
可移动升降式全景平台的设计与实现
2014-02-08 09:32杨兆瑛杨兆龙杜明义蔡国印刘扬
城市勘测 2014年2期
杨兆瑛 ,杨兆龙,杜明义,蔡国印,刘扬
(1.北京建筑大学,北京 100044;2.山东中成信建设项目管理有限公司,山东临沂 276004)
1 引言
全景是一种新兴的富媒体技术,其与视频,声音,图片等传统的流媒体最大的区别是“可操作,可交互”。利用单反相机或街景车拍摄实景照片,经过特殊的拼合、处理、现实技术,呈现出的真实的场景,其代表有全景客(景区全景),搜搜街景(城市街景)等。全景影像给人以三维立体感觉的实景360°全方位图像,全面展示了360°球型范围内的所有景致,最大限度保留了场景的真实性,能给人以三维立体的空间感觉,使观者犹如身在其中。
目前,国内外许多全景平台是将4台或6台配备鱼眼镜头的单反数码相机安装到特定的支架平台,平台须保持严格的水平方向。每台相机除采用底部固定装置外,还须采用托架与可控制橡胶垫减弱相机的抖动程度,将相机的控制线连接到时间同步器的精确授时和控制系统,以保障多台相机能够在同一时间完成拍摄工作。
通常所设计的影像平台是集成安装于专用的车辆载体上,平台与车辆之间通过支架利用结构件及螺丝固定,这对车的内外改造程度大,车辆只能用于工程数据采集,而损失了其本身特性,对车本身造成了资源的浪费。一旦车辆出现故障,便无法进行数据采集;全景相机的固定高度对于车辆能否通过限高的交通设施增加了不确定性;当一段时间内不需要进行数据采集时还要对车辆及平台设备进行存放、保养维护。
针对上述平台所存在的问题,通过对平台改进,实现将GPS、INS、全景相机、竹节式电动升降柱等传感器设备集成到平台上。利用6个吸盘将整个平台固定于任意车辆载体上,其中4个真空吸盘用于固定平台,一后一前两个可调节高度与方向式吸盘用于固定GPS主从天线。通过竹节式电动升降柱调整相机高度,避免了受限高的影响,同时还可以有效控制全景影像中地物的形变。
2 全景平台系统设计
本文旨在设计一种平台系统,该平台系统通用性强,对任意车辆都可使用,对于平台系统的安装与拆卸方便快捷,不需要对车进行任何的改装,能够随时对相机进行高度的调整,既能避免了受到限高交通设施的限制,同时又可以针对不同高度的地物实时调整相机高度,达到最佳的拍摄效果。
平台系统主要包括3个部分,即辅助部分、核心部分、数据部分。其中辅助部分包括车辆载体、移动平台、升降柱、吸盘、电源等,这一部分主要用于辅助仪器设备采集数据,车辆作为整个平台系统的载体,为数字城市建设中城市影像与地图的采集与更新节省了时间;移动平台为固定仪器提供了环境条件;吸盘方便了平台及仪器的安装与拆卸;升降柱为全景相机采集影像数据获得更佳效果提供了保障,同时扩充了平台系统的适用性;电源为各类仪器设备提供所需电量。核心部分包括系统控制器、全景相机采集器、组合惯导系统,系统控制器通过接口及软件控制全景相机采集器与组合惯导系统采集数据,并将这两种仪器所采集的数据实时显示、存储;全景相机采集器接收惯导系统发送的脉冲信号采集影像数据,并自动处理影像,使影像达到最佳效果;组合惯导系统负责采集位置坐标数据、姿态速度数据以及时间信息,同时按设定时间给全景相机发送脉冲信号,触发其进行影像数据采集。数据部分包括全景影像数据、位置坐标数据、姿态速度数据以及时间信息,通过时间将全景影像数据与位置坐标数据、姿态速度数据实现同步。全景平台系统总体结构图如图1所示:

图1 全景平台系统总体结构图
3 系统实现及关键技术
3.1 系统概述
遵循模块化设计原则,平台按照功能划分为6大功能模块:全景影像采集模块、定位定姿模块、相机升降模块、系统控制模块、平台及固定模块以及供电模块,如图2所示。

图2 系统功能结构图
可移动升降式全景平台系统采用Ladybug3全景相机采集全景影像数据,通过遥控电动升降柱升降调整相机高度,利用SDI-600GI双天线光纤组合惯导系统实时获取位置坐标数据、姿态数据以及时间信息等,以铝合金材料的矩形板作为平台,通过球型云台与可调节角度与高度式真空吸盘将整个平台系统固定于车辆载体上。以Dell工作站笔记本电脑作为总控制器,控制各系统传感器并实时存储通过数据线传输各类数据信息。整个平台系统如图3所示:

图3 全景平台系统安装完成后效果图
3.2 各组成模块
(1)影像采集模块
影像采集模块主要用于采集全景影像数据,利用Ladybug3全景相机提供超高分辨率和360°全方位视觉范围,自动完成图像采集、处理、拼接和校正等工作,能够把多个视频图像实时整合为全分辨率数字化球面视频和全景视频。Ladybug3全景相机主要性能参数如表1所示。

全景相机主要参数 表1
在整个平台系统中,全景相机安装于竹节式升降柱顶部,通过连接件用螺丝固定,相机图像处理器通过1394b端口与系统控制器连接,实时将全景影像传输到系统控制器并保存。相机的触发接口与双天线组合惯导系统通过光纤相连,实现双向触发控制,本系统是通过惯导系统发送脉冲信号给全景相机,控制器其采集全景影像数据。
(2)定位定姿模块
定位定姿模块主要用于采集位置坐标数据、姿态数据、时间信息等,同时输出脉冲信号给全景相机,控制全景相机采集影像数据,实现坐标数据与影像数据的时间同步。平台系统采用SDI-600GI双天线光纤组合惯导系统作为定位定姿模块的主体,该系统通过紧耦合技术将GPS与INS紧密集成在一起,解决了INS长时间的漂移或GPS卫星受到限制时,不能正常定位和导航的问题,双天线提高了定向精度,缩短了定向初始化时间。GPS与INS两者相互补偿,相互作用,为用户提供稳定、高精度的三维位置信息,姿态信息、速度和时间信息等。
将组合惯导系统安装于平台上,在安装时尽量保证其中心与车身重心一致,并使其Y轴正方向与车身方向一致,主从天线一后一前安装于铝合金材料的长条板上,确保主从天线中心与惯导系统原点在一个垂直面上,主从天线中心到惯导系统原点的水平距离约为 1 ∶2。
长条板中间部分嵌入平台,其顶面与平台顶面在一个水平面上,两端通过可调节角度与高度的扳拉式真空吸盘固定于车辆载体。双天线光纤组合惯导系统主要性能参数如表2所示。
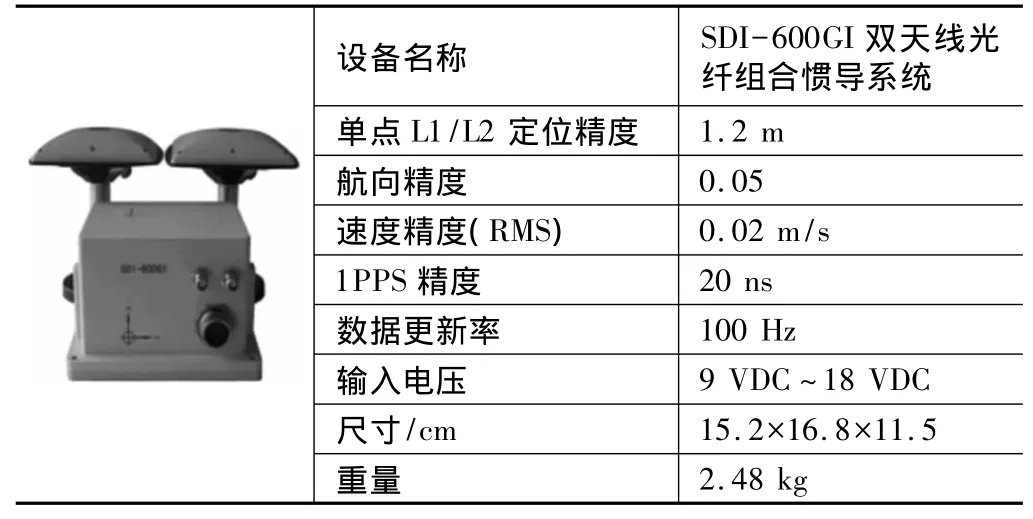
双天线光纤组合惯导系统主要参数性能 表2
(3)相机升降模块
相机升降模块主要用于调整全景相机的高度,采用竹节式电动升降柱,将全景相机通过连接件用螺丝固定于其顶端,通过无线或有线的遥控器实时控制升降柱的升降实现调整相机高度,在进行数据采集时可随时根据道路周围地物的情况(建筑物高度)调整相机高度,达到更好的影像拍摄效果,遇到限高的交通设施时,调整相机使其降到最低高度,可顺利通过。极大地提高了相机采集数据的灵活性。表3是关于升降柱的相关参数。
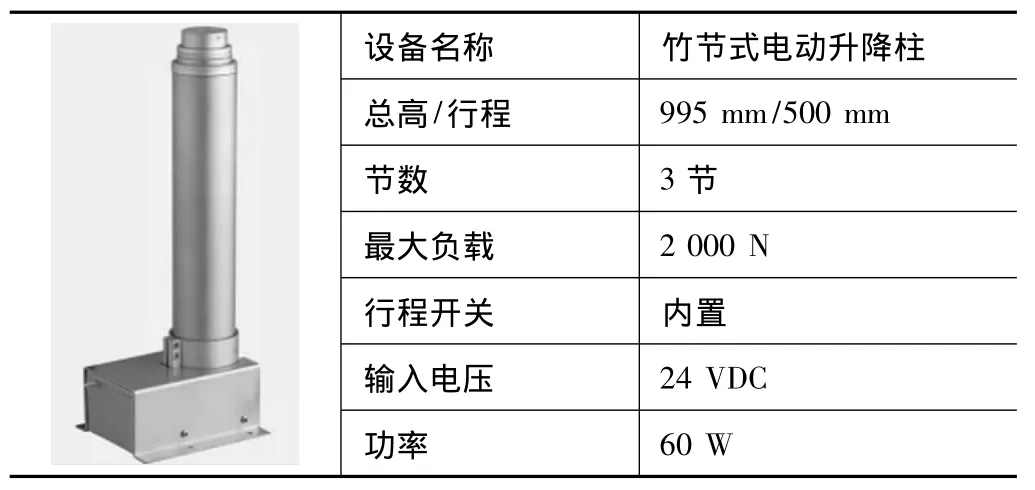
竹节式电动升降柱相关参数 表3
(4)系统控制模块
系统控制模块是整个全景平台系统的大脑,将多种传感器组合为一个整体,配置全景相机和组合导航系统相关参数,实时显示、控制、存储采集的各类数据。Dell工作站笔记本电脑作为系统控制器,控制器与全景相机通过IEEE-1394b火线接口连接,与组合惯导系统通过USB或com口连接,分别通过它们各自相应的软件对其进行参数配置,数据实现显示,采集控制以及实时存储。
(5)平台及固定模块
平台及固定模块用于安置各类仪器设备,并通过可以调节角度与高度的真空吸盘将其固定于车辆载体顶部。平台由铝合金材料的矩形板和长条板组成,长条板嵌入矩形板,长条板主要用于固定组合惯导系统的天线,平台边缘及顶点都进行了圆滑处理,防止在安装与拆卸平台的过程中对人造成伤害。按照事先设计对平台整体进行布局规划,并在平台顶面与底面相应位置加工螺纹孔用于固定仪器设备及吸盘,平台中间通过球型云台将吸盘与平台连接,两端放置天线并利用可调节方向与高度式吸盘固定。球型云台可水平360°、垂直180°旋转,起到调节平台处于水平位置的作用。
通过利用吸盘固定平台及仪器设备,便于安装与拆卸,增强了其灵活性,可移动性。吸盘的可调节性确保了平台处于水平位置,为仪器设备提供了平稳的工作环境。
(6)供电模块
供电模块主要为全景相机、组合惯导系统、竹节式电动升降柱、Dell笔记本电脑提供电源,采用蓄电池和车载电源两种供电方式。Dell笔记本电脑自身配备电池,外接电源突然断电对其影响不大,并且一定时间内可以不用为其提供电源;竹节式电动升降柱不需要实时调节其高度,仅在其需要调节高度时对其进行供电即可;全景相机和组合惯导系统对电源要求较高,提供符合其规格的电压,并且在其正常工作时不可突然断电,否则会对仪器造成损坏。
单独采用蓄电池供电,需要多配置一块以备用,由于需供电仪器较多,随着采集数据的时间延长,蓄电池电量不足以维持仪器设备正常工作。单独采用车载电源供电,只要车辆本身能正常工作,就不必担心电量的问题,供电充足,一旦车辆熄火,则会导致所有仪器立即停止工作,对仪器及采集的数据都会造成影响。根据两种供电方式各自的优缺点,采用两种供电方式相结合供电,全景相机和组合惯导系统利用蓄电池供电,竹节式电动升降柱、Dell笔记本电脑采用车载电源的供电方式,这样既缓解了蓄电池供电压力,确保其能满足数据采集数据仪器的电量供应,又不必担心因车辆突然熄火而影响仪器正常工作。
3.2 关键技术
在进行数据采集过程中,要使得全景影像数据与地理位置坐标数据、姿态数据通过一定的方式实现同步,实现的关键是在进行影像采集的同时获取位置坐标及姿态数据,我们通过时间来实现这两种数据的同步,时间同步分为两种:
(1)时间软同步,这种同步方式是仪器设备利用各自的时间系统,在采集数据时记录时间信息,在进行数据处理时,通过数据中共有的时间实现同步。全景相机利用自己的时间系统,在采集影像瞬间记录时间,组合惯导系统也利用自己的时间系统;
(2)时间硬同步,这种同步方式是通过发送脉冲信号以触发的方式来实现同步,利用光纤将全景相机与组合惯导系统连接,由于组合惯导系统接收的GPS时间精度高,所以选择由组合惯导系统发送脉冲信号给全景相机,全景相机接收到脉冲信号,触发相机快门采集影像数据,从而实现了数据的时间硬同步。
通过比较两种时间同步方式发现,在对时间间隔要求不高的情况下,两种方式都可以满足要求,只不过时间软同步处理数据时相对麻烦一些。但是如果要求时间间隔很短,在毫秒级的情况下,时间硬同步依然能够满足要求,而时间软同步会出现两种数据无法根据各自的时间同步,这是因为全景相机时间系统精度低所引起的。
4 结论
可移动升降式全景平台系统通过对传统影像平台系统进行改进,利用真空吸盘固定于车辆载体,适用于任意车辆载体,便于安装与拆卸,更加灵活,可移动性强。不需要对车辆本身做任何改造,保证了车辆的完整性。通过控制竹节式电动升降柱实时调整全景相机高度,既避免了受限高交通设施限制又提高了相机的适应性。通过脉冲信号触发方式实现了组合惯导系统与全景相机的时间硬同步,节省了数据处理的时间。下一步考虑在对数据采集的触发控制方式上加入距离触发方式,数据采集设备与在车轮上安装的编码器或车辆自带的里程计进行连接实现通过车辆行驶一定距离进行影像数据与位置坐标数据、姿态数据的采集、同步,使得所采集的数据更加均匀,效果更好。
[1] 孙红星.差分GPS/INS组合定位定姿及其在MMS中的应用[D].武汉:武汉大学,2004.
[2]周落根,韩聪颖,王星卓.移动测量系统及实景三维技术的发展与应用[J].测绘信息与工程,2003,28(1):33~34.
[3]李海亭,张淼,彭清山.城市地理信息系统中的全景地图技术研究.城市勘测[J].2011(3):40~41.
[4] 易延光,黄洪彬.车载移动测量系统的构成与应用.黑龙江水利科技[J].2011(3):284~285.
[5]周忠谟,易杰军,周琪.GPS卫星测量原理与应用[M].北京:测绘出版社,2002.
[6] 汤国安,赵牡丹.地理信息系统[M].北京:科学出版社,2000.
[7]王万峰,杜明义.可量测实景影像在城市部件管理中的应用[J].北京建筑工程学院学报,2009(2):31~34,59.
[8]董绪荣,张守信,华仲春.GPS/INS组合导航定位及其应用[M].长沙:国防科技大学出版社,1998.
猜你喜欢
智能建筑电气技术(2022年2期)2022-02-06
家庭影院技术(2020年11期)2020-12-28
中国电业与能源(2020年7期)2020-08-18
红土地(2019年10期)2019-10-30
测控技术(2018年2期)2018-12-09
英美文学研究论丛(2018年1期)2018-08-16
北京航空航天大学学报(2018年1期)2018-04-20
能源(2017年11期)2017-12-13
中国惯性技术学报(2017年1期)2017-06-09
家庭影院技术(2017年12期)2017-02-06
