
一种互相关水下地形匹配导航算法*
2014-02-13 05:43:48赵建虎
大地测量与地球动力学 2014年1期
张 凯 赵建虎 陈 卓
1)武汉大学测绘学院,武汉 430079
2)中兵勘察设计研究院,北京100053
1 引言
水下地形匹配导航作为惯性导航(INS)的一种重要辅助手段,以其无积累、自主性和隐蔽性强等特点备受关注[1-7]。目前,水下地形匹配的常用方法为基于贝叶斯方法的连续滤波估计[8-10],然而,这些算法各有其局限性。点群滤波对计算处理单元的要求较高,尤其是当参数估计的维度从二维增加到三维时,其计算负担重。以此相反,粒子滤波由于其原理特性,适用于高维度的贝叶斯连续估计,但为了保证计算精度和防止样本贫化,也产生了计算速度和滤波性能之间的矛盾。与此相反,基于等值线的互相关地形匹配则不存在上述问题,且具有不受深度方向系统误差影响的优点。但是该方法容易受到误匹配结果的影响,从而影响连续定位的精度和稳定性。为此,本文给出了一种互相关水下地形匹配导航算法,以期提高匹配导航解的可靠性。
2 水下地形导航原理
水下地形导航系统的状态方程和量测方程可分别表示为:
其中水下载体的位置状态向量通常表示为

式中ut代表由在不同水下地形匹配观测历元中INS所提供的状态改变量,rt是由INS 漂移率和历元间航行距离所决定的传播过程噪声,服从正态分布N(0,Qt),其中Qt为传播噪声水平。与此相对,地形匹配导航的测量更新过程则由式(2)描述。在式(2)中,yt表示由声呐系统在当前实际位置获取的水下地形测量值,h(xt)则代表当前位置估值xt在地形模型h(·)中所对应的水深值,et表示yt的测量噪声,服从正态分布N(0,σe)2。在导航过程中,et由声呐系统中的测量噪声和地形模型噪声两部分组成。
基于声呐系统测量噪声和地形模型噪声相互独立,以及声呐系统各波束之间测量噪声相互独立的前提,载体基于当前位置所获取的地形测量值的概率密度函数为:
式中N 代表声呐系统的测量波束数。

通常,由于式(2)为非线性方程,因此需要使用基于贝叶斯估计的方法如点群滤波和粒子滤波等方法来进行连续导航。然而,当互相关匹配中波束观测值的数量N 很大时,其匹配结果呈现出高斯分布的形态,收敛于高斯分布N(0,R),

此时,将量测方程(2)重新定义为:

式中,zt为互相关匹配结果,wt为匹配误差,由式(7)给出。基于

的Kalman 滤波方程为:

3 基于等值线互相关水下地形匹配
该导航方法基于水深测量值中的测量噪声为高斯白噪声。然而,受潮位变化等因素影响,水深测量值中的噪声常常出现系统误差,其幅度随时间而变化,并影响水下地形匹配导航解的精度,还常常导致滤波发散。为此使用基于等值线的地形匹配方法来消除深度方向上的系统误差,即在地形匹配的过程中,同时将测量数据和每批待匹配区域数据同时减去各自的均值,然后进行互相关匹配。基于等值线的地形匹配方法可有效消除测深数据中系统偏差的影响,然而由于算法求差过程中消去了绝对水深信息,匹配结果中易产生多峰性,同时误匹配的概率也随之增大,严重影响匹配的精度和稳定性。为此,Nygren[11]提出了使用假设检验对互相关匹配结果进行质量控制,对潜在的误匹配结果进行探测。
在假设检验中,通过构造

来判断误匹配的概率。式中,Δhi为相似地形之间的地形差异,σe为地形观测噪声水平。当误匹配的概率大于指定阙值t 时,将不使用本次匹配结果进行量测更新。
4 利用Unscented 变换进行不同历元测量数据的融合
误匹配产生的原因是由于载体真实位置所对应的地形区域z1在匹配搜索范围内有与之相似的其他地形区域z2,在测量噪声的影响下,z1与真实位置在海底地形图中所对应的地形区域z1’两者之间的差异大于z2与z1’之间的差异。当搜索范围和测量噪声固定,同时参与匹配的地形测量值增加时,产生误匹配的几率将以指数级的速度下降[11]。因此,可以通过增加单次匹配中地形测量值数量,即同时使用相邻观测历元获取的地形测量值进行匹配的方法来减小误匹配出现的几率。然而,由于不同地形测量历元之间的INS 数据存在误差,相应的地形匹配结果也将受到INS 误差的影响。因此,在误匹配诊断判断可能产生误匹配的时候,使用Unscented 变换[12](UT)进行不同地形测量历元间的地形数据融合,以减少INS 误差转换到地形测量值误差过程中海底地形非线性的影响,从而通过增加地形匹配数据量的方法提高地形匹配结果的精度和稳定性。
通过使用UT,sigma 点选择如下:


λ=α2(n+κ)-n,其中α 和κ 分别为控制sigma 点分布距离的参数。每个sigma 点Xj对应两个权值和,分别用于计算变换后的均值和方差。
通过使用sigma 点,新的地形测量值ynew,j~N(uy,i,Qy,i)为:
式中,i表示单次地形测量值的对应波束序数。
5 导航方法
本文使用的导航方法采用基于等值线的互相关方法进行地形匹配。匹配结束后,使用假设检验对匹配结果进行误匹配诊断。对于通过检验的匹配结果,将其作为Kalman 滤波的量测更新观测值进行滤波。而对于未能通过假设检验的匹配结果,算法将不使用其进行测量更新,并将其与下一次观测获得的地形测量数据进行融合,组成新的地形测量数据,然后使该数据重新进行地形匹配。只有当匹配结果通过假设检验时,算法才会使用其进行量测更新。
6 实验结果及分析
为了验证文中所述方法的有效性,以渤海湾3 km×7 km 水域多波束测深实测数据为背景场(图1)进行仿真实验。水下载体航在航行过程中,载体每隔110 m 使用多波束测深系统进行海底地形测量,多波束系统的波束数为121。仿真中,背景场地形图噪声误差设为0.1 m。与此同时,INS 中的漂移误差设为航行距离的1%,载体在水平方向上的初始搜索半径为500 m。
实验中,先将声呐测量噪声水平设为0.1 m,进行蒙特卡洛仿真实验(图2)。如图2,在地形测量值的精度较好的情况下,基于等值线的互相关匹配的结果具有很高的精度,且不易受误匹配的干扰。
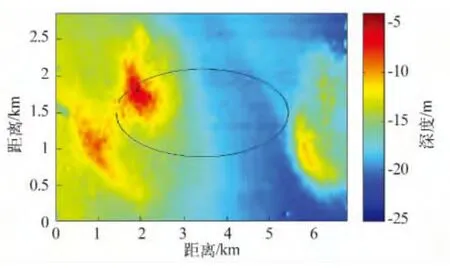
图1 实验区域水下地形背景场及实验航迹Fig.1 Background of underwater terrain and the test track in the test area
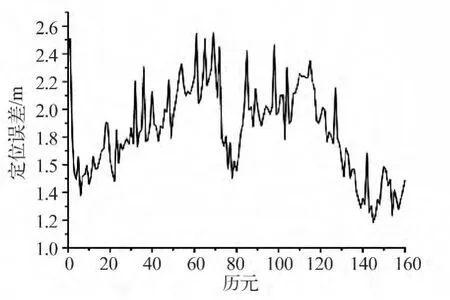
图2 导航算法的定位偏差Fig.2 Positioning deviation of navigation algorithm
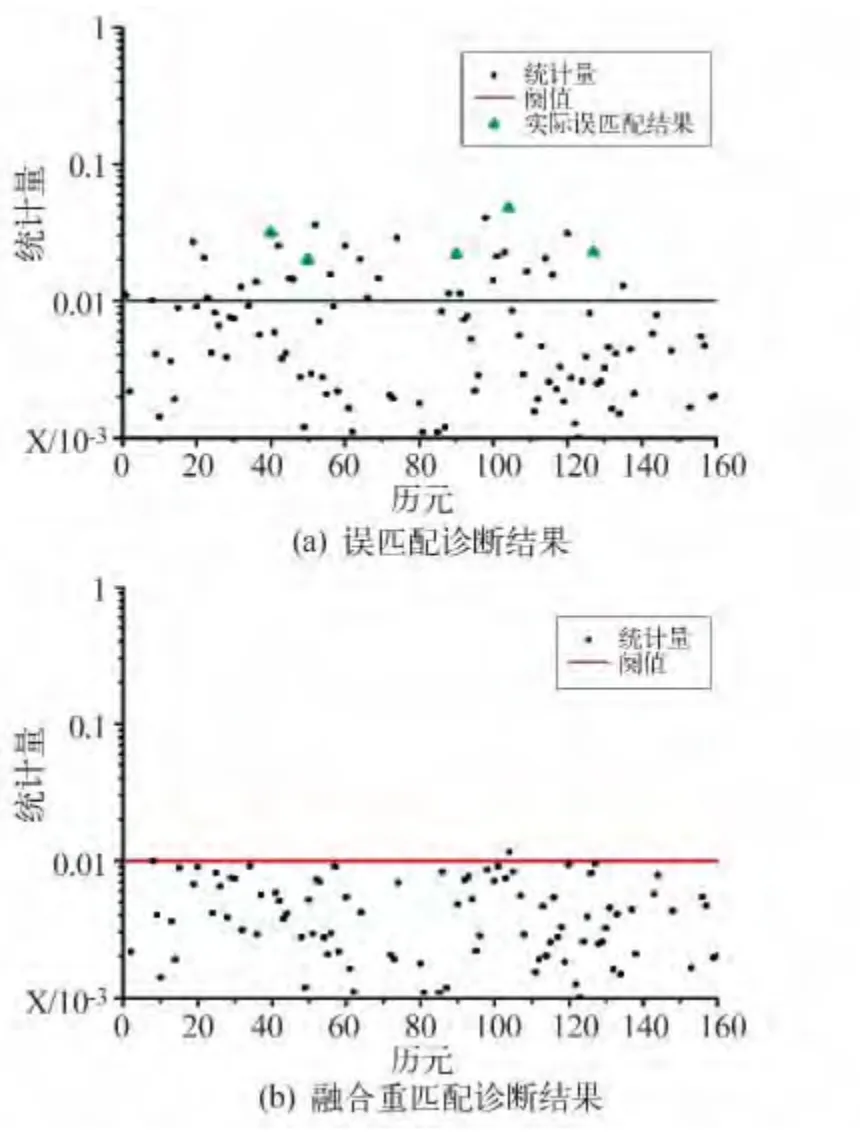
图3 地形观测噪声水平为0.2 m 时的诊断结果Fig.3 Diagnosed results of terrain observation with noise level 0.2m
随后将声呐测量噪声水平增大为0.2 m,并进行仿真实验(图3、图4)。图3 为匹配导航过程中进行误匹配诊断的结果,从图3 可以看出,随着地形测量值中的噪声增大,产生误匹配的几率也相应增大,同时误匹配诊断的警报次数也随之增加。而在误匹配诊断发出警报之后,使用Unscented 变换融合相邻历元的地形观测数据重新进行匹配,相应的误匹配诊断结果见图4,而未进行误匹配诊断的导航定位结果由图4(b)给出。从图4 可以看出,在易于产生误匹配的区域使用融合数据进行匹配,显著地减小了误匹配的几率。在使用融合数据进行匹配之后,误匹配诊断仅发出一次警报,而图3 中的误匹配结果也通过使用融合数据被消除。
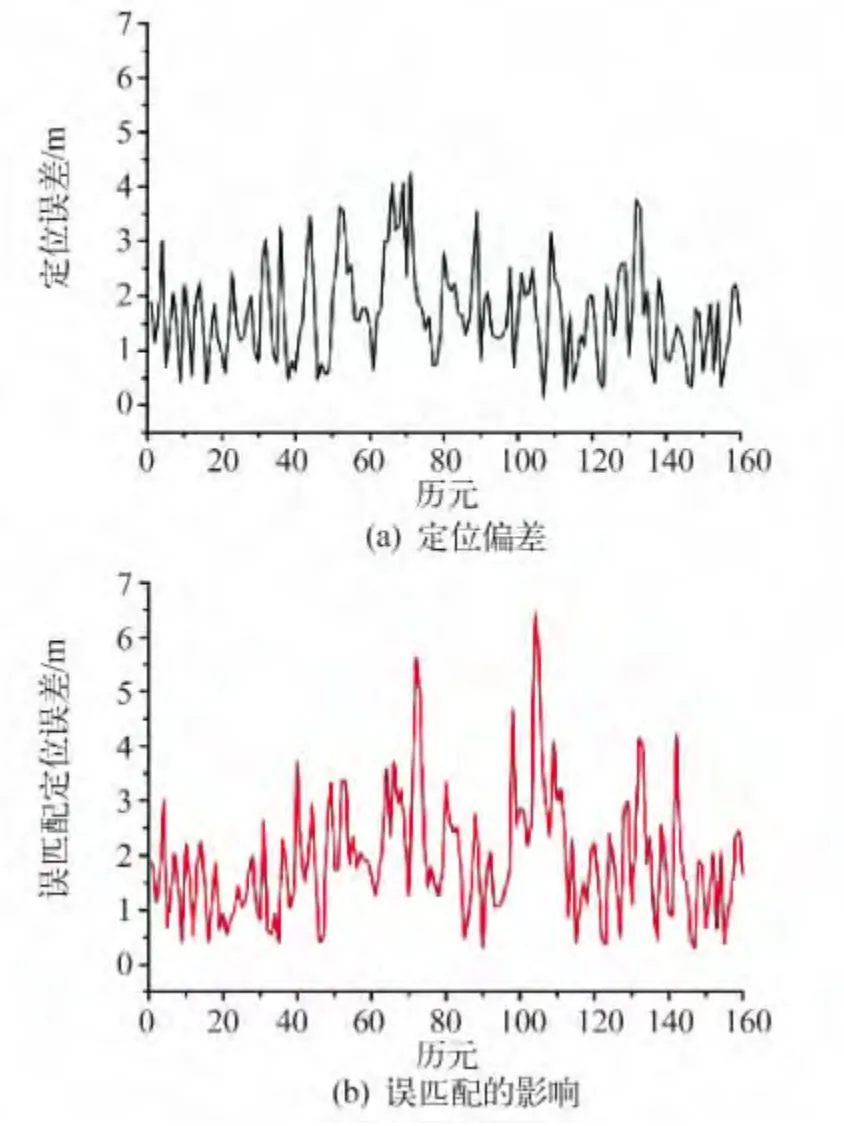
图4 导航算法的定位偏差及误匹配的影响Fig.4 Influence of positioning deviation and false matching of navigation algorithm
7 结论
本文提出了一种基于假设检验和Unscented 变换数据融合的地形匹配导航方法,该方法通过使用假设检验进行误匹配诊断,并在误匹配被探测时,再使用Unscented 变换融合相邻历元的地形观测数据重新进行匹配,以提高匹配定位的精度和稳定性。实验验证了该方法的有效性。
1 刘勇.海底地形匹配导航技术研究[D].哈尔滨工程大学,2009.(Liu Yong.Study on navigation technique with underwater terrain matching technology[D].Harbin Engineering University.2009)
2 谭佳琳.基于粒子群优化的地形匹配导航算法研究[D].哈尔滨工程大学,2009.(Tan Jialin.Study on terrain matching navigation algorithm based on particle swarm optimization[D].Harbin Engineering University.2009)
3 李恒.基于水下地形匹配的捷联系统误差估计方法[J].海军工程大学学报,2012,24(1):40-44.(Li Heng.SINS error estimation based on underwater terrain matching[J].Journal of Naval University of Engineering.2012,24(1):40-44)
4 张涛.混沌优化水下地形匹配算法研究[J].中国惯性技术学报,2009,17(2):156-164.(Zhang Tao.Study on underwater terrain matching algorithm based on chaotic optimization[J].Chinese Journal of inertial technology.2009,17(2):156-164)
5 庞永杰.基于改进贝叶斯估计的水下地形匹配辅助导航方法[J].仪器与仪表学报,2012,33(10):2 161-2 167.(Pang Yongjie.Underwater terrain matching navigation TMNA method based on improved Bayesian estimation[J].Chinese Journal of Scientific Instrument.2012,33(10):2 161-2 167)
6 谌剑.一种基于粒子滤波的水下地形匹配算法研究[J].海军工程大学学报,2009,12(6):107-112.(Shen Jian.Study on underwater terrain matching algorithm based on particle filter[J].Journal of Naval University of Engineering.2009,12(6):107-112)
7 张凯,赵建虎.基于支持向量机的水下地形适配/误配区划分方法的研究[J].大地测量与地球动力学,2013(待刊).(Zhang Kai and Zhao Jianhu.Study on recognition and classification of matching/unmatching underwater background area based on SVM[J].Journal of Geodesy and Geodynamics,2013(to be published))
8 Anonsen K B and Hallingstad O.Terrain aided underwater navigation using point mass and particle filters[A].Proceedings of the IEEE/ION Position Location and Navigation Symposium[C].2006.
9 Meduna D K,Rock S M and McEwen R.Low-cost terrain relative navigation for long-range AUVs[R].In OCEANS 2008.Oceans,Polesand Climate:Technological Challenges,QuebecCity,Quebec,September 2008.
10 Karlsson R,Gusfafsson F and Karlsson T.Particle filtering and Cramer-Rao lower bound for underwater navigation[R].Proceedings of IEEE Int Conf Acoust Speech.,Signal Process.HongKong,Apr.2003.
11 Nygren I.Terrain navigation for underwater vehicles[D],School of Electrical Engineering,Royal Institute of Technology(KTH),Sweden,Stockholm,Sweden.2005.
12 Julier S J and Uhlmann J K.Unscented filtering and nonlinear estimation[A].In Proceedings of the IEEE[C].2004,92:401-422.doi:10.1109/JPROC.2003.823141.
猜你喜欢
中国惯性技术学报(2020年2期)2020-07-24 08:41:02
通信技术(2019年3期)2019-05-31 03:19:08
电子测试(2018年6期)2018-05-09 07:31:54
声学与电子工程(2017年1期)2017-06-22 11:30:09
World Journal of Integrated Traditional and Western Medicine(2017年3期)2017-03-10 18:18:16
World Journal of Integrated Traditional and Western Medicine(2016年4期)2016-03-28 02:08:04
World Journal of Integrated Traditional and Western Medicine(2016年2期)2016-03-14 23:06:38
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
四川师范大学学报(自然科学版)(2015年4期)2015-02-28 14:08:20
