
虚拟果园视频跟踪系统的设计与实现
2014-02-06 03:45:15刘可可
浙江农业科学 2014年11期
刘可可
(南京农业大学工学院,江苏南京 210031)
虚拟果园视频跟踪系统的设计与实现
刘可可
(南京农业大学工学院,江苏南京 210031)
为提高果园设施的安全性,避免浪费不必要的人力和财力,设计开发了一套可对果园进行实时监控的视频跟踪系统。该系统通过将金字塔Lucas-Kannade算法与背景差分法融合,实现了对运动目标位置、速度和大小的提取。然后利用电子邮件将运动目标的信息发送给客户端,并将运动目标的图像实时同步至云空间,是一套具有较高实时性与鲁棒性的虚拟果园视频跟踪系统。
视频跟踪;虚拟果园;运动检测
作为机器视觉的重要组成部分,视频跟踪系统就是通过各种传感器(光、电、磁、声等)获得的图像序列,对目标进行自动提取和跟踪的系统,目前已在军事和民用上得到了广泛应用。在军事中,视频跟踪系统在导弹飞机等目标的预警、精确制导武器、火控系统、无人机系统中起着至关重要的作用。在民用方面,它可用于社区、大型公共场所及重要设施的安全监控;智能交通系统中,它可用于无人驾驶系统设计,监控车流量、车速等。此外,视频跟踪技术在视频会议、视频分析、视频检索、基于视频的运动分析和合成、基于运动信息的身份识别、机器人、图像检索、水文观测、港口管理、医学图像分析,以及远距离测量、零部件质量检测等许多领域也都大有作为。
随着农业人口的减少和果园等农业用地的集成化和规模化,国内农业的智能化水平得到了巨大的发展和提高。由于农业人口减少,果园的安全问题变得日益突出,比如果园里时常发生偷盗行为和火灾。如果通过人为地看守果园,将浪费大量的人力物力,而且人为看守也不适用于大规模的果园。本文利用OpenCV软件技术、图像预处理技术(包括高斯滤波和二值形态学滤波)、HS光流算法、金字塔LK光流算法、背景差分法等,开发了一种基于光流法和背景差分法的虚拟果园视频跟踪系统,以期解决这一问题。
1 系统的总体设计与实现
该系统的硬件平台包括:装有Windows 7系统的计算机一台,USB摄像头一个。软件平台为带有OpenCV2.4.4库的Visual Studio 2010及百度云同步软件。
该系统可实现光流法和背景减法的融合,并最终实现3个功能:运动目标属性显示功能(包括运动目标的位置、速度和大小的显示);邮件发送功能,即将运动目标的属性通过邮件进行实时传输;图像共享功能,即将带有运动目标的图片存储在计算机上,并在云端实时共享(图1)。

图1 金字塔LK法与背景差分法的融合结构
2 系统详细设计
虚拟果园视频跟踪系统的详细设计结构如图2所示。
2.1 视频预处理模块
主要用于初始化变量,捕捉视频的当前帧和历史帧,为捕捉到的图像帧分配内存然后将其转化为灰度图,并且为背景减法模块中的历史帧进行高斯滤波。
利用cvCaptureFromFile函数打开视频,并将前帧复制存储下来,变量名改为pFrameA,作为后面运算的历史帧;同时为图像和矩阵分配内存空间,将历史帧转为灰度图pBk Img与pFrImg,并将当前帧和历史帧转化为灰度图imgA与imgB,其中pBk Img与pFrImg用于背景差分法的计算,imgA与imgB用于光流法的计算。
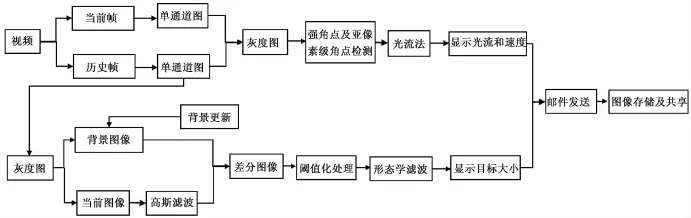
图2 虚拟果园视频跟踪系统的详细设计结构
2.2 角点检测模块
用于检测历史帧中感兴趣的点,即强角点。然后根据强角点检测亚像素级角点。
2.3 光流法模块
在该模块中,我们比较了两种典型的光流算法:HS光流法和金字塔LK光流法。前者代表了稠密光流法,后者则是稀疏光流算法的代表。其性能对比结果如表1所示。

表1 HS光流法与金字塔LK光流法的比较
从表1可以看出,HS光流法计算的光流点数为76 800,即320×240图像中所有的点;而金字塔LK光流法只需要计算500个角点即可,所以金字塔LK光流法的运算量小,实时性更高。HS光流法显示的光流为40,而金字塔LK光流法显示的光流为112,说明LK算法能提取更多的运动点,这样最后算出的平均光流(约等于目标速度)误差也会更小。HS光流法的光流数值标准差为10.70,而金字塔LK光流法光流数值的标准差为2.27,说明金字塔LK光流法的光流数值浮动较小,更稳定。综上,金字塔LK光流法比HS光流法具有更高的实时性和鲁棒性。
通过程序演示发现,HS光流法的速度太慢,容易引起计算机死机,且无法实时处理视频,该算法只能应用于图像研究,而且该算法生成的光流噪点较多,无法代表物体运动的真实速度。图3为HS光流法与金字塔LK光流法的效果图。从图3中可以看出,HS光流法中的光流大小的离散程度较大,而金字塔LK光流法中光流的大小离散程度较小,基本上稳定在10左右,由此可见金字塔LK光流法能更加真实地反映运动目标的速度。因此,在虚拟果园视频跟踪系统中,选择使用金字塔LK光流法来实现光流法模块。

图3 HS光流法与金字塔LK光流法的效果
2.4 光流显示模块
通过查找发生运动的光流点,对光流进行显示。
2.5 背景差分模块
利用背景帧和当前帧的差分图分离出前景,并且阈值化得到二值图,然后对二值图进行形态学滤波。
2.6 运动属性显示模块
首先利用光流值的平均数计算出运动目标的速度,利用前景图计算出运动物体面积;然后将速度小于某个值或面积小于某个值的点的速度和面积置为0,以消除摄像机或者背景抖动带来的影响;最后显示运动目标的速度和大小。
2.7 邮件发送模块
利用SMTP协议和邮箱建立连接。当检测到有目标运动时,每隔一定的时间将采集到的运动目标的信息实时发送给目标邮箱。
2.8 图像共享模块
先将运动目标图像存储在本地文件夹中,存储频率可以自行设置,本研究中使用的存储频率为10帧,即当有目标运动时,每隔10帧保存一次图片。然后将存储在本地的图片通过同步软件在云端实时同步。
3 小结
果园经常会出现偷盗行为和火灾等情况,如果人为看守将浪费不必要的财力,而且人眼的可靠性并不高。如果用视频跟踪系统对果园进行实时监控,则有利于提高果园设施的安全性,而且可以避免不必要的人力和财力浪费。传统的视频跟踪系统只能判断视频中有无运动目标出现。本研究利用金字塔光流法和背景减法进行融合,成功提取了目标的位置、大小和速度,并加入了邮件发送和云同步功能,使果园主人能随时随地掌握果园的信息。此外,该系统也解决了视频跟踪系统鲁棒性和实时性不高的问题。
[1] 刘雅坤,王艳红.科技启迪未来[J].世界汽车,2013(5):42-43.
[2] 张秀丽.四足机器人节律运动及环境适应性的生物控制研究[D].北京:清华大学,2004.
[3] 卢晓鹏.视频序列中目标跟踪技术研究[D].北京:中国科学院研究生院,2007.
[4] 侯杰.基于视频图像的高大空间建筑火灾探测研究[D].北京:清华大学,2010.
[5] 黄琛,丁晓青,方驰.一种鲁棒高效的人脸特征点跟踪方法[J].自动化学报,2012,38(5):788-796.
[6] 张建仓,杨哲辉,孙启富.基于二自由度云台的目标跟踪系统设计[J].计算机测量与控制,2013,21(9):2579-2581.
(责任编辑:高 峻)
TP 391
A
0528-9017(2014)11-1774-03
文献著录格式:刘可可.虚拟果园视频跟踪系统的设计与实现[J].浙江农业科学,2014(11):1774-1776.
2014-06-18
刘可可(1991-),女,山东枣庄人,本科在读,所修专业为电子信息科学与技术。E-mail:849495892@qq.com。
猜你喜欢
导航定位学报(2022年5期)2022-10-13 08:35:28
环球时报(2022-09-19)2022-09-19 17:19:22
Contemporary Social Sciences(2021年5期)2021-11-22 10:38:10
少儿美术(快乐历史地理)(2019年2期)2019-06-12 08:43:06
电光与控制(2018年10期)2018-10-13 08:19:00
童话世界(2017年11期)2017-05-17 05:28:25
科技创新与应用(2017年8期)2017-04-26 21:57:41
软件导刊(2016年12期)2017-01-21 15:17:04
光学精密工程(2016年2期)2016-11-07 09:02:26
现代电子技术(2014年14期)2014-07-24 18:12:33
