
基于EKF的脉冲星导航在转移轨道的应用
2014-01-16 05:56孙永明曾宪武
电子设计工程 2014年6期
钟 敏,刘 劲,孙永明,曾宪武
(武汉科技大学 信息科学与工程学院,湖北 武汉 430081)
目前,深空探测器一般利用地面站的支持进行导航[1]。该导航方式无法满足高精度,实时性的要求。深空探测器自主导航技术[2]无需地面站支持,便可实现深空探测器的导航。近些年来,国外已经提出或研发了不少深空探测器自主导航系统,包括:全球定位系统[3]、地磁导航系统[4]、天文导航系统[5]以及X射线脉冲星导航系统等。全球定位系统、地磁导航系统、天文导航系统这些导航系统只能在地球附近提供导航信息,无法为深空探测器提供高精度导航信息[6]。
X射线脉冲星自主导航是利用脉冲星的辐射信号进行深空探测器自主导航。脉冲星[7]是一种高速自转的磁中子星。它对外不断辐射出唯一的、及其稳定的、具有可预见性的脉冲信号。脉冲星可在射电、红外、可见光、紫外、X射线和γ射线等波段进行信号辐射。能够辐射X射线的脉冲星被称之为X射线脉冲星。由于X射线波段集中了X射线脉冲星的绝大部分辐射能量,易于实现探测设备小型化。因此,利用X射线脉冲星进行深空探测器自主导航是可行的。
X射线脉冲星导航的优点如下:1)它不对外辐射能量,是一种完全被动的导航方式;2)它能为整个太空中的深空探测器提供高精度的位置信息,适用于整个太空;3)它不易受到敌方干扰;4)它的导航定位精度较高,并且与时间无关。
鉴于X射线脉冲星导航具有以上优点,目前,不少国家开始制定关于X射线脉冲星导航的研究计划。2004年初,美国国防部国防预先研究项目局提出了“基于X射线源的自主导航定位验证”计划。同年,欧洲空间局也开展了X射线脉冲星导航可行性的论证工作[8]。
我国的航天事业发展十分迅速,探月工程开展得如火如荼。下一步拟开展火星探测计划。但是,航天器自主导航能力是制约我国开展火星探测的一个瓶颈。因此,实现X射线脉冲星导航对我国航天事业具有重要意义。
本文拟利用扩展Kalman滤波器(Extended Kalman Filter,EKF)作为导航滤波器,以火星探测任务为研究背景,研究一种基于EKF的X射线脉冲星导航系统。
1 数学模型
1.1 状态方程
选取日心惯性坐标系(J2000.0)。通常选用的深空探测器自主导航系统的轨道动力学模型作为状态模型。其表达式为

式(1)可简化为:

其中,状态矢量 X=[x,y,z,vx,vy,vz]T。 [x1,y1,z1]和[x1,y2,z2]分别为火星和地球的位置矢量。μs,μm,μe分别为太阳,火星和地球的重力加速度。rps,rpm,rpe分别是深空探测器到太阳,火星和地球的距离。rsm,rse分别是太阳到火星和地球的距离。ω为状态转移噪声。
1.2 观测方程
由于X射线脉冲星辐射信号具有唯一性、周期性等特征,所以基于X射线的深空探测器自主导航定位才成为可能。可以在惯性坐标系下,实现深空探测器自主定轨。以SSB(Solar System Barycenter)为坐标原点,估计深空探测器相对于SSB的位置。
X射线脉冲星导航系统的基本原理图如图1所示。X射线脉冲星导航将脉冲到达深空探测器时间t与到达SSB时间tb之差作为基本量测量。脉冲到达SSB时间是利用脉冲星计时模型预报获得,脉冲到达深空探测器的时间则需通过X射线探测器观测得到。r是深空探测器相对于SSB的位置矢量,c为光速,n是脉冲星的方位矢量。则深空探测器在脉冲星视线方向上的距离为c(tb-t),可以看作r在n上的投影,如式(3)所示。

考虑到广义相对论的影响,上式可进一步修正为式(4):
其中,b为SSB相对于太阳的位置矢量,D0为脉冲星到太阳系质心的距离,μSun为太阳引力常数。
2 EKF滤波器
Kalman滤波器是解决线型估计问题的利器。但是,在深空探测器自主导航领域中,测量模型和轨道动力学模型是非线性的。为了利用传统的Kalman滤波器解决非线性问题,Stanley Schmidt提出了一种扩展 Kalman滤波器(Extended Kalman Filter,EKF),并将其应用于Apollo登月计划中的轨道估计问题,取得了较好的效果。
下面介绍EKF的滤波流程[6]:

图1 脉冲星导航Fig.1 Pulsar navigation
系统方程和量测方程具体如下:

初始化滤波器步骤具体如下:

当k=1,2,…,按如下式子运行:
1)计算以下线性化矩阵:

2)计算状态估计的估计误差的协方差矩阵和时间更新:

3)计算以下线性化矩阵:

4)计算状态估计的量测更新和估计误差协方差矩阵:

3 仿真实验
文中首先给出仿真条件。以美国“Mars Pathfinder”任务为例。轨道参数如表1所示。仿真时间从Mar 1st1997 00:00:00.00 UT到Mar 2nd1997 00:00:00.00 UT。X射线探测器有效面积为 1 m2。 采用 PSR B0531+21,B1821-24,B1937+21作为导航X射线脉冲星。EKF滤波器参数如表2所示。
图2和图3给出了基于EKF的X射线脉冲星导航定位和定速性能,仿真时间为24小时。从图2和图3可以看出,X射线脉冲星导航系统能有效收敛。经过一段时间后,即可获得高精度的定位和定速信息。由于滤波周期为5 min,导航系统需经过约2 h才能基本收敛。经过12 h后,滤波器精度逐渐趋于稳定,精度也进一步得到提高。

表1 初始轨道参数Tab.1 Initial orbital elements

表2 EKF滤波器参数Tab.2 Parameters of EKF

图2 位置估计误差Fig.2 Position estimation error

图3 速度估计误差Fig.3 Velocity estimation error
本文进行了100次Montè-Carlo实验。仿真结果如表3所示。
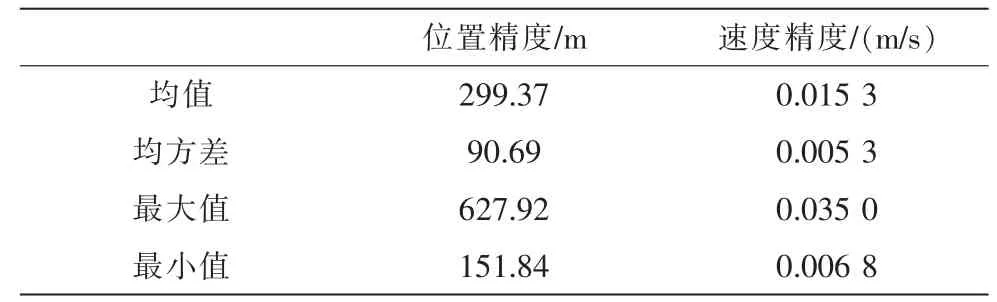
表3 仿真结果Tab.3 Simulation results
从表3可以看出,该导航方式具有较高的定位精度和定速精度,均方差较大。但是即使误差取最大值时,定位精度也在700 m以内,速度精度在0.04 m/s以内,该导航方式也完全能满足深空探测任务的要求。
4 结 论
针对深空探测器转移轨道,提出了一种基于EKF的X射线脉冲星导航系统。该导航方法以脉冲到达时间为量测量,以扩展Kalman滤波器为导航滤波器。以火星转移轨道为例进行仿真实验,仿真结果表明了该导航系统的定位精度较高。因此,该导航方式适合于深空探测。该方法可为我国未来的火星探测任务提供一种可行的导航方案。
[1]Jordan JF.Navigation of spacecraft on deep space missions[J].The Journal of Navigation,1987,40(1):19-29.
[2]Gouley R,White R,Gai E.Autonomous satellite navigation by stellar refraction[J].Journal of Guidance, Control, and Dynamics,1984,7(2):129-34.
[3]Yoon JC,Lee B S,Choi K H.Spacecraft orbit determination using GPS navigation solutions[J].Aerospace Science and Technology 2000,4(3):215-21.
[4]Zhou J,Ge Z L,Shi G G,et al.Key Technique and Development for Geomagnetic Navigation [J].Journal of Astronautics,2008,29(5):467-72.
[5]Ning X L,Fang JC.Spacecraft autonomous navigation using unscented particle filter-based celestial/Doppler information fusion[J].Measurement Scienceand Technology,2008,19(9):1-8.
[6]刘劲.基于X射线脉冲星的航天器自主导航方法研究[D].武汉:华中科技大学,2011.
[7]Hewish A,Bell S J,Pilkington J D H.Observation of a rapidly pulsating radio source[J].Nature,1968(217):709-13.
[8]Sala J,Urruela A,Villares X,et al.Feasibility study for a spacecraft navigation system relying on pulsar timing information[R].ARIADNA Study 03/4202,2004.
猜你喜欢
北京航空航天大学学报(2021年7期)2021-08-13
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年4期)2018-11-25
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
儿童故事画报·自然探秘(2017年2期)2017-09-26
中国惯性技术学报(2017年1期)2017-06-09
雷达学报(2017年1期)2017-05-17
百科探秘·航空航天(2016年9期)2016-12-01
