
离网型斯特林异步发电技术研究
2014-01-16 05:57范伟成彭小方庄圣伦金永星黄文新
电子设计工程 2014年13期
范伟成 ,彭小方 ,庄圣伦 ,金永星 ,黄文新
(1.上海热气机工程技术研究中心 上海 201203;2.南京航空航天大学 江苏 南京 210016)
斯特林发动机是一种外燃式封闭循环往复活塞式热力发动机。与内燃机相比,斯特林发动机具有燃料适应范围广、噪音低、维护保养费用低、输出功率稳定等特点[1]。异步发电机具有坚固耐用,高可靠性,制造成本低,控制装置简易等优点。异步发电机在离网独立发电时需要吸收感性无功用以励磁,一种方法是在异步发电机的输出端并联电容以提供无功励磁[2],但存在动态响应差,容易引起电压瞬变和电流冲击等特点而缺乏实用意义;另外一种常用方法是采用静态无功发生器为异步发电机提供励磁[3],虽然能大大改善系统的稳态性能和动态性能,但会使系统的体积与重量增加或者注入谐波等。近年来,采用电力电子技术控制异步发电机获得了成功的工程应用[4-5],得到了高品质的电能,但主要应用领域为风力发电与水力发电。斯特林发动机在起动时一般都需要外力驱动才能形成工作循环,采用电力电子技术控制异步发电机,既可以解决斯特林的起动问题,又可以为异步发电机提供无功励磁发电,实现起动/发电双功能,使系统结构简单、可靠,成本也较低。
因此,本离网型发电系统以斯特林发动机为原动机,笼型异步电机为发电机,通过三相PWM全桥变换器实现系统的起动与发电控制。在起动时采用端电压补偿的V/f控制技术,由DC-DC模块控制蓄电池充放电,并通过发动机和发电系统之间的通讯实现系统的能量管理,使系统安全可靠运行。
1 系统设计
基于电力电子技术对异步发电机的控制方式一般有两种[6]:串联结构模式和并联结构模式。并联结构模式是通过调节无功来稳定发电机的端电压,能够直接输出有功到负载上,系统容量较小;串联结构模式适用于风力发电等转速变化较大的场合,系统容量较大,对于起动/发电双功能系统更适合。斯特林发动机发电时速度变化范围虽然较小,但要求起动/发电双功能,因此选用串联结构模式,整个系统结构如图1所示。
三相PWM变换器与异步发电机输出端相连接,主功率电路为三相逆变桥。起动状态时,三相PWM变换器逆变运行,驱动异步发电机处于电动运行状态,拖动斯特林发动机平稳起动;发电状态时,三相PWM变换器为PWM整流工作状态,为异步发电机提供无功励磁,输出有功功率至直流母线,实现功率双向流动。

图1 系统结构图Fig.1 System structure
蓄电池组采用26节12 V、100 AH蓄电池串联,通过DCDC模块连接到母线上。在稳态过程中,DC-DC模块控制蓄电池充放电以保持母线电压恒定,而在动态过程中,即突加突卸负载时刻,为了防止蓄电池的过放,母线电压可以有一定程度的波动。
系统控制器以DSP为控制核心,完成斯特林发动机、异步发电机、蓄电池和负载的状态检测和控制,并通过通讯功能调节斯特林发动机的功率输出以满足电气系统及负载的功率需求。系统将对电能输出、蓄电池充放电、负载用电进行有效的监控,实现能量的最佳利用。
2 系统控制策略
2.1 系统起动控制策略
系统起动过程采用端电压补偿V/f控制策略。斯特林发动机起动时必须充入一定压力的工质气体实现正常运转,加压之后转动惯量很大,启动不易,且点火后随着缸内温度的上升,在高转速电动运行时异步发电机会出现震荡现象。严重的电机震荡将会导致电机相电流过流,因此必须加以抑制,其控制如图2所示。
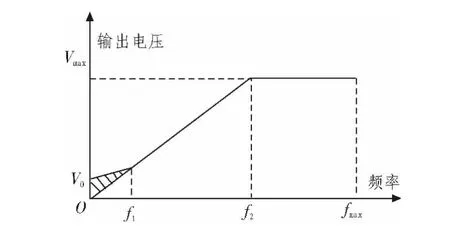
图2 系统起动控制V/f曲线图Fig.2 System start-up control V/f curve
异步发电机拖动斯特林的电动目的在于实现斯特林循环。在起动过程中,开环给定初始电压V0和定子频率f以确保足够大的起动力矩。当转速上升,转子频率达到f1时,发动机开始产生振荡现象,振荡原因是由于发动机缸内加热后,出现了周期性的机械负载变化,而开环调节过程无法让电磁转矩有效跟随转速波动,这种现象在低转速时体现不明显,而随着转速的上升呈递增趋势。因此控制系统在转子频率达到f1后进入转速闭环调节过程。通过合理的PI调节器设计,抑制转速波动,此后发动机转速平稳上升。当电机转速升高至额定转速且缸内温度达到发电要求后,发动机闭合短路阀门,电机进入闭环控制状态。
2.2 蓄电池管理策略
本系统变换器的直流母线电压设计为600 V以提高网侧逆变器的效率,而蓄电池充放电电压为346 V~462 V之间。控制蓄电池充电或放电的大小本质上是控制加在蓄电池两端端电压的大小,因此对蓄电池的管理采用降压变换器,即Buck变换器,如图3所示。
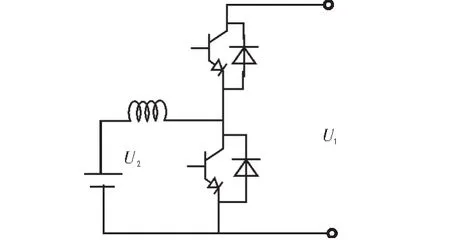
图3 Buck拓扑Fig.3 Buck topology
桥臂上下管互补导通,U1为母线,U2为蓄电池端,电路工作在连续电流模式。当上管导通,下管关闭时,母线通过电感向蓄电池充电,电感储备能量。而当下管导通,上管关闭时,电感中电流需通过下管反向并联二极管续流,电感两端承受反向蓄电池电压并释放能量。通过调整开关管占空比,可以改变蓄电池的充电电压。在系统起动过程中,蓄电池对外放出能量,此时DC-DC桥臂对蓄电池采用母线电压闭环控制。而当系统进入发电状态的时候,蓄电池组大部分时间均工作在充电状态,充电能量的多少则通过调节发动机发出的功率实现。在动态过程中,即突加突卸负载的瞬间,由于发动机功率不能突变,主要由蓄电池充放平衡系统瞬态功率。此时需要对蓄电池做必要的保护措施,防止过充过放。
2.3 功率控制策略
功率控制是发电系统稳定运行的关键。要兼顾发电机输出功率大小,蓄电池状态以及负载三者之间的关系,以便对发电系统的功率流动做统一管理。
系统控制基于功率平衡原则。由于斯特林发动机能量调节缓慢(功率增大和减小需要数分钟调节时间),无法适应负载突变的过程,因此蓄电池组在发电过程中除了进行储能之外,在负载突变的过程中需要吸收或放出能量,对发动机功率调节起到缓冲作用。稳态运行时,控制异步发电机输出功率跟随转斯特林发动机速功率曲线,DC-DC桥臂控制维持蓄电池荷电量控制在90%左右。动态过程中,当负载突加时,DC-DC桥臂控制蓄电池对外放电,维持母线电压保持不变,发电系统控制器通讯要求发动机控制器增大输出功率直至系统达到新的平衡,DC-DC桥臂再次开始对蓄电池充电。负载突卸时与突然加载情况类似,但由于蓄电池短时间内充电电流不能过大,所以应限制蓄电池瞬时充电功率,当突卸负载时应迅速关闭斯特林发动机的燃料供应,并采用电机升频保护措施。尽管斯特林发动机余热仍然会对外持续做功,但是在上述措施之下,其对外输出的能量减少迅速,系统依然能维持母线电压恒定。系统运行模式真值表如表1所示。

表1 系统运行模式真值表Tab.1 System operation mode truth value
表中“1”对斯特林发动机表示是原动机状态,对异步发电机表示发电状态,对蓄电池处于放电状态;“0”表示均处于停止工作状态;“-1”对斯特林发动机表示是异步发电机的负载状态,对异步发电机表示是电动状态,对蓄电池表示充电状态。
3 系统仿真分析
3.1 异步发电机仿真模型
在两相静止坐标系下的异步电机状态方程[7]为:

其中,id1、iq1、id2、iq2为两相静止坐标系下的定转子相电流,RS、Rr为定转子每相等效电阻,Ud、1Uq1为定子电压, LS、lr为定转子每相等效电感,ω为转子电角速度Lm为互感。可以采用状态空间模块来建立异步发电机的模型,状态空间模块公式为:

其中A、B为式(1)中的两个矩阵,C为单位阵,D为零阵。
3.2 仿真结果
实际使用的异步发电机具体参数如表2所示。
在异步发电机仿真模块中输入异步发电机各参数,得到相电压为互差120°的正弦波,如图4所示,其中图(a)为相电压建立波形,图(b)为稳定时相电压波形。仿真结果表明,采用三相PWM变换器能够完成异步发电机励磁工作且电能质量较好。
4 系统应用情况
本文所设计的离网型斯特林异步发电系统在国家海洋局的科研示范项目上获得了应用。所用的斯特林发动机的型号为4R90GZ,系统负载为海水淡化装置。
发电系统在应用现场运行时,蓄电池组始终挂在三相PWM变换器直流母线上,因此母线在建压过程中保持在稳定的数值。系统起动时母线开始建压,蓄电池组开始放电,系统控制器给定异步发电机定子频率,发电机的磁通随电机端电压幅值的抬升逐渐增大,直至平稳建压,如图5所示。与图4(a)的仿真波形基本一致,说明系统设计正确,异步发电机工作正常。
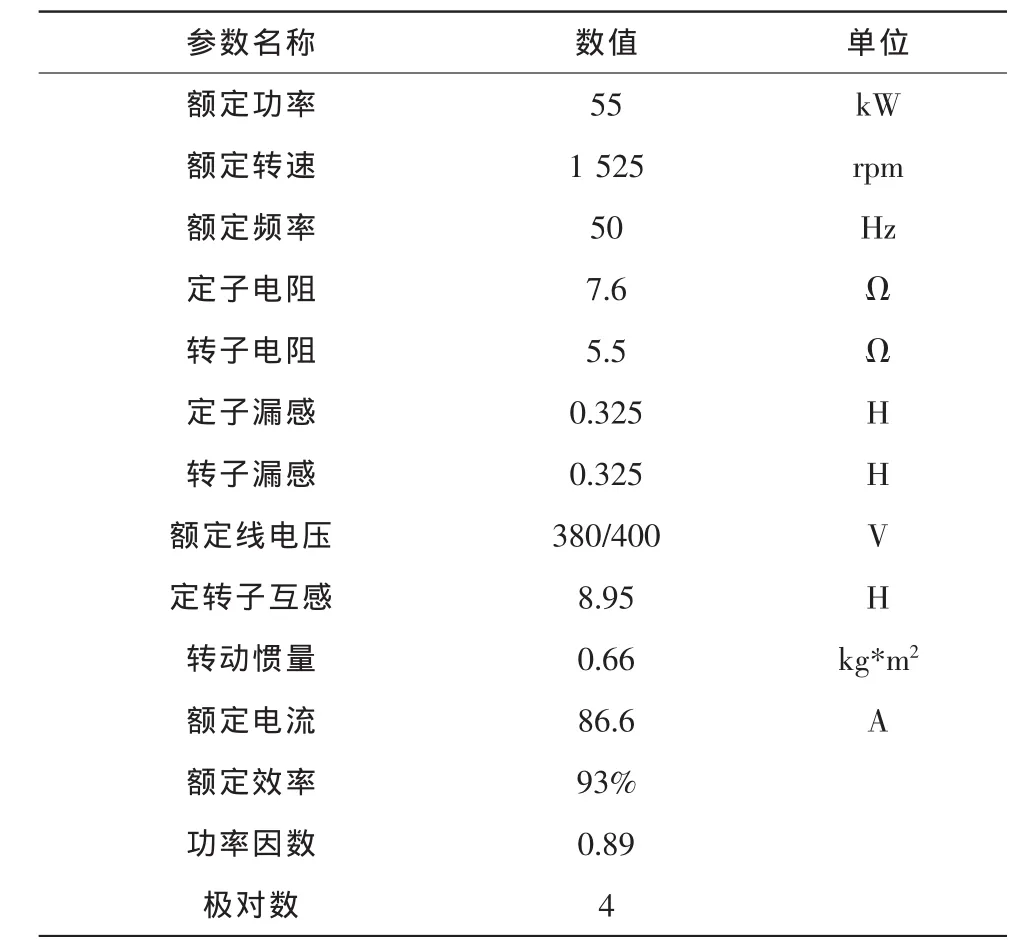
表2 异步发电机参数Tab.2 Asynchronous generator parameters
在现场应用中,系统发出的电能主要用于海水淡化,淡水需求的变化带来负载突增突卸的变化。图6、图7分别表示突加突卸负载时系统状态。负载突增时,由于斯特林功率变化较慢,导致母线电压下降,此时蓄电池组放电,维持母线电压稳定。如果海水淡化负载突然卸载,导致母线电压上升,控制蓄电池充电,降低母线电压,同时降低斯特林发动机的输出功率。维持系统功率平衡,其过程如图7所示。由图分析可知:在负载突变时,系统母线电压波动幅值在1%左右,基本不变,且持续时间很短:约700 ms,说明系统负载功率跟随性能良好,系统响应迅速。
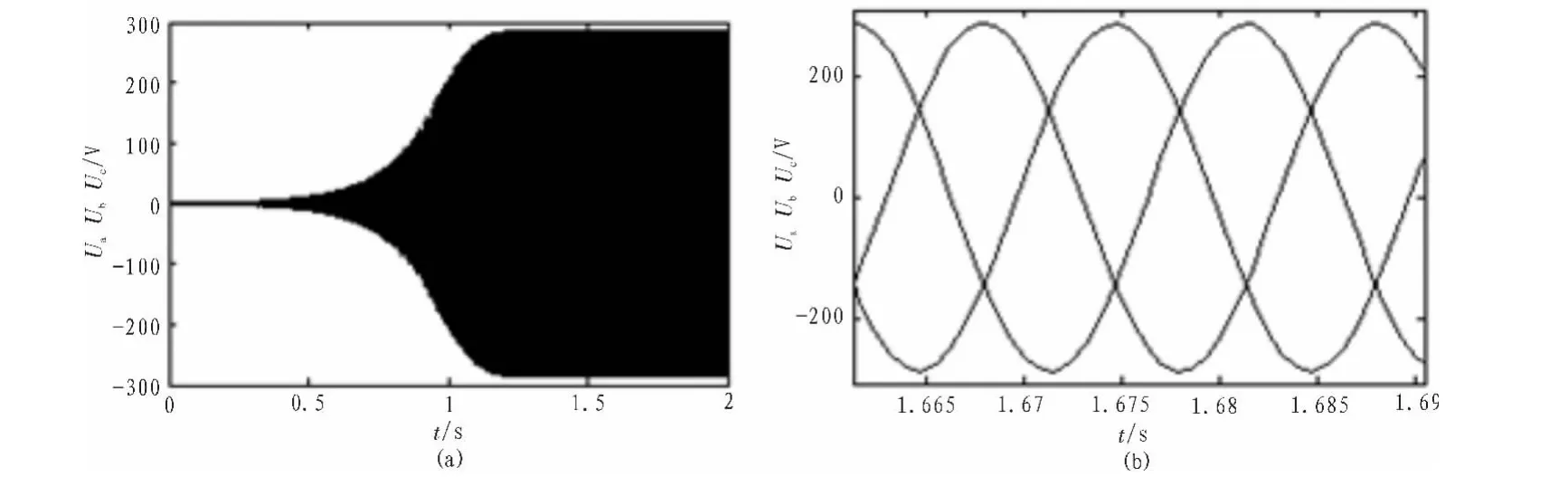
图4 异步发电机电压仿真波形Fig.4 Asynchronous simulation waveform generator voltage
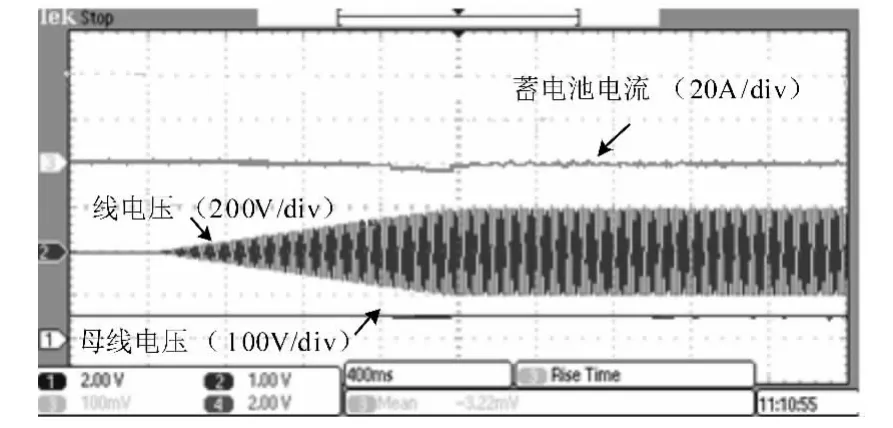
图5 系统相电压建压波形Fig.5 Build pressure waveform phase voltage system
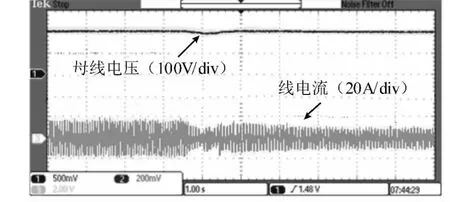
图6 负载突加电压电流波形Fig.6 Sudden load voltage and current waveforms
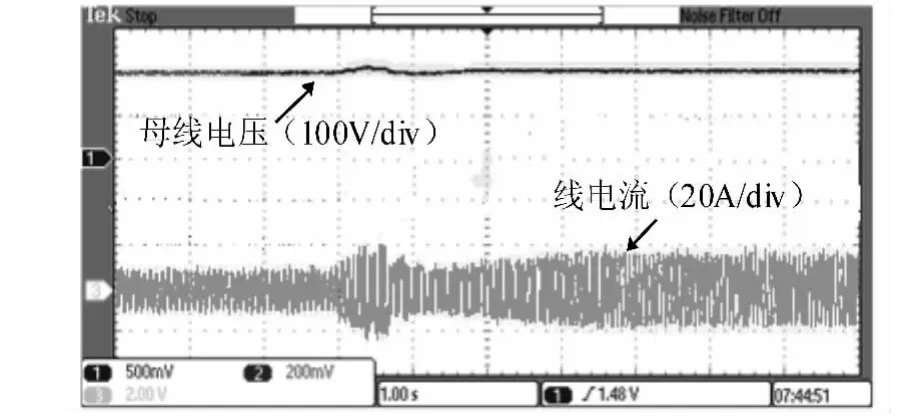
图7 负载突卸电压电流波形Fig.7 Unload the load voltage and current waveforms
5 结论
1)采用串联结构的异步发电技术实现了斯特林的离网发电的起动/发电双功能,实现了其离网独立发电功能,扩大了斯特林发动机的应用范围。
2)系统起动时采用带端电压补偿的V/f控制技术实现了平稳起动,简单可靠,采用DC-DC模块完成蓄电池管理控制,依据功率平衡原则实现系统的能量流动管理,当负载突变时系统功率跟随性能良好,响应迅速,安全可靠。
3)建立了异步发电机的仿真模型,仿真结果与实际示范应用一致,证明本方案的正确性和可行性,具有一定的设计参考价值。
[1]金东寒.斯特林发动机技术[M].哈尔滨:哈尔滨工程大学出版社,2009.
[2]CHAN T F.Capacitance requirements of self-excited induction generators[J].IEEE Trans on EC,1993,8(2):304-310.
[3]Arrilaga J,Watson D B.Static power conversion from selfexcited induction generators[J].Proc.Inst.Elec.Eng.,1978,125(8):743-746.
[4]刘陵顺,胡育文,黄文新.电力电子变换器控制的异步电机发电技术[J].电工技术学报,2005,20(5):1-7.LIU Ling-shun,HU Yu-wen,HUANGWen-xin.Summary of technology of induction generators with power electronic converters[J].Transctions of China Electrotechnical Society,2005,20(5):1-7.
[5]E1baluk M E,David Kankam M.Potential starter/generator technologies for future aerospace application [J].IEEE AES System Magazine,1997,12(5):24—31.
[6]黄文新,胡育文.笼型异步发电机的电力电子控制技术[J].电工技术杂志,2001(3):1-4.HUANG Wen-xin,HU Yu-wen.Overview on control technique of cage induction generator power electronic[J].Electrotechnical Journal,2001(3):1-4.
[7]黄文新,胡育文.笼型异步发电机的MATLAB的仿真模型[J].中小型电机,2002,29(1):1-3.HUANG Wen-xin,HU Yu-wen.Matlab simulation module of asynchronous generator[J].S&M Electric Machines,2002,29(1):1-3.
猜你喜欢
房地产导刊(2020年11期)2020-12-28
小哥白尼(军事科学)(2020年8期)2020-05-22
国际汉学(2020年1期)2020-05-21
山东电力高等专科学校学报(2019年5期)2019-11-01
NBA特刊(2018年17期)2018-11-24
课程教育研究·学法教法研究(2018年20期)2018-08-11
自动化与仪表(2018年7期)2018-07-31
中国设备工程(2017年24期)2017-12-28
汽车维修与保养(2017年1期)2017-05-15
汽车维修与保养(2016年1期)2016-09-07
