
基于PSO-SVM的MODⅠS数据海上云检测
2014-02-08 01:46张伟马卫民曹洋
海洋预报 2014年4期
张伟,马卫民,曹洋
基于PSO-SVM的MODⅠS数据海上云检测
张伟,马卫民,曹洋
(中国卫星海上测控部,江苏江阴214431)
为利用中分辨率成像光谱仪(MODIS)数据实现海上云的检测,提出一种结合粒子群优化算法(PSO)与支持向量机(SVM)的检测方法。根据海洋下垫面的特点,选取了合适的特征量,利用具有较强全局搜索能力的粒子群优化算法对支持向量机中的参数进行优化调整,改善了支持向量机的分类性能,试验结果表明,该方法能获得较高的分类精度,可以较好的实现海上云的检测。
海上云检测;粒子群优化算法;支持向量机
1 引言
通过卫星遥感获得海洋信息是海洋研究的重要方法之一,其能保证较高的时间分辨率和空间分辨率。但海上云的存在,会较大的影响遥感反演的准确性,从而导致海洋信息定量化产品精度的降低。近年来利用中分辨率成像光谱仪(MODIS)影像数据进行云检测是遥感领域的研究热点,一部分研究是通过光谱分析、设置阈值形成算法,一部分研究则是基于统计理论进行研究,这都取得了一定的效果。
支持向量机(Support Vector Machine,SVM)是Cortes和Vapnik于20世纪90年代首先提出的,它以统计学习理论为基础,在解决小样本、非线性及高维模式识别中表现出许多特有的优势,并能够推广应用到函数拟合等其他机器学习问题中[1]。该算法自提出后就开始广泛的应用于文本分类、语音识别、故障识别和预测等领域,都取得了较好的效果[2-3]。但该算法应用在云检测上并不多见,赫英明等[4]运用支持向量机软件包Libsvm进行了云检测,证明了支持向量机方法在遥感影像分类中的优势。本文旨在利用支持向量机实现海上云检测,同时利用粒子群算法(Particle Swarm Optimization,PSO)搜索支持向量机的最优参数组合(惩罚参数C,核参数σ),改善支持向量机的分类性能,使其更好的应用于海上云检测。
2 支持向量机理论及特征量选取
2.1支持向量机理论
支持向量机的基本思想可以概括为:对于非线性可分样本,通过核函数,将输入样本空间映射到一个高维乃至无穷维的线性特征空间,然后在这个特征空间中应用线性学习机的方法解决样本空间中的高度非线性分类和回归等问题。
标准的C-支持向量分类机算法如下[5]:
给定训练集T={(x1,y1),···,(xl,yl)}∈(Rn×Y),式中,xi∈Rn,yi∈Y={1,-1},i=1,···,l。选取适当的核函数K(x,x')以及惩罚参数C>0,构造并求解凸二次规划问题:
得解α*=(,···,。
选取位于开区间(0,C)中的α*的分量,按公式(2)计算出b*:


表1 所选波段及器主要应用领域
2.2特征选取
(1)红外波段11μm通道BT11。在晴空条件下,11μm上的辐射主要来自下垫面,大气的贡献很小,能够较好的反映地表辐射物的特性[6]。由于海面温度比较均一稳定,而云的亮温也平均保持在一个比较低的值,二者之间有比较稳定的温度差,所以该通道可以较好的应用于海上云的检测。
(2)近红外波段1.38μm通道反射率R1.38。1.38μm通道处于水汽吸收带,低层的反射会由于水汽的吸收而减弱,而高层卷云具有相对较高的反射率,从而使高层的薄卷云得以检测出来[7-8]。
(3)可见光波段0.66μm、0.87μm通道反射率R0.66、R0.87。可见光波段0.66μm处,晴空数据具有较低的反射率,厚云则有高的反射率[9];由于水体在0.87μm具有较强的吸收特性,因此水面上的反射主要来自瑞利散射和气溶胶散射[6]。这些散射的影响较小,更能突出云;而(R0.66-R0.87)(R0.66+R0.87)以及R0.66R0.87也常被用来区分云和下垫面[10-11]。
(4)红外亮温差BTD11-3.75、BTD11-8.6。3.75μm通道位于3.5—4μm的中红外窗口,受水汽的影响较11μm要弱的多,通常3.75μm通道的亮温比11μm高,但是层状低云的云顶亮温却相反,所以可以利用11μm和3.75μm通道的亮温差异进行云检测,该方法可以有效的检测到层状低云。8.6μm对大气吸收很敏感,特别是水汽吸收,同样的,它对于表面发射辐射也很敏感。由于8.6μm处的地表发射辐射比11μm处要小,利用8.6μm和11μm的亮温差可以检测中高云[12-13]。
综上所述,本文采用BT11、R1.38、R0.66、R0.87、BTD11-3.75、BTD11-8.6六个特征量进行云检测。表1为所选波段及其主要应用领域。
3 支持向量机参数优化
3.1粒子群算法
支持向量机对参数的选择非常敏感,参数的取值直接影响着支持向量机学习能力和推广能力。针对这个问题,许多学者从不同的角度进行了讨论和研究,都取得了一定的效果,但也存在着一些不足,例如收敛速度慢、精度低等等[14-16]。美国电气工程师Eberhart和社会心理学家Kennedy于1995年基于鸟群觅食行为提出了粒子群优化算法,该算法概念简单、实现方便、收敛速度快、参数设置少,是一种高效的搜索算法。目前许多学者应用该算法实现对支持向量机参数的选择,通过试验表明,粒子群算法可以较好的应用于支持向量机参数选择[17-18]。
粒子群算法描述如下[19]:
设粒子群群体规模为m,zi=(zi1,zi2,···,ziD)为第i个粒子(i=1,2,···,m)的D维位置矢量,vi=(vi1,vi2,···,viD)为第i个粒子的飞行速度,pi=(pi1,pi2,···,piD)为粒子迄今为止搜索到的最优位置,pg=(pg1,pg2,···,pgD)为整个粒子群迄今为止搜索到的最优位置。在每次迭代中,粒子根据下式更新速度和位置:

式中,i=1,2,…m,d=1,2,…,D,k是迭代次数,r1和r2为[0,1]之间的随机数,c1和c2为学习因子。
3.2PSO-SVM参数优化模型
(1)对训练样本集进行归一化处理。由于各特征量单位、量级并不一致,为避免运算过程中大数“吃”小数现象,故将每一维的数据归一化到[-1,1]之间;
(2)对PSO进行初始化,随机产生一组{C,σ}作为粒子的初始位置;
(3)计算每个粒子的适应度。将表征个体的参数C和σ代人SVM中进行训练和预测,将SVM的预测结果同样本真实值一起构成个体适应度函数如式(5)所示:
式中,f表示适应度值,n为样本数,y(i)表示预测值,y'(i)为样本真实值;
(4)根据粒子的适应度值来更新粒子本身和群体所对应的最佳适应度值及最优位置,利用式(3)、式(4)对粒子的速度和位置进行调整,得到新的粒子位置,即得到新的SVM参数组合{C,σ};
(5)如未满足最大迭代次数或满足结束条件,返回步骤(3),否则输出最优参数组合。
将最终得到的最优参数组合{C,σ}重新训练样本集,得到分类器模型,即可用于预测。
4 算法实现及案例分析
4.1海上云检测算法实现
根据以上理论及算法,整个海上云检测的具体实现步骤如下:
(1)对数据源进行预处理,提取各特征量值,形成训练样本集及测试样本集,并进行归一化处理;
(2)按照PSO-SVM参数优化模型对训练样本集进行训练,得到最优参数组合{C,σ}及其分类器模型;
(3)利用步骤(2)得到分类器模型对测试样本集进行预测。
4.2案例分析
基于上述新算法实现步骤,对2009年3月28日2时40分(世界时)MODIS数据进行云检测,数据分辨率为1 km,经过定标计算和几何校正处理,选取测试样本数据范围为112.0°—118.0°E,12.0°—20.0°N,位于中国南海区域。图1—3分别为波段1、31及云检测结果图。图1中暖色表示反射率较高,图2中暖色表示温度较低,图3中白色表示云,黑色表示晴空。
比较图1—3,图左上角具有较高反射率、较高温度的云,左下角具有较低反射率、较低温度的云,都被较好的辨别出来了(见图3);右下角有大片的成丝缕状结构的卷云系也被较好的检测出来。
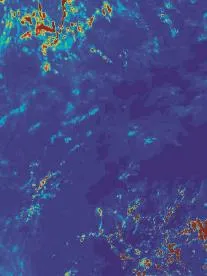
图1 MODIS 0.66 μm通道
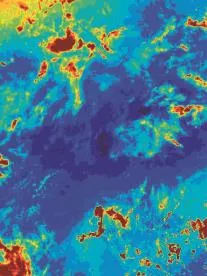
图2 MODIS 11 μm通道

图3 云检测结果
利用台湾大学Chih Wei Hsu等人开发的Libsvm支持向量机工具包中的grid.py程序也可以得到一组优化参数组合{C,σ},为验证本文算法对云的检测能力,以及PSO-SVM参数优化模型的优势,本文参照NASA发布的MOD35云掩膜产品,比较了通过Libsvm与本文算法得到的云检测结果,其对比结果如表2。本文在不同季节、区域MODIS数据中提取6000多个样本数据,在进行训练时,将6000多个样本数据随机的分成训练样本及验证样本,其中训练样本取4000多个,剩下的则作为验证样本,最终获得表2所示的训练样本分类精度;本文分析的案例包含480000个数据,但计算测试样本分类精度时仅使用NASA认为确定的晴空和云数据,共310793个数据。通过比较可以看出PSO-SVM参数优化模式在寻找最优参数组合{C,σ}上的优势,同时测试样本的较高分类精度也表明支持向量机可以较好的应用于海上云检测。

表2 不同参数优化方式下分类性能对比
5 结论
本文根据海洋下垫面的特征,结合MODIS资料,选取了适当的特征量。利用支持向量机在小样本分类方面的优势,应用于海上云的检测,同时利用粒子群算法容易实现、收敛速度快的特点,对支持向量机中的重要参数进行了优化调整。试验结果表明,本方法分类精度较高,可以较好的实现海上云检测,为海上云的识别提供了一种简单易行的方法。
[1]Vapnik V N.Nature of Statistical Learning Theory[M].New York: John-Wiley,1995.
[2]Christopher J C B.A tutorial on support vector machines for pattern recognition[J].Data Mining and Knowledge Discovery, 1998,12(2):121-167.
[3]边肇祺,张学工.模式识别[M].北京:清华大学出版社,2000:1-5.
[4]赫英明,王汉杰,姜祝辉.支持向量机在云检测中的应用[J].解放军理工大学学报(自然科学版),2009,10(2):191-194.
[5]邓乃扬,田英杰.支持向量机:理论、算法与拓展[M].北京:科学出版社,2009.
[6]王家成,杨世植,麻金继,等.东南沿海MODIS图像自动云检测的实现[J].武汉大学学报(信息科学版),2006,31(3):270-273.
[7]Gao B,Goetz F H.Cirrus Cloud Detection from Airborne Imaging Spectrometer Data Using the 1.38 Water Vapor Band[J].Journal of Geophysical Research Letter,1993,20(4):301-304.
[8]Gao B.Selection of 1.375 MODIS Channel for Remote Sensing of Cirrus Clouds and Stratospheric Aerosols from Space[J].American Meteorological Society,1995:4231-4237.
[9]Chen P Y,Srinivasan R,Fedosejevs G,et al.An automated cloud detection method for daily NOAA-14 AVHRR data for texas,USA [J].International Journal of Remote Sensing,2002,23(15): 2939-2950.
[10]李微,方圣辉,佃袁勇,等.基于光谱分析的MODIS云检测算法研究[J].武汉大学学报(信息科学版),2005,30(5):435-443.
[11]Andrews M D,Ardanuy P E.A generalized scenario for cloud detection using MODIS-n[A].Geoscience and Remote Sensing Symposium,1990:1487-1489.
[12]Saunders R W.An Automated Scheme for the Removal of Cloud Contamination from AVHRR Radiances over Western Europe[J]. International Journal of Remote Sensing,1986,7(7):867-886.
[13]Ackerman S,Strabala K,Menzel P,et al.Discriminating clear-sky from cloud with MODIS-Algorithm Theoretical Basis Document [R].2002.
[14]Cherkassky V,Ma Y.Practical selection of SVM parameters and noise estimation for SVM regression[J].Neural Networks,2004, 17(1):113-126.
[15]董春曦,饶鲜,杨绍全,等.支持向量机参数选择方法研究[J].系统工程与电子技术,2004,26(8):1117-1120.
[16]袁小芳,王耀南.基于混沌优化算法的支持向量机参数选取方法[J].控制与决策,2006,21(1):111-113.
[17]姚全珠,蔡婕.基于PSO的LS-SVM特征选择与参数优化算法[J].计算机工程与应用,2010,46(1):134-136.
[18]任江涛,赵少东,许盛灿,等.基于二进制PSO算法的特征选择及SVM参数同步优化[J].计算机科学,2007,34(6):179-182.
[19]纪震,廖惠连,吴青华.粒子群算法及应用[M].北京:科学出版社,2009:17-18.
Cloud over sea detection of MODⅠS data based on PSO-SVM
ZHANG Wei,MAWei-min,CAO Yang
(China Satellite Maritime Tracking and Controlling Department,Jiangyin 214431,China)
In order to detect the cloud over sea using the moderate resolution imaging spectroradiometer data,a new method was introduced based on the Particle Swarm Optimization and Support Vector Machine.According to the characteristic of surface of sea,appropriate feature was selected.A better parameter value was obtained by using particle swarm optimization which has better global searching ability,which improved the classification performance of Support Vector Machine.The test results indicate that the method can obtain higher classification accuracy and has good performance of detecting the cloud over sea.
cloud over sea detection;particle swarm optimization;support vector machine
P732
A
1003-0239(2014)04-0092-05
10.11737/j.issn.1003-0239.2014.04.013
2013-06-02
国家自然科学基金(41275113)
张伟(1986-),男,工程师,主要从事卫星资料遥感反演应用方面研究。E-mail:zhwyule@sina.cn
猜你喜欢
印制电路信息(2022年11期)2022-11-30
海洋通报(2022年4期)2022-10-10
新高考·高一数学(2022年3期)2022-04-28
光谱学与光谱分析(2022年4期)2022-04-06
中学生数理化(高中版.高考数学)(2021年1期)2021-03-19
科技创新与应用(2020年6期)2020-02-29
北京理工大学学报(2016年6期)2016-11-22
电视技术(2016年9期)2016-10-17
系统工程与电子技术(2016年7期)2016-08-21
高中生学习·高三版(2016年9期)2016-05-14
