m,加速度a,速度v 有关的函数,即:

运动过程中常用的几个物理量是速度v,加速度a,时间t,位移s,微积分方程如下:

为了降低启动瞬间对母车自身冲击,避免货物偏移,笔者在曲线研究中引进了跃度的概念。跃度,即加速度的变化率,或者又称加加速度;
关于跃度的资料,网上介绍的较少,而在工程中却有大量应用。例如:在电梯速度设计中,即使乘客安全能够保障,如果跃度不合适,仍会使舒适体验不佳,此时需要考虑震动引起的跃度变化。实验数据表明:对于汽车来讲,人体目前能承受的跃度范围是0.4-1m·s-3,在铁路设计中一般跃度的取值范围为0.3-0.5m·s-3。
在启停的过程中,由于加速度、位移、速度和跃度的变化,功率也会发生相应的变化,因此在母车的设计中,瞬时功率实际上更有意义。瞬时功率的公式如下:

式中:
Pw-瞬时功率;
W-机械做功;
m-质量;
a-加速度;
s-位移;
v-速度;
从式(4)可知,瞬时功率是关于质量、速度、加速度的函数。
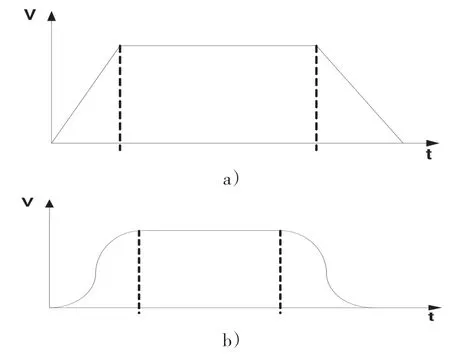
图1 运动基本控制曲线
3 模型仿真
核心计算模块的数学模型笔者在文献[2]中有所阐述,在此不做赘述。另外在实际的应用中首次采用了三角函数作为母车的控制曲线,因为三角函数的图形实际上是比较符合S曲线,而且在控制上更容易实现。本例的核心函数如下:

依据上述的函数模型,设定最大加速度amax和最大速度vmax,同时给出载重及自重m,就可以利用matlab进行仿真。
MATLAB 是matrix 和laboratory 两个词的组合,意为矩阵工厂(矩阵实验室),是由美国mathworks公司发布的主要面对科学计算、可视化以及交互式程序设计的高科技计算环境,它将数值分析、矩阵计算、科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学研究、工程设计以及必须进行有效数值计算的众多科学领域提供了一种全面的解决方案,并在很大程度上摆脱了传统非交互式程序设计语言(如C、Fortran)的编辑模式,代表了当今国际科学计算软件的先进水平。
本例的模型基础为加速度为amax=1m/s2,最大速度vmax=2m/s,质量为mmax=2 000kg。用matlab进行仿真,效果如图2、图3所示。
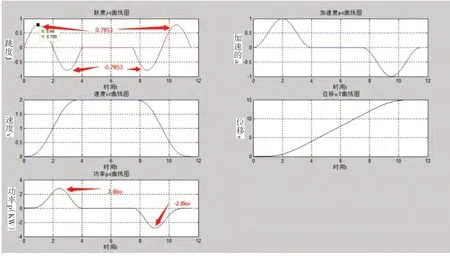
图2 满载运动时间控制曲线

图3 空载运动时间控制曲线

图4 未达到最大速度时运动时间控制曲线

图5 运动位移控制曲线
可以看出:五个变量都是比较平滑的曲线,这种控制方法几乎对电机没有冲击,而只要控制好跃度的范围就可以降低本体的摆动和货物偏移问题。
当目标位移由于无法达到最大速度时控制依然遵循类似功能,不同的是速度有所降低,行走的图形如图4所示。
为了消除时间参变量,建立母车自适应的V=f(s),笔者需要将原有公式做相应的变通,以完成母车自适应曲线模型。具体的基础函数如下:
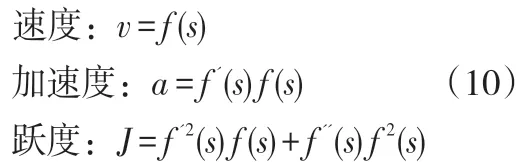
基于上述公式进行仿真的结果如图5所示。从图5可以看出,加速度在运行很短的距离内就可以达到最大,其实际的意义在于可以利用此方式使电机的控制不再受限于变频器的启停曲线,对于系统的可控性更有好处。
4 结论
笔者通过matlab仿真软件,对V=f(s)曲线进行了修正优化,并通过引进跃度和三角函数使得母车控制曲线的仿真模型更接近于连续。在笔者看来,控制曲线的好与坏没有一个绝对的概念,要结合机械结构、电机、变频器、制动电阻等硬件综合考虑;但无论如何,对电机和机械本体冲击最小的控制曲线相对是比较合理的。
[1]鲁春强.基于堆垛机行走速度自适应参数模型的算法研究[J].物流技术,2012,(12).
[2]鲁春强.基于Visual Basic 开发的堆垛机三轴速度位移模型研究[J].物流技术,2013,(7).
[3]鲁春强.基于S型曲线运动的堆垛机效率分析模型的建立[J].物流技术,2014,(1).
[4]张华宇,王孚懋,徐方全.S 形曲线加减速算法的研究[J].现代制造技术与装备,2006,(2).
[5]顾海强,阮毅,李武君.通用变频器加减速方式的研究与实现[J].电机与控制应用,2007,(12).
[6]彭建怀.PLC实现S曲线的方法[Z].武汉:湖北三环发展股份有限公司研发中心,2009.
猜你喜欢
当代水产(2022年6期)2022-06-29
物流技术与应用(2021年11期)2021-12-27
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
汽车观察(2018年12期)2018-12-26
制造业自动化(2018年10期)2018-11-02
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
能源(2016年2期)2016-12-01