基于改进型Smith预估器的超临界机组主汽温模糊控制系统
2014-01-16 05:56:58马阳
电子设计工程 2014年6期
马阳
(沈阳工程学院 自动化学院,辽宁 沈阳 110136)
目前,600 MW超临界机组由于其主汽压力和主汽温度较高,提高了机组的热效率和经济性,已逐步成为我国电力行业的主力机组[1]。但主蒸汽温度在实际运行中经常遇到频繁、扰动量大的干扰,且汽温控制对象具有时变性、非线性和大迟延等特点,因此应设计合理的主汽温控制策略,以维持主汽温的稳定,保证机组的安全运行和经济效益。
大型火电机组控制过热汽温应用较为广泛的是串级控制系统,其内回路为快速随动系统,克服内扰的能力较强,但要求主、副调节器的参数必须配合好,才能得到理想的控制效果。由于汽温对象的非线性和时变性,决定了控制器的最佳参数只适合于某一运行工况。当工况发生变化时控制器参数的匹配关系会变得不协调,进而影响控制效果。目前,模糊控制在工业控制中逐步得到应用,模糊控制的鲁棒性和自适应能力较强,能够很好的解决对象模型的不确定性、时变性和非线性问题,但对于汽温对象的大迟延特性无法有效解决。Smith预估控制是克服对象大迟延的常用方法,但Smith预估器对模型的误差十分敏感,鲁棒性差,必须建立对象精确的数学模型才能有效解决时滞问题。
基于以上分析,本文提出了一种改进型Smith预估器对超临界机组主汽温对象惰性区特性进行预估补偿,并将模糊控制理论与经典控制理论结合形成了主汽温综合控制方案。通过仿真研究证明这种汽温综合控制新方案能够很好的克服主汽温对象非线性和滞后性问题,使主汽温控制系统性能有了较大的提高。
1 主汽温综合控制
1.1 超临界机组主汽温基本控制策略及工艺流程
超临界直流锅炉主汽温的控制由两个调节系统实现。一是通过调节燃水比来维持汽水流程中某点的工质温度,对主汽温的进行粗调;二是通过设置二级过热器喷水减温装置,对主汽温的进行细调[2]。
超临界机组主汽温工艺流程图如图1所示。蒸汽经过了水冷壁,一级过热器、屏式过热器和末级过热器等受热面后形成主蒸汽。由于喷水减温调节惯性小、响应快,A、B两侧同时设置两级喷水减温装置,作为细调手段。

图1 主汽温工艺流程图Fig.1 Main steam temperature process flow diagram
该超临界机组喷水减温原控制方案中一、二级减温均采用了串级控制。但串级控制在调试整定过程中存在较大难度,且易造成较大偏差及积分饱和。因此本方案只采用了一个PID调节器,设计了改进型Smith预估器对主汽温对象惰性区特性进行预估补偿,并结合模糊控制理论对PID参数进行在线调整的主汽温综合控制方案。
1.2 主汽温综合控制
1.2.1 改进型Smith预估器的设计
本文设计的改进型Smith预估控制器,通过预估补偿使主汽温惰性区对象等效成一个比例环节,进而减小控制通道的迟延,改善控制品质[3]。
主汽温惰性区特性预估补偿原理如图2所示。
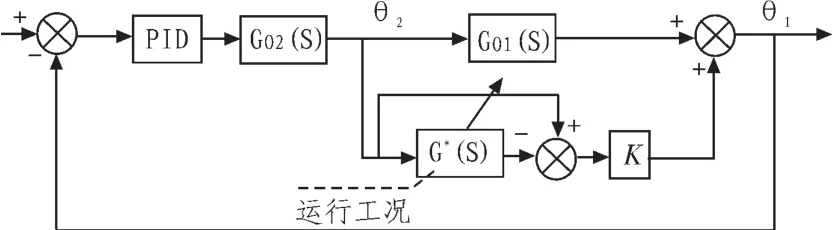
图2 汽温惰性区特性预估补偿原理图Fig.2 Schematic diagram of compensating the inert region character for the steam temperature
补偿后的等效汽温对象传函为:

若要实现汽温动态特性的近似完全补偿,即KG*(S)≈GO1(S)时,则有:

其中θ1为过热器出口蒸汽温度;θ2为过热器入口蒸汽温度;GO1(S)为主汽温惰性区对象特性;GO2(S)为主汽温导前区对象特性;K为惰性区传递函数GO1(S)的放大系数;预估器模型 P(S)=K-GO1(S)。
其等效简化框图如图3所示。

图3 等效简化原理图Fig.3 Equivalent simplistic schematic diagram
由图4可知经过预估补偿后系统等效为一个单回路调节系统,其中导前区特性GO2(S)为一阶惯性环节,等效汽温对象为KGO2(S),控制通道迟延较小,这种调节方式将大大改善调节品质。
1.2.2 PID参数模糊调整
Smith预估控制能够克服对象大迟延,但基于Smith预估器模型 P(S)=K-GO1(S),要想实现完全补偿必须建立对象精确的数学模型,其补偿效果对模型的误差十分敏感,鲁棒性差。而汽温对象的导前区特性也随运行工况而变化,因此其被控对象仍具有非线性和时变性。目前,模糊控制在工业控制中逐步得到应用,模糊控制的鲁棒性和自适应能力较强,能够很好的解决对象模型的不确定性、时变性和非线性问题,本文将模糊控制与PID控制相结合,通过自适应环节对PID控制器参数进行在线调整,实践证明这种调整方法简单易行,提高了控制器的自适应能力。基于改进型Smith预估器的模糊自适应PID控制系统原理示意图如图4所示。

图4 改进型Smith预估器的模糊自适应PID控制系统原理图Fig.4 Schematic diagram of improved smith predictor fuzzy self-adaptive PID control system
2 汽温控制方案仿真研究
2.1 模糊策略
2.1.1 模糊化
将系统误差e和误差变化率ec变化范围定义为模糊集上的论域。根据实际情况,语言变量论域与语言值集合设为:
e=[-3,3];{NB,NM,NS,ZO,PS,PM,PB}
ec=[-3,3];{NB,NM,NS,ZO,PS,PM,PB}
输出分别是:kp,ki,kd,语言变量论域与语言值集合设为:
kp=[-0.2,0.2];{NB,NM,NS,ZO,PS,PM,PB}
ki=[-0.05,0.05];{NB,NM,NS,ZO,PS,PM,PB}
kd=[-2, 2];{NB,NM,NS,ZO,PS,PM,PB}
kp,ki,kd的初始值为:0.3,0,1.0。
根据过热汽温对象的特性,一般可以应用经验归纳法建立 kp,ki,kd的模糊控制规则表[4]如表 1 所示。
2.1.2 模糊推理与反模糊化
根据系统的误差及误差变化率得到相应的语言赋值,3个修正参数Δkp、Δki、Δkd通过表1所示的模糊控制规则可以得到其模糊量,可以采用重心整定法[5]对 Δkp、Δki、Δkd反模糊化处理,得到其精确量。
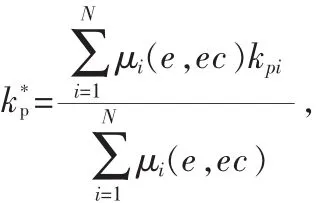

表 1 k p,k i,k d 的模糊规则表Tab.1 Fuzzy rule table of k p,k i,k d
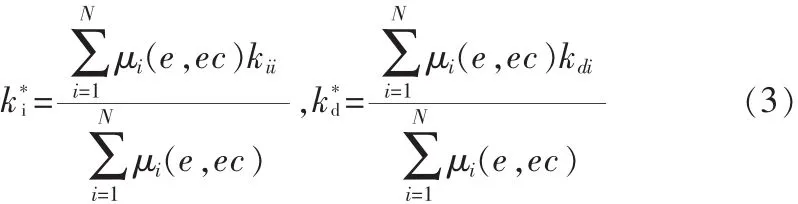
其中 kp、ki、kd为精确输出量;kpi、kii、kdi为输出变量;μ 为模糊集隶属度函数;N为单点集数。应用模糊合成推理,根据各参数模糊控制模型及各模糊子集的隶属度赋值表,得到控制器参数的模糊矩阵表,将求得的修正参数带入下列公式计算,分别得到模糊自适应PID控制器的3个参数为:

在线运行过程中,控制系统通过对模糊逻辑规则的处理、查表和运算,完成对PID参数的在线校正[6]。
2.2 仿真研究及结果分析
2.2.1 汽温对象特性
通过减温水阶跃扰动试验,测得超临界机组主汽温二级减温器的进、出口温度阶跃响应曲线。根据响应曲线估算二级喷水减温系统的惰性区及导前区传递函数为:
Smith预估器模型:

2.2.2 仿真研究及结果分析
根据汽温对象动态特性,按图2搭建系统仿真模型。为了观察改进型Smith预估器模糊控制效果,同时还进行了常规PID和Smith预估器控制的仿真实验,PID控制器参数kp=1.1、ki=0.017、kd=19.8,其仿真结果如图5所示。对比3条仿真曲线,常规PID系统响应速度较快,过渡时间较长并有一定震荡状态出现;Smith预估控制的响应曲线在抑制超调,加快系统调节速度方面有较好的控制效果;模糊Smith控制效果最好,调节时间短且无超调及震荡。
为观察模糊Smith的抗干扰效果,系统在200s的时刻控制作用加入阶跃扰动,仿真结果如图6所示。仿真曲线表明,模糊Smith的抗干扰方面能力是最强的。扰动发生后,控制器参数在较短的时间内进行线调整,系统输出平稳快速的恢复到平衡状态。

图5 系统输出响应曲线Fig.5 System output response curve
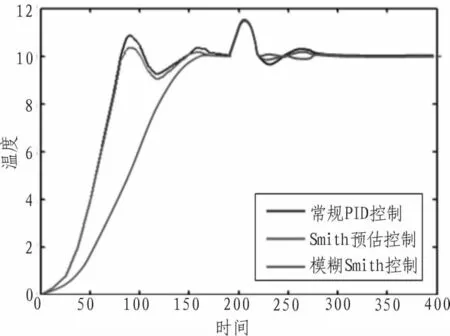
图6 受到干扰后系统输出响应曲线Fig.6 System output response curve after a disturbance
总之,通过系统仿真曲线分析,本文设计的改进型Smith预估器模糊控制器抗干扰能力强,有一定的容错能力,这种汽温综合控制新方案能够很好的克服主汽温对象非线性和滞后性问题,具有良好的快速性、稳定性和鲁棒性,使主汽温控制系统性能有了较大的提高。
3 结束语
超临界机组主汽温对象较为复杂,存在较大迟延、时变性、非线性等特点,常规控制策略很难取得满意的控制效果。本文提出了一种改进型Smith预估器对主汽温对象惰性区特性进行预估补偿,并将模糊控制理论与经典控制理论结合形成了主汽温综合控制方案。通过现场实际采集的历史数据,对系统进行仿真实验,结果表明该方案可以很好地解决主汽温系统的非线性和滞后性问题。
[1]边立秀.热工控制系统[M].北京:中国电力出版社,2002.
[2]魏志,高东杰.超临界直流锅炉主汽温控制[J].微计算机信息,2008(1):17-18,61.WEIZhi,GAODong-jie.Thecontrol of main steamtemperature for supercritical once-through boilers[J].Microcomputer Information,2008(1):17-18,61.
[3]张丽香,王琦.模拟量控制系统[M].北京:中国电力出版社,2006.
[4]刘金琨.先进PID控制及其MATLAB仿真[M].北京:电子工业出版社,2003.
[5]李平,严宇,肖智勇.Smith预估自适应模糊PID在温控系统中的应用研究[J].电气开关,2010(3):39-42.LI Ping,YAN Yu,XIAO Zhi-yong.Application of smith predicted adaptive fuzzy PID control for the temperature control system[J].Electric Switchgear,2010(3):39-42.
[6]李全俊,黄权,李锦.Smith预估模糊自适应 PID控制在时滞系统中的应用[J],兵工自动化,2011(12):49-52.LI Quan-jun,HUANG Quan,LI Jin.Application of smith predicted adaptive Fuzzy-PID controller in time-delay system[J].Ordnance Industry Automation,2011(12):49-52.
猜你喜欢
云南化工(2021年5期)2021-12-21 07:41:20
商品与质量(2018年46期)2018-12-08 06:50:28
东北电力技术(2017年4期)2017-05-17 09:36:44
电力与能源(2017年6期)2017-05-14 06:19:45
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
四川电力技术(2015年5期)2015-12-19 11:04:54
电源技术(2015年11期)2015-08-22 08:50:38
电力建设(2015年2期)2015-07-12 14:15:58