水下无线传感器网络定位技术研究进展
2014-01-16 01:18毕京学张鼎凯段淑珍
导航定位学报 2014年1期
毕京学,郭 英,甄 杰,张鼎凯,杨 凯,段淑珍
(1.山东科技大学,山东 青岛 266500;2.中国测绘科学研究院,北京 100830)
1 引言
水下定位技术是当前海洋开发活动与海洋技术发展的基础。海洋定位技术在海底环境监测、海洋工程建设、海洋资源开发、海洋科学发展以及海洋灾害预警预报与急救等多方面都将发挥极其重要的作用。传统的水声定位设备普遍存在着诸如布设、校准和维护困难,费时耗资,灵活性差,定位精度不理想,作用范围有限,系统标定困难,无法满足特殊工程应用等问题。全球定位系统(global positioning system,GPS)技术、无线传感器网络技术的广泛应用为突破传统水下定位技术的局限提供了充分的可能性。综合了浮标网络技术、水声定位技术以及GPS卫星定位技术的浮标网络定位技术,即水下GPS定位系统,较好地解决了水下运动目标的实时精确定位问题。但在实际应用中,浮标网络技术透露出越来越多的不足。水下无线传感器网络作为陆上无线传感器网络的延伸,由大量廉价微型传感器节点组成,具有自组织性、可靠性高等特点[1-2],低成本、高冗余的设计原则为整个系统提供了较强的容错能力[3],在水环境监测、海洋数据收集、海底探测、灾害预测、搜索救援等方面具有重要应用[4]。
2 浮标网络定位系统
如图1所示,浮标网络定位系统由GPS、浮标网络、水下目标、地面监控中心或测量船组成。浮标内置的GPS 接收机获取位置信息,同时水下目标向浮标基元发出声脉冲信息,然后浮标将自身的GPS位置信息及所接收声波脉冲信息以无线电形式发送到地面监控中心或者测量船上,通过相应的定位算法解算出水下目标的位置信息并发送至浮标,再通过声波脉冲告知定位目标[5-7]。
应用较广泛的是单浮标水下GPS相对定位模型及浮标网络水下GPS长基线定位模型:前者操作简单成本较低,主要应用于定位精度不是很高的情况,文献[8-9]对基于单个GPS浮标的水下相对定位系统的定位算法作了较详细地讨论;后者将传统的水下长基线定位系统“移至”水面,由浮标基元构建长基线,利用空间后方交会实现水下目标的定位[10-11],文献[12]提出了差分GPS水下定位系统的极坐标系下定位的解析表达式,推导了定位结果影响表达式。
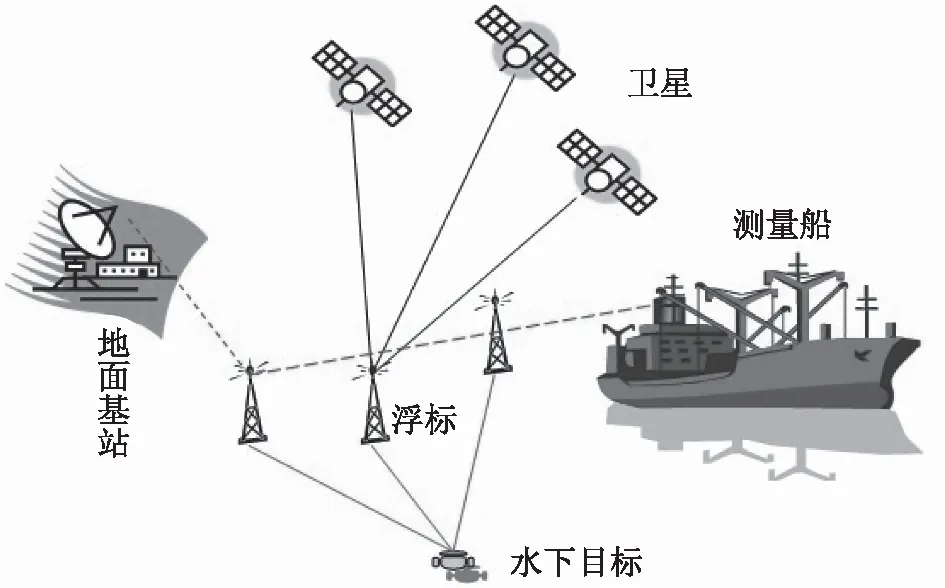
图1 浮标网络系统结构示意图
含有浮标网络的水下GPS定位技术虽然有了长足发展,能够提供满足精度需求的定位服务,但是存在许多不足。
2004-01研制成功的水下GPS高精度定位导航系统,在水深45 m的水域,水下定位精度为5 cm,测深精度为30 cm,水下授时精度为0.2 ms,能够实现水下设备导航和水下目标瞬时水深检测[13]。该系统在水下自动化程度及应用范围等方面达到了当时的国际先进水平,然而其定位相对精度为1/150,只适用于浅水区域。
文献[14]提出了将GPS技术、矢量水听器技术、无线传感器技术、无线网络技术和网络化传感器技术引入传统长基线水下目标定位系统的方法,讨论了测量原理、系统实现及关键技术。网络化传感器技术仅采用声压传感器,构成空间阵列,进行声场空间采样,通过阵列信号处理方法获得波达方向(direction of arrival,DOA)估计,从而计算出目标方位角αi和俯角βi,用于目标定位。文中没有仿真实验,无法评估系统定位和导航的精度。
文献[15]采用了文献[16]中的差分GPS水下立体定位系统浮标姿态测量算法,同时对水声信号作时延测量,利用数字罗盘实时测量浮标的姿态数据,获得实时精确的初始定位信息,从而提高水下定位的精度;湖面试验较文献[13]中定位精度提高,海面试验投放深度为45 m,平面和垂直精度均小于1 m。然而,两次试验均为目标静态测试,且添加了人为测深手段,自动化程度较低,无法用于水下目标动态定位和导航。
综上所述,依靠浮标网络水下GPS定位系统,有以下不足:
(1)系统节点数目少,容错性低,覆盖范围较小;
(2)适于浅水或浅海区域,自动化程度较低;
(3)时延效应没有消除;
(4)只显示了微跟踪能力[17]。
3 水下无线传感器网络
水下无线传感器网络由固定在海底或悬浮在海中的传感器节点组成,节点搭载的传感器负责采集温度、盐度、深度、波高、剖面流量等海洋环境参数,通过声学通信方式传递给水面的基站或船舶,水面设施采用无线电方式传给卫星或互联网,最终发送到用户手中[18]。
如图2所示,传感器节点是将传感器模块、处理器模块、无线通信模块和能量供应模块集成到一体的极小物理单元。这四个模块确保传感器节点与安装有传感器节点的水下设备具有自我配置能力,即通过改变配置、位置和运动信息相互协调,并能向岸上基站播发监测数据。

图2 传感器节点结构示意图
4 水下无线传感器网络定位技术
水下无线传感器网络定位技术能够为传感器获取的数据提供位置信息,增加空间属性,从而更好地服务于海洋环境监测、海洋工程建设和灾害预警等应用。
在水下无线传感器网络定位技术中,网络拓扑结构通常是决定能源消耗、容量和网络可靠性的关键因素。水声信道的物理条件苛刻,具有低带宽、高误码率和传播延迟的特点,传感器节点采集数据和通信过程消耗的电量由电池供应,且不易更换,这就需要对水下无线传感器网络拓扑结构进行精心设计和最优化布设。良好拓扑结构的网络有较高的可靠性和容错性,减少通信冗余,降低通信消耗,避免出现因某个节点的错误信息影响定位精度的情况。与此同时,水中声速为1 500 m/s,易受温度、压力和盐度等影响发生变化,与无线电在空气中传播相比,传播延迟高了5个数量级,因此网络拓扑结构的好坏对系统的性能尤为重要。
这部分主要从网络拓扑结构方面对水下无线传感器网络定位技术进行分类,介绍了系统原理,并从网络拓扑结构和定位算法优化方面叙述了发展现状。按照系统结构可将水下定位系统分为:二维水下传感器网络定位系统和三维水下传感器网络定位系统。
4.1 二维水下传感器网络定位系统
如图3所示,二维水下传感器网络是由水面浮标网络和水下无线传感器网络组成。水面浮标网络接收GPS信号,安装在浮标上的水听器同时接收汇聚节点或者信标发送的声脉冲信息,并将其以无线电形式发送到测量船或地面基站;测量船或地面基站依据算法计算出各个传感器节点的位置。水下无线传感器网络由大量固定在海底的传感器节点和汇聚节点或信标构成,汇聚节点有水平和垂直通信收发器,水平收发器用于向周围传感器节点发送指令和配置信息以及收集传感器节点的监测数据,垂直收发器可以向浮标网络传递数据信息;传感器节点与汇聚节点可直接通信,也可通过多跳传递信息。
水下传感器网络中,对于距离汇聚节点较近的传感器节点,可直接把数据发送给汇聚节点,且这种通信方式简单;对于距离汇聚节点很远的传感器节点,发送数据所需的功率可能要高许多[19],而且高发射率引起水声干涉增多,导致网络容量减少。在多跳路径中,由中间节点负责传递数据,可能会节约能源和增加网络容量,但会增加路由计算的复杂度[20]。所以,在考虑到能源和网络容量的同时,需视情况选择合适的数据通信方式。

图3 二维水下无线传感器网络定位模型
4.2 三维水下传感器网络定位系统
如图4所示,三维水下传感器网络定位系统由水面基站和悬浮在水中的传感器网络组成。悬浮在水中的传感器节点分布在不同深度,用于监测不同深度的数据信息,由中间节点通过多跳方式传递到漂浮在水面的浮标网络,然后将信息以无线电形式发送至地面基站或测量船,解算完毕后发送至用户手中完成测量。当然,含有水下目标(如水下机器人,autonomous underwater vehicle,AUV)的系统里,可保证其与传感器节点通信,实现自主导航与定位。
三维水下传感器网络的传感器节点悬浮在水中,受洋流的影响具有移动性,这就需要考虑到传感器节点的布设密度、感知范围和通信距离。
4.3 发展现状
水下传感器网络定位系统在网络拓扑结构、定位算法优化、水声信道通信、路由计算、能源供应、时间同步等问题上,仍然有许多挑战,国内外研究人员对基于无线传感器网络作了大量研究。
4.3.1 拓扑结构上的研究
文献[20]提到AUV将会从许多方面增强水下传感器网络的功能,并指出需要研究的协同算法领域,譬如自适应采样、自我配置算法等,为后续研究作了准备。文献[21]设想了一个三维水下传感器网络结构,如图5所示,包括漂浮在水面的平台和浮标,固定在海底的水下传感器网络,以及漫游的水下机器人;他们主要研究了短程水声通信、介质访问控制(medium access control,MAC)协议、时间同步的问题,通过测量节点间信号的传播时间,采用到达时间(time of arrival,TOA)方法估计节点间距离从而实现定位。由于TOA方法要求节点间(收、发端)时间同步,他们设计了新的时间同步协议TSHL(time synchronization for high latency)[22],用来处理时间传播误差。

图5 设想的水下无线传感器网络拓扑结构[21]
文献[23]提出一种利用升降(Dive’N’Rise,DNR)信标定位的方法,DNR浮标能够上浮到水面和下潜至一定深度。文献[23]作了两个假设:节点间时间同步,DNR信标和传感器节点装有压力传感器。当DNR信标浮到水面时,能够获取GPS坐标信息,下潜时向传感器节点广播。传感器节点同时监听多个DNR信标的广播信息,通过TOA方法测量距离,从而估计自身的位置。评估了洋流影响下DNR定位系统的性能,并作了假设性探索。
文献[24]提出了一种基于可拆卸式升降收发器(detachable elevator transceivers, DET)的分层定位方案,系统有浮标、DET、锚节点和普通节点组成,DET连接在浮标上,可升降播发自己的位置,该定位方案继承了DNR定位方案的优点,节点定位成功率较高。
4.3.2 定位算法优化研究
文献[25]将欧几里德估计法从二维扩展到三维,提出将递归位置估计与三维欧几里德距离估计方法融合起来的分布式定位算法,能够在大型三维水下传感器网络中,以较小的定位误差和低通信消耗得到较大的覆盖范围。
文献[26]认为传感器节点的自定位和时间同步问题仍然是水下传感器网络极大的挑战,提出一种同时实现节点间时间同步和定位的多点定位算法。通过原子多点定位和递归多点定位,提出了一种自定位和时间同步的简单且有效的方式,并在递归多点定位方法中成功控制了误差传播。在30 km×20 km深6 km的目标区域进行仿真实验,在三维空间里较理想地均匀布设了900个传感器节点,每个节点基本处于蜂窝区的质心,并用定位流程完成时间来评估整个网络的性能。仿真结果表明,节点定位成功率较高接近100%。
文献[27]提出了一种基于无线传感器网络的水下定位系统,该系统使用大量的装有水听器和GPS的标准站,采用声功率水平测距,即由发送和接收的电压差来计算距离,研究了新的定位原理,并从理论上分析可用性,以及新方法在水中噪音和声反射的性能。该方法是接收信号强度指示(received signal strength indication,RSSI)的水声测距应用,定位精度一般。
文献[28]提出了基于TOA测距的水声定位方案(underwater positioning scheme,UPS),并通过仿真实验验证算法。他们通过研究发现:时延和多路径信道可以由改进的超宽带S-V模型化。文献[28]认为文献[25]提出的将欧几里德法扩展到三维水下传感器网络以及文献[29]提出的水下机器人自定位协议,恶化了水下传感器网络带宽窄的问题,降低了网络的吞吐量。
文献[30]提出一种适用于大型水下传感器网络分层定位的方法,并分为两部分,锚节点定位和普通节点定位。在普通节点定位中,采用了分布式距离相关算法,新颖地整合了三维欧几里德距离估计方法和递归位置估计方法。仿真结果表明,该方案以较小的定位误差取得了较大的覆盖范围。
文献[31]在定位成功率、通信消耗、准确度、能源消耗和延迟方面,对三维水下移动传感器网络的三种分布式定位算法作了比较,升降定位(dive and rise localization,DNRL[23]),代理定位(proxy localization,PL),大型传感器网络定位(large-scale localization,LSL[25])。通过仿真实验发现,DNRL和LSL有超过90%的节点实现高精度定位,且DNRL有较低的通信消耗和能源消耗,PL的定位成功率和精确度较低,但定位速度快,而LSL的通信消耗和能源消耗要远远高于前两者。除此之外,LSL的性能严重受平均节点度的影响。
由于文献[32]研究了水下传感器网络关键协议,并从物理层、数据链路层、网络层、传输层和应用层等方面对目前国内外已有的协议进行详细综述,因此,本文不再叙述水下传感器网络协议的发展现状。
5 结束语
水下无线传感器网络定位技术仍然面临许多挑战,声信号在海水中的传播速度很不稳定,容易受温度、盐度、压力、海流等海洋环境要素的影响而变化,造成时延抖动。除此之外,传感器节点的能源供应,水声信道的数据传输率低、通信消耗高、低带宽、高误码率等问题。在后续研究工作中,应致力于水下传感器网络拓扑结构优化、水声通信协议、路由计算、节点间同步及误差补偿等问题研究,以及协调各方面的最优化定位算法和定位系统性能评估。
本文针对目前浮标网络定位技术的不足,简单介绍了水下无线传感器网络技术,从网络拓扑结构方面对水下无线传感器网络定位技术进行分类,介绍了系统原理,并从网络拓扑结构和定位算法优化方面叙述了发展现状,为后续研究提供了参考。
[1] 吕超,王硕,谭民.水下移动无线传感器网络研究综述[J].控制与决策,2009,24(6):801-807.
[2] 孙桂芝.水声通信网络路由协议研究[D].哈尔滨:哈尔滨工业大学,2006.
[3] 任丰原,黄海宁,林闯.无线传感器网络[J].软件学报,2003(14):1282-1288.
[4] CUI Jun-hong,KONG Jie-jun,GERLA M,et al.The Challenges of Building Mobile Underwater Wireless Networks for Aquatic Applications[J].IEEE Network,2006,20(3):12-18.
[5] 张瑜,孟庆海.提高水下GPS定位精度方法研究[J].海洋工程,2009,27(2):106-109.
[6] 王泽民,罗建国,陈琴仙,等.水下高精度立体定位导航系统[J].声学与电子工程,2005(2):1-3.
[7] 李启虎.水声学研究进展[J].声学学报,2001,26(4):295-301.
[8] 王大成,郭丽华,丁士圻.高精度水下定位的一种实现方案[J].海洋技术,2004,23(9):34-38.
[9] 李小民,李建增,宋军,等.水下GPS应用方法研究[J].测控技术,2004,23(6):57-59.
[10] 李睿.水下GPS定位技术研究[D].西安:西安电子科技大学,2008:33-37.
[11] THOMAS H G.New Advanced Underwater Navigation Techniques Based on Surface Relay Buoys[C]//Proceedings of Oceans Engineering for Today’s Technology and Tomorrow’s Preservation(IEEE OCEANS’94).Brest:[s.n.],1994:III/395-III/402.
[12] 蔡艳辉,杨新红.差分GPS水下定位系统的解析法分析[J].大地测量与地球动力学,2008,28(6):101-106.
[13] 863计划水下GPS高精度定位系统课题组.我国首套水下GPS高精度定位导航系统简介[J].中国水利,2004(2):52-53.
[14] 江南,黄建国,李姗.长基线水下目标定位新技术研究[J].仪器仪表学报,2004,25(4):77-80.
[15] 王权,程鹏飞,章传银,等.差分GPS水下立体定位系统[J].测绘科学,2006,31(5):18-20.
[16] 蔡艳辉,章传银,王泽民,等.差分GPS水下立体定位系统浮标姿态的测量[J].测绘科学,2005,30(3):49-50.
[17] BECHAZ C,THOMAS H.GIB System:The Underwater GPS Solution[C]//Proceedings of 5th Europe Conference on Underwater Acoustics(ECUA).Lyon:[s.n.],2000:56-58.
[18] 刘明臣,杨长青,孟桥.水下通信网的MAC层协议及TDCDMA技术的Opnet仿真[J].无线通信技术,2004,23(4):119-220.
[19] SOZER E M,STOJANOVIC M,PROAKIS J G.Underwater Acoustic Networks[J].IEEE Journal of Oceanic Engineering,2000,25(1):72-83.
[20] AKYILDIZ I F,POMPILI D,MELODIA T.Underwater Acoustic Sensor Networks:Research Challenges [J].Ad hoc networks,2005,3(3):257-279.
[21] HEIDEMANN J,YE Wei,WILLS J,et al.Research Challenges and Applications for Underwater Sensor Networking[C]//Proceedings of Wireless Communications and Networking Conference(WCNC2006).Las Vegas:IEEE,2006:I/228-I/235.
[22] SYED A A,HEIDEMANN J S.Time Synchronization for High Latency Acoustic Networks [EB/OL].[2013-11-20].http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.61.7729&rep=rep1&type=pdf.
[23] EROL M,VIEIRA L F M,GERLA M.Localization with Dive’N’Rise (DNR) Beacons for Underwater Acoustic Sensor Networks[C]//Proceedings of the Second Workshop on Underwater Networks.New York:[s.n.],2007:97-100.
[24] CHEN Kai,ZHOU Yi,HE Jian-hua.A Localization Scheme for Underwater Wireless Sensor Networks [J].International Journal of Advanced Science and Technology,2009(4):9-15.
[25] ZHOU Zhong,CUI Jun-hong,ZHOU Sheng-li.Localization for Large-scale Underwater Sensor Networks[EB/OL].[2013-11-20].http://www.engr.uconn.edu/~jcui/UWSN_papers/UbiNet-TR06-04_localization.pdf.
[26] TIAN Chen,LIU Wen-yu,JIN Jiang,et al.Localization and Synchronization for 3D Underwater Acoustic Sensor Networks[C]//Proceedings of 4th International Conference on Ubiquitous Intelligence and Computing.Hong Kong:[s.n.],2007:622-631.
[27] FU Bin,ZHANG Fei-fei,ITO M,et al.Development of a New Underwater Positioning System Based on Sensor Network [J].Artificial Life and Robotics,2008,13(1):45-49.
[28] CHENG Xiu-zhen,SHU Hai-ning,LIANG Qi-lian,et al.Silent Positioning in Underwater Acoustic Sensor Networks[J].IEEE Transactions on Vehicular Technology,2008,57(3):1756-1766.
[29] ZHANG Yue-cheng,CHENG Liang.A Distributed Protocol for Multi-hop Underwater Robot Positioning[C]//Proceedings of IEEE International Conference on Robotics and Biomimetics(ROBIO 2004).Shenyang,China:[s.n.],2004:480-484.
[30] ZHOU Zhong,CUI Jun-hong,ZHOU Sheng-li.Efficient Localization for Large-scale Underwater Sensor Networks [J].Ad Hoc Networks,2010,8(3):267-279.
[31] EROL-KANTARCI M,OKTUG S,VIEIRA L,et al.Performance Evaluation of Distributed Localization Techniques for Mobile Underwater Acoustic Sensor Networks[J].Ad Hoc Networks,2011,9(1):61-72.
[32] 郭忠文,罗汉江,洪锋,等.水下无线传感器网络的研究进展[J].计算机研究与发展,2010,47(3):377-389.
猜你喜欢
中学生数理化·七年级数学人教版(2022年6期)2022-06-05
垂钓(2022年3期)2022-05-14
垂钓(2022年1期)2022-02-09
舰船电子工程(2021年5期)2021-06-04
无线互联科技(2021年4期)2021-04-21
导航定位与授时(2020年5期)2020-09-23
铁道通信信号(2020年9期)2020-02-06
中国外汇(2019年20期)2019-11-25
垂钓(2019年2期)2019-09-10
小猕猴智力画刊(2019年3期)2019-04-19