基于VRS 技术的高差测量精度的研究*
2014-02-13 05:43张红娟侯海倩
大地测量与地球动力学 2014年1期
张红娟 侯海倩 张 超
1)中国地质大学长城学院测绘教研室,保定 071000
2)中国矿业大学地球科学与测绘工程学院,北京 100083
3)中国地质大学地球科学与资源学院,北京100083
1 引言
近年来,网络RTK 测量技术快速发展,用户使用时无需建立基准站,只需在流动站处架设接收机即可实现厘米级的实时定位,目前应用广泛的实现算法是VRS 技术。与传统RTK 相比,网络RTK 具有服务范围广、定位精度高、可靠性强和可用性高等特点[1],特别是其服务范围内定位精度均匀的特点使其成为GNSS 的研究热点之一[2]。
然而,VRS 技术的定位精度为2 ~3 cm[3],限制了VRS 技术在高程精度要求较高的工程中的应用。但某些特定工程关心的是两监测点间的高差,如果对相距不太远的两点进行同步观测,通过观测结果求差的方法减弱两站的公共误差,从而提高大地高高差的监测精度,这样就为应用VRS 技术进行煤矿开采沉陷监测等工作提供了可能。
2 VRS 技术定位原理
通常,一个完整的VRS 系统由参考站、数据处理中心、用户和数据通讯四部分组成。参考站采用连续观测的方式采集卫星观测数据并实时地传输到数据处理中心。通过单点定位,用户流动站首先将自己的概略坐标发送给数据处理中心。数据处理中心根据流动站的概略坐标选择附近几个条件好的参考站,然后在概略坐标位置处生成一个虚拟参考站,并对该位置处的电离层延迟、对流层延迟等空间距离相关误差进行建模并生成虚拟参考站的虚拟观测值或其改正数信息,将其发送给流动站。流动站结合自身的观测值实现高精度实时定位(图1)。
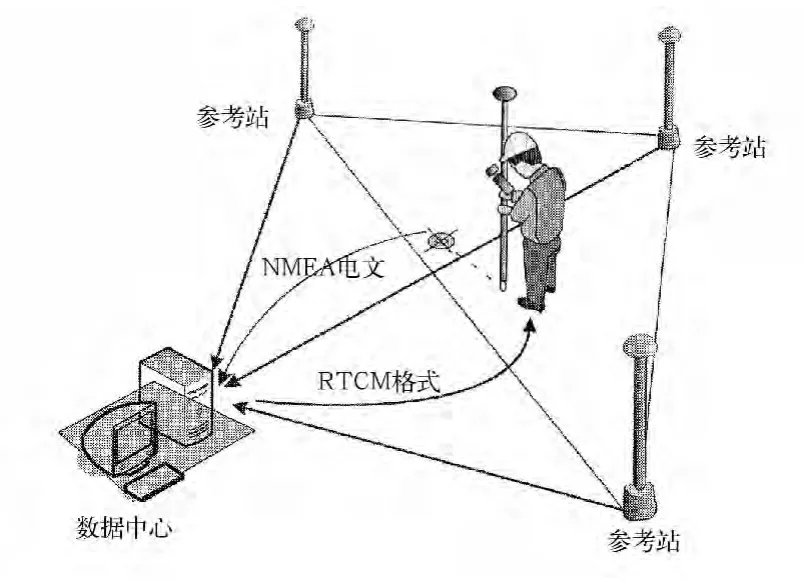
图1 VRS 技术工作原理图Fig.1 Functional diagram of VRS technique
3 VRS 技术下同步观测高差精度分析
3.1 轨道误差对高差的影响
文献[5]提出了一种适用于区域参考站网络的VRS 精密轨道实时改正数生成法,并将其命名为“VRS 轨道改正法”。它是基于广播星历(brd)和IGS 发布的精密预报星历(igu),直接计算流动站与参考站间的双差轨道改正数,然后将改正数发送给用户,实现用户位置轨道误差的精确改正。研究表明,与现有常规内插方法相比,该方法具有更高的轨道误差改正精度,使轨道误差对100 km 以内的网络RTK 定位精度的影响为亚毫米级。由上可知,对于VRS 技术下的相近的两点进行同步观测,轨道误差对高差的影响可以忽略不计。
3.2 大气折射对高差测量精度的定量分析
在影响GNSS 定位的各种误差中,电离层误差是最主要的误差。借鉴近十年关于电离层延迟内插改正方法的研究成果[5],选择坐标线性内插法(LIM算法)对VRS 技术实现两相近点(<3 km)同步观测,电离层延迟对高差的影响进行定量分析。
实际观测中,在相近的两点u1和u2进行同步观测,数据处理中心接收到两点的概略坐标后选择两点周围三个最优的参考站A、B、C 构成VRS 定位参考站网络。假设用户流动站距离参考站A 较近,故选择A 为主参考站,B、C 为辅助参考站,并假设它是等边三角形,取基线长L=70 km(图2)。各参考站的坐标为,用户流动站u1和u2的坐标分别(xu1,yu1)和(xu2,yu2),它们之间的距离为

使用LIM 算法对两个用户流动站处的双差电离层延迟改正进行内插,即:
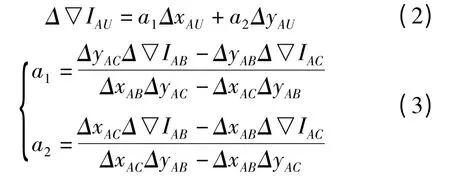
式中,Δ▽IAU为用户接收机与主参考站的双差电离层延迟,Δ▽IAB、Δ▽IAC为各辅助参考站与主参考站的双差电离层延迟。
将用户流动站和各参考站的坐标代入可得
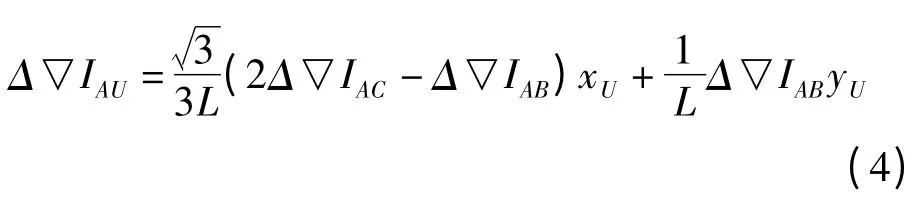
为研究方便假设A、B 和A、C 间的双差电离层延迟大小相等,即Δ▽IAB=Δ▽IAC=Δ▽I,式(4)可简化为
2016年的田间试验在肇庆市高要区金渡镇冲口村进行,试验地常年种植蔬菜,土壤为河流冲积土,肥力较好,有机质含量2.87%,pH值5.9,灌溉条施件好,历年黄瓜灰霉病发生较重;2017年的田间试验在肇庆市高要区蚬岗镇富佛村进行,试验地常年种植蔬菜,土壤为河流冲积土,肥力较好,有机质含量2.82%,pH值5.8,灌溉条施件好,历年黄瓜灰霉病发生较重。
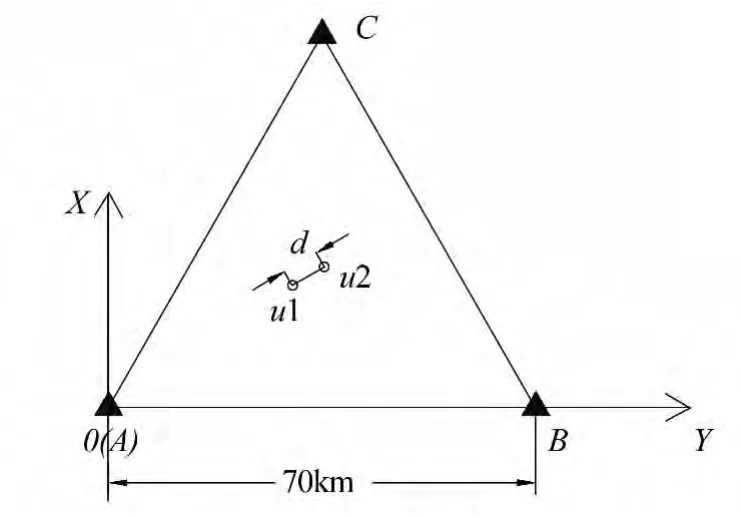
图2 坐标内插法模拟定位图Fig.2 Simulation positioning chart of coordinate interpolation method

电离层对两用户流动站影响的差值为

由于

所以电离层延迟对两用户流动站影响的差异为

参考站间双差电离层延迟是通过连续运行的参考站观测数据通过双频计算方法得到的。由VRS技术误差分析可知,电离层延迟受到多种因素影响,根据文献[5]的研究结果,取Δ▽I=0.1 m,并把L=70 km,d=3 km 代入式(8)得

在同步观测的条件下,电离层延迟对相近点间基线的影响的残余误差小于6 mm,基线可以表示为水平分量和垂直分量的矢量和,假设水平分量和垂直分量大小相等,那么垂直分量为σh<4.2 mm,由此计算的每千米高差中误差为

由此可以得出以下推论:
1)应用VRS 技术,同步观测的两用户流动站受到的电离层延迟影响的差异与两测站的距离成正比,随着两测站间距离d 的增大,电离层延迟改正数的差异也会增大;
2)当两点相距很近(<3 km)时,电离层延迟对两测站的影响近似相等,可采用同步观测、观测结果求差来消除两站的公共误差,从而提高高差的测量精度。
传统GPS 相对定位中,对流层延迟的影响与电离层对定位精度的影响相当,均为1 ~2 ppm,可以推知对流层延迟对高差的影响与电离层延迟对高差的影响相当。在忽略多路径效应和观测噪声的影响的情况下,同步观测时两点间每公里高差中误差为

3.3 多路径效应对高差的影响
由于多路径效应在基线两端不具有相关性[6],也无法通过差分技术消除或减弱其影响。现有方法和措施在静态数据处理中取得了较好的效果,对动态变形监测中消除或减弱多路径误差的研究还很不足。黄声享等人[7]提出了多路径误差具有周日重复的特性,因为在两万公里高空的卫星,相对于地球的运动是有规律的,它们绕地球一周的时间为12 恒星时(11h58min),所以,对于地面观测者来说,每天将提前4 分钟在同一位置见到同一颗卫星。
根据卫星位置的确定性和观测点位置的确定性,如果每期观测时固定卫星的空间位置,接收机接收相同卫星的高度角每期相同,由此各期产生的多路径误差近似相等,对高程的影响也近似相等。这样,通过同步观测,观测结果求差得到的高差中含有相同的多路径效应的影响,即可将其转化成了各期高差均含有的系统误差。当用各期高差之差作为工程观测量依据时,就可以消除多路径效应对高差之差的影响。
4 试验数据处理与精度评定
4.1 试验数据采集
试验基于河北省卫星定位综合服务系统(SWEPOS-HEBEI),该系统目前共有34 个连续运行参考站,平均点间距为70 km,可提供CGCS2000 基准下的定位成果。由于条件限制只布设a、b 两点,相距2.53 km。a、b 两点地势较高,视野开阔,能够同时接收到8 ~12 颗卫星信号;GPRS 通信信号良好,能接收到良好的CORS 系统的内插改正信息。
实验中使用脚架安置接收机,采用准动态测量形式在a、b 两点上以1 秒采样率采集5 个有效观测历元,每一分钟进行一次测量并存储测量结果,观测6 分钟得6 个大地高数据。连续观测六天,采用定人、定仪器、定时的作业方法,第二天观测时间比前一天提前4 分钟。
4.2 试验结果分析
数据处理使用TTC 数据处理软件,测量结束后立即将手簿中的.dc 文件以.CSV 格式导出以便查看点位坐标信息。设a 点、b 点以每天6 次采集的大地高数据取平均值作为当天该点最终大地高成果,分别为Ha,Hb;每天各点采集一组数据计算的高程标准差(内部符合精度),分别为ma、mb;计算每天各点间大地高高差结果为Hb-Ha,见表1。
计算a、b 高差观测值中

按

计算a、b 每千米高差。
中误差试验数据见表1。
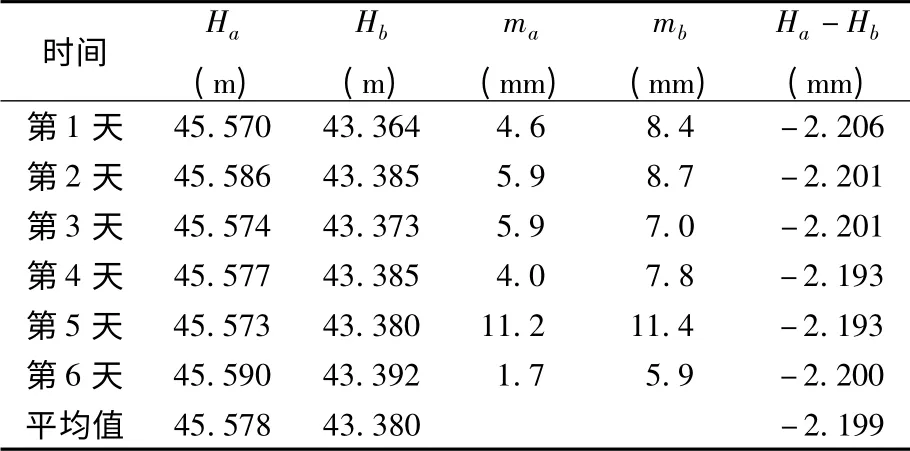
表1 每天大地高高程、高程标准差、点间大地高差Tab.1 Everyday observed data of geodetic elevation,standard deviation of every point’s height and elevation difference of point to point
由表1 可知:
1)a、b 两点在6 个周期观测中,高程的波动相关性很好,设计原理(同步、定时等)和相应措施达到了预期目的;
2)各点各周期VRS 高程内部符合精度为1.7~11.4 mm,符合目前VRS 技术的定位精度;
3)a、b 两点间高差值6天数据离散很小,由公式(13)计算的每千米高差中误差3.2 mm≤5 mm,完全满足四等水准测量要求,同时验证了理论公式推导的正确性。
5 结束语
虽然VRS 技术测定点位的精度目前只能达到厘米级,然而对于相距不太远的两点进行同步观测,通过观测结果求差的方法能够有效消除两点间公共误差,根据多路径效应的周日特性以及其它系统误差的特点,采用定时、定仪器、定人的观测措施可以达到固化误差的目的,从而提高了高差的观测精度,从而为VRS 技术实现毫米级高差观测精度成为可能。文中通过理论分析、公式推导给出了证明,通过算例进行了初步验证,由于研究水平和客观条件的限制,文中存在一些不足之处,如VRS 技术实现毫米级精度高差观测的两个点间的最大距离能达到多少千米;不同时间段的同步观测,高差精度有何变化等问题函待解决,需进一步试验。
1 高星伟,陈锐志,赵春梅.网络RTK 算法研究与实验[J].武汉大学学报(信息科学版),2009,34(11):1 350-1 353.(Gao Xingwei,Chen Ruizhi and Zhao Chunmei.A network RTK algorithm and test[J].Geomatics and Information Science of Wuhan Uniwersity,2009,34(11):1 350-1 353)
2 中国科学技术协会.2009—2010 测绘科学与技术学科发展报告[M].北京:中国科学技术出版社,2010.(China Association for Science and Technology.2009—2010 report on advance of science and technology in surveying & mapping[M].Beijing:Chinese Science and Technique Press,2010)
3 刘彦芳.VRS 技术的改正信息生成算法及定位精度研究[D].河北理工大学,2010.(Liu Yanfang.Study on generation algorithms of differential corrections and position accuracy for virtual reference station technique[D].Hebei Polytechnic University,2010)
4 杨洋.虚拟参考站(VRS)技术及其精度评定[D].西南交通 大 学,2007.(Yang Yang.Vitural Reference Station(VRS)technique and evaluation of accuracy[D].Southwest Jiaotong University,2007)
5 李成刚.网络GPS/VRS 系统高精度差分改正数信息生成与发布研究[D].西南交通大学,2007.(Li Chenggang.Generating and releasing technique of precise differential corrections for GPS/VRS network[D].Southwest Jiaotong University,2007)
6 戴吾姣,丁晓利,朱建军.GPS 动态变形测量中的多路径效应特征研究[J].大地测量与地球动力学,2008,(1):65-70.(Dai Wujiao,Ding Xiaoli and Zhu Jianjun.Study on multipath effect in structure health monitoring using GPS[J].Journal of Geodesy and Geodynamics,2008,(1):65-70)
7 Georgiadou Y and Kleusberg A.On carrier signal multi-path effects in relative GPS positioning[J].Manuscripta Geodaetica,1998,(13):172-179.
猜你喜欢
中国交通信息化(2022年8期)2022-11-20
北京航空航天大学学报(2022年8期)2022-08-31
导航定位学报(2022年2期)2022-04-11
北京航空航天大学学报(2021年9期)2021-11-02
今日农业(2021年15期)2021-10-14
科教导刊·电子版(2017年32期)2018-01-09
职教论坛(2017年23期)2017-11-15
法制与社会(2017年29期)2017-11-03
卷宗(2017年1期)2017-03-17
太空探索(2016年6期)2016-07-10