采用无线信号测距加权的室内协同定位
2014-01-16 06:27JamesPINCHINChrisHILLTerryMOORE
导航定位学报 2014年2期
荆 昊,James PINCHIN,Chris HILL,Terry MOORE
(英国诺丁汉大学 地理空间研究所,诺丁汉NG7 2TU)
1 引言
近年来,随着全球卫星导航定位系统(global navigation satellite system,GNSS)不断普及,面对军用和民用的基于位置服务(location based services,LBS)也越来越广泛。然而大部分LBS用户的日常活动其实集中在室内或市区环境中,这些区域由于卫星信号被遮挡以及多路径效应严重,无法通过传统的基于卫星的导航定位方法进行精确定位[1-2],定位误差甚至可高达200 m[3]。这样的定位精度,无论是针对普通的社交网络用户、商业应用,或急救、消防人员,都无法满足用户需求。
针对无法获取有效卫星信号的室内环境,目前最常见的定位方法有两种,即基于无线网络信号(WiFi,蓝牙,超宽带无线信号等)的定位和基于低端惯性导航(inertial navigation system,INS)的定位[4-6]。基于INS的导航定位不需任何辅助基础设施,可以提供室内室外无缝定位,但是INS(尤其低端INS)的陀螺航向漂移量非常大,数秒内可造成上百米的位置误差[4-5]。实际应用中必须加入适当改正量才能提供正确定位方案。无线信号多存在于室内环境中,因此是较好弥补室内GNSS定位不足的方法。然而传统无线信号极其不稳定,信号波动大,容易受到周围环境变化的干扰,定位时会产生较大的误差[6-8]。超宽带无线信号(ultra-wideband,UWB)将信号分布于1.25 GHz的带宽上,因此传输信号的时间分辨率极高,相比窄频带信号具有稳定、信号穿透性强等性质,基于UWB的定位系统能够提供厘米级精度的定位结果与测距信息[9-12]。然而UWB定位也存在信号捕获问题,依旧会受到多路径效应与非视线传输(non line of sight,NLOS)信号干扰,导致定位与测距精度下降[13]。但只要能够分辨与剔除NLOS造成的干扰可提高定位精度[14-17]。
集成多传感器的协同定位能够改正单传感器信号造成的误差并提高定位系统稳定性,由此提供可靠的室内外无缝导航定位[13,18]。部分学者提出多用户共享信息、多传感器改正信息等协同定位方法来提高复杂环境中的定位精度[19-21]。然而这些系统在一定程度上仍然需要GNSS提供定位改正信息。
本文提出的基于多用户多传感器的室内协同定位方法集成了多用户的测距信号以及周边可接收的WiFi信号、楼层室内地图与从低端INS传感器获取的航向推算(dead reckoning,DR)信息。获取的信息采用粒子滤波(particle filtering,PF)集成来改正、更新用户导航定位结果。
本文首先讨论实验获取的UWB信号测距结果,提出基于UWB测距提高系统稳定性的方法;其次应用基于高斯过程回归(Gaussian process regression,GPR)机器学习的快速生成WiFi信号强度数据库方法,并提出基于PF集成DR、WiFi、室内地图与测距信息的室内协同定位算法;最后,将室内采集的数据通过算法集成得到定位结果并进行算法结果分析。
2 UWB无线信号测距
在复杂环境的定位应用中,获取到的无线信号分为LOS和NLOS两种。当信号发射站(access point,AP)与接收机之间无遮挡物,获取的信号即为LOS信号;需要穿过遮挡物或者从其他物体反射才可达到接收机的信号,均为NLOS信号。接收到的NLOS信号传播时间比无遮挡的LOS信号传播时间长,并且一般来说信号强度减弱,信号更不稳定,造成定位精度下降。因此能够识别出获取的NLOS信号,并剔除它们对定位的影响变得非常重要。文献[22]提出基于机器学习方向对信号分类识别出NLOS信号。通过无线信号获取的测距信息可表达为
(1)
式中,d是用户间真实距离,bi为NLOS造成的误差,与遇到的遮挡物材质、厚度、总体传播路径距离以及整体网络稳定性有密切关系,ei为正态分布的系统误差。
为了验证UWB测距信号的实际效果,作者在诺丁汉大学地理空间信息大楼中进行了三组UWB测距实验。一个完整的UWB网络需要至少4个基站(base unit,BU)才能提供移动设备(mobile unit,MU)的3维坐标,BU应当放置在所需提供定位的区域的周边,尽量分散于不同高度并包围目标区域,同时使BU与MU之间尽量保持通视。实验楼体设计及使用材质较新,室内结构如图1所示,沿着楼道两旁的小房间为普通办公室,下方两个大房间分别为会议室和教室,中间的大房间为仪器设备室,里面使用金属架放置全站仪、GNSS等仪器设备,上方的大房间是仪器室兼车库,里面放置三脚架等设备,并存放实验车辆,由此可见楼中有大量金属遮挡物。圆圈中的五星处设为区域坐标系的零点,直线为行走路径。

图1 实验区域室内地图
该实验通过不同网络设置来比较系统处理NLOS信号的稳定性及测距精度。第一组实验仅使用一个移动的BU和一个移动MU获取测距数据(只有BU能提供设备间信号同步并与MU传输数据,因此必须使用至少1个BU),即不完整网络的测距;第二组实验将BU放置并固定在已知点,2个MU之间进行测距,即建立简单的无法提供坐标定位的网络;第三组实验建立完整的网络,MU可获取坐标定位结果,同时记录测距结果。实验中各BU架设位置与移动用户位置均由徕卡全自动全站仪测量,已知点精度达2 mm,移动用户跟踪精度为10 cm(主要误差来源于移动过程中UWB设备移动而非全站仪测量误差)。
2.1 非网络中用户测距
2.1.1 实验组1
该组实验中,用户1(R1)携带BU,用户2(R2)携带MU并接入电脑记录数据。实验中R1沿楼道走动,R2的路径与R1平行在仪器设备室中走动,因此大部分时间有墙体遮挡,仅在最后R2走出设备室进入楼道时与R1处于通视状态。作为用户位置——时间参考,图2(a)给出两用户的南北向坐标,由于所选择的行走路径(见图1(a)),所以东西向坐标基本始终保持不变。
2.1.2 实验组2
该组实验中,两用户行走路径方向与实验组1相同,只对R2路径稍作延长,由此加入了人体和墙体同时遮挡的情况,图2(b)给出两用户位置——时间参考。该实验将BU固定在设备室内,R1、R2同时携带MU。
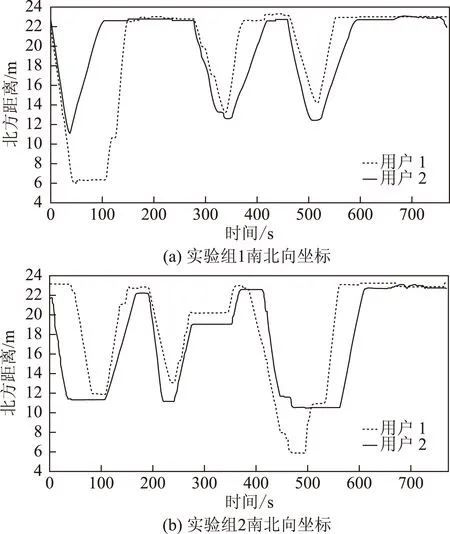
图2 实验组南北向坐标
测距结果见表1及表2。
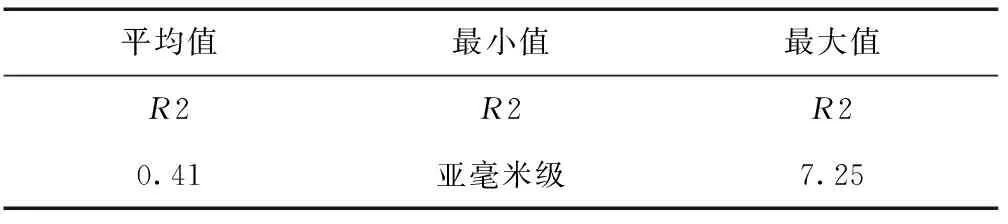
表1 实验组1测距误差/m

表2 实验组2测距误差/m
图3及图4为两组实验测距结果示意图,实线表示全站仪跟踪测量的两用户间距离,点状线表示UWB测距结果,虚线表示测距误差。由结果可见,在遮挡情况下,测距结果比实际距离稍长。两个设备在有严重遮挡时,会导致不能同步,设备间的测距结果相差较大。其中身体遮挡对测距影响较大,误差增加幅度大。而只要两用户能够保持网络传输同步,进入通视区域后,测距精度能够快速提高达到厘米级精度。用户保持网络同步时,两用户的测距信息相差很小,可视为相同。实验组1中85%的测距误差在1 m以内。实验组2中71%的数据测距误差在1 m以内,比第一组实验略有下降。

图3 实验组1测距误差

图4 实验组2测距误差

图5 实验组2(R1-R2)测距结果差
2.2 基于网络的移动用户测距
最后一组实验建立了完整的UWB定位系统,其中6个BU分布于实验区域周边(图1中三角标出),使信号覆盖面积最大。两个移动用户携带MU分布从环形楼道两个不同位置出发沿楼道行走,该情况下两用户之间大部分时间都有至少一道墙壁遮挡,遮挡最多时的情况有两道墙壁和设备室的所有金属仪器架。图(6)给出用户的东西向坐标与南北向坐标作为位置-时间参考。

图6 实验组3 用户东西向坐标与南北向坐标
该实验的遮挡物较多,即使整个网络设备遍布于整个实验区域,但是MU之间、MU与BU之间信号依旧不稳定,容易造成无法同步获取定位、测距数据。实验中仅从R1获取24.5%有效数据,从R2获取36%有效数据,其中65%的测距误差在1 m以内。可见,在复杂环境中加入过多的基站设备,反而会造成网络的复杂度,降低测距精度。

表3 实验组3测距误差/m
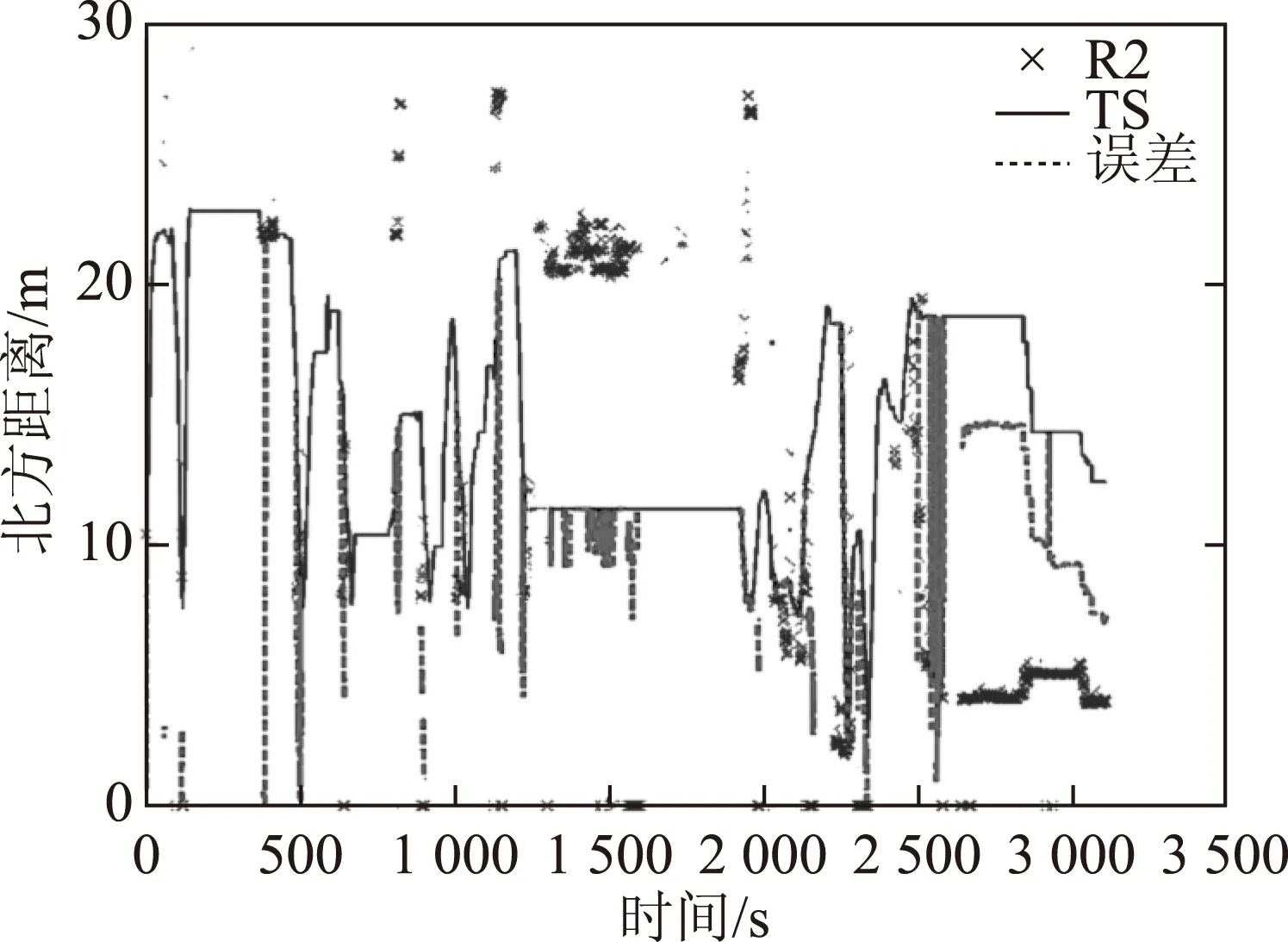
图7 实验组3测距误差
通过上面三组实验可见,在信号稳定情况下UWB能够提供厘米级测距;处于网络中时,即使多个MU~BU之间为NLOS,系统也可能改正NLOS造成的误差。而当环境过于复杂对信号造成较大干扰,如果不需要提供位置坐标,可减小网络的复杂度,并识别出LOS与NLOS信号来权衡测距结果的可靠度。通过在多用户直接加入测距信息,即可约束用户的相对位置关系,由此限定用户可能处于的位置,排除粗差,减小整体误差。
3 WiFi信号强度数据库
3.1 WiFi指纹定位
PRX(d)=Pd0-10nlog10(d)+aWAF+∞
(2)
式中,Pd0为距离发射站某参照距离的RSS(通常为1 m),n为空间信号衰减参数,WAF为墙体衰减参数,a为接收机与AP之间遮挡物的数量,∞为服从正态分布的信号噪声。
根据此模型即可通过获取的RSS反算出信号的传播距离。然而在实际应用中,由于环境变化影响和硬件自身性能导致n值经常发生变化,∞误差范围较大,造成RSS变化大,无法通过实际测得的RSS获取精度的距离。WiFi RSS定位方法是采用基于指纹特征识别(finger printing,FP)的方法来获取位置。FP方法一般为两步,第一步为用户采集先验信息,在所需定位的环境中选择若干采样位置,然后测量并存储每个AP在各个采样位置的位置坐标、信号MAC地址以及RSS等相关信息,存储为指纹数据库;第二部即为用户定位,用户在环境中任意位置获取即时RSS信息并与指纹数据库作比较,可采用信息最接近的指纹位置或者多个指纹位置的加权平均为当前定位位置。
该方法的精度与数据库信息量以及更新效率有密切关系,数据库的采样点越多、数据库即时更新的效率越高,定位结果也就越精确,而耗时也越长,导致基于WiFi的定位准备时间过长,信息存储量大,不便于实时定位以及数据库及时更新。
3.2 基于高斯过程回归的数据库生成
一般认为WiFi信号强度近似于高斯分布,因此可应用GPR快速生成指纹数据库[24-25]。GPR是一种基于贝叶斯理论和统计学发展的机器学习方法[26],它根据训练数据实现某空间区域内的高斯分布,是任意有限个均具有联合高斯分布的随机变量的集合。设D={(xi,yi)|i=1,2,…,n}为一组从某过程提取出的观测量作为训练数据,过程模型为
yi=f(xi)+ε
(3)

m(x)=E[f(x)]
(4)
k(x,x′)=E[f(x)-m(x))(f(x′)-m(x′))]
(5)
应用GPR的必要前提是在目标空间内向量间具有相关性,即RSS与测量位置和AP之间的距离及遮挡物相关。根据数据相关性,可得到预测均值方程以及协方差方程为
(6)

(7)


(8)
求得最优超参数后,可利用式(7)及式(8)得到测试点x*的预测值及其方程。
文中利用该方法快速生成指纹数据库,用户在楼中仅需用15 min走一圈,将采集到的RSS信息和位置信息作为训练数据,并根据经验值设置信号均值以及方差等参数,利用GPML Matlab工具[27]生成每一个AP在楼层中的RSS数据。此方法生成指纹数据库的效率比传统的数据库采集方法高,并且数据精度满足定位需求。图8为楼中8个AP的指纹图,深色表示信号强度较强的区域,与实际AP所在位置符合。

图8 GPR生成WiFi指纹数据库
4 基于粒子滤波的协同定位算法
在WiFi定位中,即使花大量时间采集指纹数据库,仍不可避免信号不稳定导致的误差,而用户间测距信息可以约束相对定位位置,使用户保持一个正确的相对位置从而剔除其他信息中带来的粗差[28]。
本文利用PF集成DR、地图信息、WiFi数据以及用户测距等信息来提供移动用户的导航定位。PF是一种基于蒙特卡洛方法求解贝叶斯概率估计的滤波算法,具有处理非线性非高斯系统等问题的优势,并且容易集成多种不同来源数据[29-30]。PF的状态方程可通过离散时间随机模型描述
xk=fk(xk-1,vk-1)
(9)
式中,xk为某时刻k的状态向量,fk为状态向量xk-1和噪声vk-1的函数。PF的目的即由每个时刻获取的观测值向量通过逐次递推估计状态向量xk为
zk=hk(xk,nk)
(10)


(11)
实际上,无法直接获取p(X0:K|Z0:K)。因此采用大量代表某状态的粒子来代表概率密度分布,并通过递推方式逐步改变粒子的权重以及粒子分布求出后验PDF的最优解。随着粒子数的增加,粒子的概率密度可逼近后验概率密度,然而粒子数的增加也会造成计算量增加,算法效率降低。
本文算法中,采用500个粒子来代表用户实时位置信息,这样既可以保证运算效率也能满足精度要求,然后根据获取的定位信息对粒子进行加权,算法步骤如下:
(1)初始化:在初始位置周围生成500个粒子;

(12)
[Et-1,Nt-1]为上一时刻的位置坐标,[Et,Nt]为该时刻的位置坐标;
(3) 更新与加权:粒子运行过程中,如果某粒子穿越墙体到达另一房间,权值赋为0;同时根据WiFi RSS信息搜索数据库中相似RSS指纹并提取相应位置,利用用户间测距对指纹位置进行约束,将与距离不符的位置剔除,利用剩余指纹位置作为可能位置,根据粒子与这些位置的距离远近进行加权,距离越近的权值越高;

图9 多用户测距约束示意图
(4)重采样与归一化:如果有效粒子数(权值不为0的数量)少于整体的50%,根据剩余粒子进行重采样,重新生成500个粒子;将粒子权值归一化,然后根据粒子的加权平均计算用户此时的位置;
(5)返回(2)进行下一步预测,或结束。
5 实验验证与结果
5.1 模拟实验设置
基于粒子滤波协同定位算法(collaborative positioning particle filtering,CPF)基于Matlab R2011a平台,在Intel双核3 GHz CPU的计算机上运行。为了权衡算法的精度与运行速度,采用500个粒子数。算法中加载获取的楼层室内图,包括室内房间墙体、出入口位置等信息,文献[31]中给出了PF加载室内地图的详细算法。WiFi的指纹数据库采用3.2方法生成,如图8。
模拟实验选择3条不同路线,如图10所示。实时DR数据的步长与航向根据用户携带的低端INS设备获取,定位采用的WiFi数据根据用户携带笔记本电脑记录在走动过程中获取的信号数据。测距信息根据室内环境中UWB实验获取的数据生成。所有数据均与UTC时间同步。

图10 实验真实路径/m
5.2 模拟实验1
实验中将路径1(T1)与路径2(T2)之间,T1与路径3(T3)之间,T1、T2与T3之间应用CPF进行协同定位。由于测距误差标准差为1 m,因此将粒子相对位置的误差范围设定为1 m,该范围内的权值较高,范围以外的粒子权值较低。CPF算法的定位结果与DR定位结果、WiFi协助DR定位结果作比较。定位误差均方根值(root mean square,RMS)以及误差累积分布函数值(cumulative density function,CDF)分布列于表中。

表4 DR定位误差/m
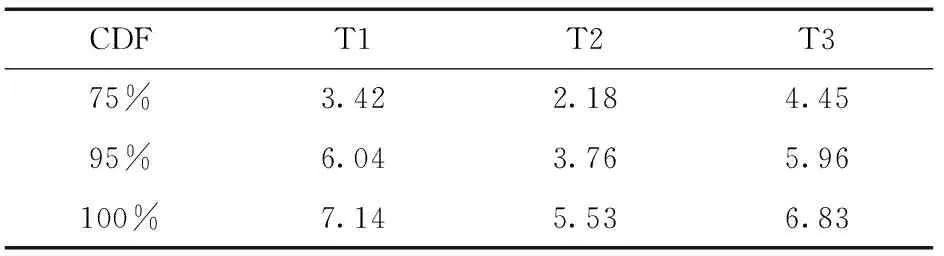
表5 DR/WiFi定位误差/m

表6 两用户(T1、T2)协同定位误差/m
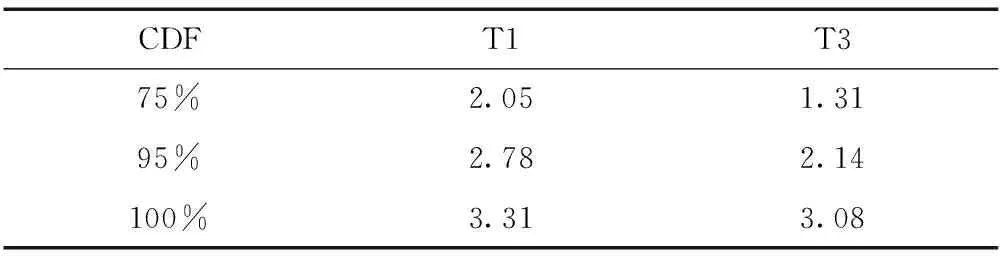
表7 两用户(T1、T3)协同定位误差/m

表8 三用户协同定位误差/m

图11 T1+T2协同定位结果/m

图12 T1+T3协同定位结果/m

图13 T1+T2+T3协同定位结果/m
5.3 模拟实验2
该实验中采用路径与协同组合与实验1相同,但将室内地图约束信息去掉,即允许粒子只要在楼体以内,可穿越墙体在楼中随机移动。
该实验中DR与WiFi协助DR定位失败,即定位结果误差超过10 m,并且过多粒子移动到楼体以外造成算法极不稳定。然而CPF算法能够将定位结果约束在真实位置附近,大幅度减小定位误差。定位误差RMS的CDF分别列于表中。

表9 两用户(T1、T2)协同定位误差(无地图信息)/m
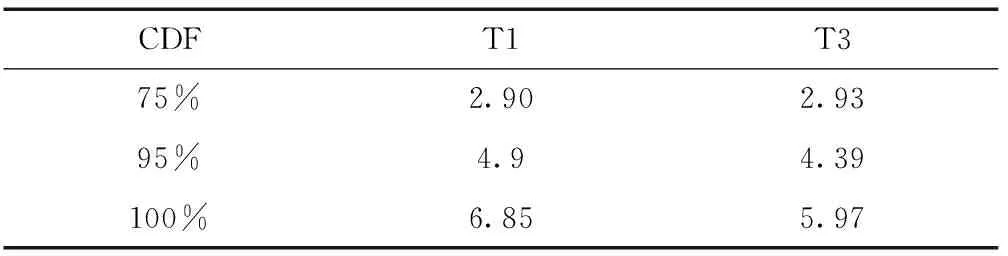
表10 两用户(T1、T2)协同定位误差(无地图信息)/m

表11 三用户协同定位误差(无地图信息)/m
5.4 结果说明
从定位结果可见采用GPR生成的WiFi指纹数据库协助DR定位已对定位结果有所提高。DR结果显示路径T2的定位结果较高,但这主要是由于路径恰好受楼层楼道约束,如果路径或楼层的几何结构发生变化,如T1和T3,定位结果就大幅度下降。
用户之间测距约束能够有效剔除根据指纹数据库反馈的误差较大的位置,其中两用户CPF相对DR/WiFi定位精度提高了40%,三用户CPF定位精度提高50%。在去掉楼层室内地图信息以后,测距约束能够保证算法的稳定性,并且定位精度至少达到有室内地图信息的DR/WiFi定位水平。
后续模拟实验通过改变测距的标准差(达3 m)以及增加用户数量分析CPF定位精度,实验验证表明算法能够处理低精度测距信息,并不会对定位结果造成太大影响,而过多用户不一定使定位精度大幅度提高。
6 结论
本文提出了一种基于PF集成DR与WiFi信息、通过用户间测距对位置加权的协同定位算法。文章提供了室内环境中实验获取的UWB测距结果,由此提出多用户测距约束定位。其次给出了基于GPR快速生成WiFi RSS指纹数据库的方法,减小建立定位所需数据库的工作量。最后基于PF集成以上信息进行多用户多传感器协同定位,通过模拟实验获得定位结果并对算法进行验证。
该CPF算法在没有非常高精度的指纹数据库情况下,仍可提供高精度定位结果,增强定位系统稳定性,减少采集先验数据的工作量;同时利用多用户测距约束剔除了基于WiFi定位时由于信号不稳定造成的粗差,最终提高定位精度,定位结果比DR/WiFi定位结果提高40%,增加为三用户时提高50%。在没有室内地图信息的情况下,仍可提高较稳定的定位结果,精度可达到有地图信息的DR/WiFi定位水平。
实验结果也表现出一些不足与问题。在实验1中,虽然单个粒子不允许穿越墙体,但是算法不考虑历史数据改正,因此当某时刻的粒子群分别在两个不同房间内时,加权平均的位置可能使路径穿过墙体,如果能实时改正这个问题可进一步提高定位精度。
测距实验中可见,即使UWB信号在室内进行定位测距时也经常会出现数据无法同步,NLOS信号造成误差变大的情况。根据获取的数据信息来识别NLOS信息,即误差较大的信号,并排除这些信号对测距约束的影响,也可提高定位精度与稳定性。
该算法提供了在没有WiFi指纹数据库或室内地图等先验信息的情况下开始导航定位然后在定位过程获取室内信息并将其存储用于改正后续定位的可能性。未来工作应考虑提供低精度数据的检测并排除这些信息对定位干扰。
[1] BENFORD S.Future Location-based Experiences[EB/OL].(2005-01-24)[2013-12-26].http://www.jisc.ac.uk/uploaded_documents/jisctsw_05_01.pdf.
[2] GU Yan-ying,LO A,NIEMEGEERS I.A Survey of Indoor Positioning Systems for Wireless Personal Networks[J].IEEE Communications Surveys and Tutorials,2009,11(1):13-32.
[3] ZANDBERGEN P A.Accuracy of iPhone Locations:A Comparison of Assisted GPS,WiFi and Cellular Positioning[J].Transactions In GIS,2009,13(s1):5-25.
[4] HIDE C.Integration of GPS and Low Cost INS Measurements[D].Nottingham,UK:University of Nottingham,2003.
[5] ABDULRAHIM K,HIDE C,MOORE T,et al,Aiding Low Cost Inertial Navigation with Building Heading for Pedestrian Navigation[J].Journal of Navigation,2011,64(2):219-233.
[6] CHEN Yong-guang,KOBAYASHI H.Signal Strength Based Indoor Geolocation[EB/OL].[2013-12-26].http://hisashikobayashi.com/papers/Wireless%20Geolocation%20Algorithms%20and%20Analysis/Signal%20Strength%20Based%20Indoor%20Geolocation.pdf.
[7] KAEMARUNGSI K,KRISHNAMURTHY P.Analysis of WLAN’s Received Signal Strength Indication for Indoor Location Fingerprinting[J].Pervasive and Mobile Computing,2012,8(2):292-316.
[8] NARZULLAEV A,PARK W,HOYOUL J.Accurate Signal Strength Prediction Based Positioning for Indoor WLAN Systems[C]//Proceedings of Position,Location and Navigation Symposium(2008 IEEE/ION ),CA:IEEE,2008:685-688.
[9] CHOLIZ J,HERNANDEZ-SOLANA A,VALDOVINOS A.Evaluation of Algorithms for UWB Indoor Tracking[C]//Proceedings of 8th Workshop on Positioning Navigation and Communication8th Workshop On Positioning Navigation and Communication(WPNC).Dresden:[s.n.],2011:143- 148.
[10] HARMER D.Ultra Wideband (UWB) Indoor Positioning[EB/OL].[2013-12-26].http://esamultimedia.esa.int/docs/NavigationProjects/UWB_tech_Proj_Overview.pdf.
[11] DARDARI D,CONTI A,FERNER U,et al.Ranging with Ultrawide Bandwidth Signals in Multipath Environments[EB/OL].[2013-12-26].http://wgroup.lids.mit.edu/publications/moewin/UWB%20Ranging-PIEEE-02-09.pdf.
[12] DE ANGELIS A,DWIVEDI S,HANDEL P,et al.Ranging Results Using a UWB Platform in an Indoor Environment[C]//Proceeding of 2013 International Conference on Localization and GNSS (ICL-GNSS).Turin:[s.n.],2013:1-5.
[13] SHEN Yuan,WYMEERSCH H,WIN M Z.Fundamental Limits of Wideband Localization—Part II:Cooperative Networks[J].IEEE Transactions on Information Theory.2010,56(10):4981-5000.
[14] MARANO S,GIFFORD W M,WYMEERSCH H,et al.NLOS Identification and Mitigation for Localization Based on UWB Experimental Data[J].IEEE Journal on Selected Areas in Communications,2010,28(7):1026-1035.
[15] OPPERMANN I,HMLINEN M,IINATTI J.UWB:Theory and Applications[M].Chichester:John Wiley & Sons Ltd,2005.
[16] SCHROEDER J,GALLER S,KYAMAKYA K,et al.NLOS Detection Algorithms for Ultra-wideband Localization[C]//Proceedings of 4th Workshop on Positioning,Navigation and Communication(WPNC '07).Hannover:[s.n.],2007:159-166.
[17] YAN Jun-lin ,TIBERIUS C C,BELLUSCI G,et al.Non-Line-of-Sight Identification for Indoor Positioning Using Ultra-wideBand Radio Signals[J].Navigation.2013,60(2):97-111.
[18] WYMEERSCH H,LIEN J,WIN M Z.Cooperative Localization in Wireless Networks[EB/OL].[2013-12-26].http://wgroup.lids.mit.edu/publications/moewin/Cooperative-Localization-PIEEE-02-09.pdf.
[19] CHAN Li-wei,CHIANG Ji-rung,CHEN Yi-chao,et al.Collaborative Localization:Enhancing WiFi-Based Position Estimation with Neighborhood Links in Clusters[EB/OL].[2013-12-26].http://liweichan.com/paper/pervasive06-collaboration-chan.pdf.
[20] ZHANG Bao-li,YU Feng-qi,ZHANG Zu-sheng.Collaborative Localization Algorithm for Wireless Sensor Networks using Mobile Anchors[C]//Proceedings of 2nd Asia-Pacific Conference on Computational Intelligence and Industrial Applications(PACIIA 2009).Wuhan:[s.n.],2009:309-312.
[21] KEALY A,ALAM N,TOTH C,et al.Collaborative Navigation with Ground Vehicles and Personal Navigators[C]//Proceedings of 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN).Sydney:[s.n.],2012:1-8.
[22] GUVENCÇI,CHONG C C,WATANABE F,et al.NLOS Identification and Weighted Least-squares Localization for UWB Systems Using Multipath Channel Statistics[J].EURASIP Journal on Advances in Signal Processing,2008(271984):1-14.
[23] MOLISCH A F.Wireless Communications[M].Chichester:John Wiley & Sons,2010.
[24] FERRIS B,HHNEL D,FOX D.Gaussian Processes for Signal Strength-based Location Estimation[EB/OL].[2013-12-26].http://www.roboticsproceedings.org/rss02/p39.pdf.
[25] FARAGHER R M,SARNO C,NEWMAN M.Opportunistic Radio SLAM for Indoor Navigation Using Smartphone Sensors[EB/OL].[2013-12-26].http://resilientpnt.org/wp-content/uploads/Indoor-Nav-Opportunistic-Smartphone-Sensors.pdf..
[26] RASMUSSEN C E,WILLIAMS C K I.Gaussian Processes for Machine Learning[M].Cambridge:The MIT Press,2006.
[27] ANON.Documentation for GPML Matlab Code version 3.4[EB/OL].(2013-11-11)[2013-12-20].http://www.gaussianprocess.org/gpml/code/matlab/doc/.
[28] JING Hao,HIDE C,HILL C,et al.Particle Filtering in Collaborative Indoor Positioning[C]//Proceedings of 2013 China Satellite Navigation Conference (CSNC).Heidelberg:Springer-Verlag Berlin Heidelberg ,2013:633-649.
[29] RISTIC B,ARULAMPALM S,GORDON N J.Beyond the Kalman filter:Particle Filters for Tracking Applications[M].Norwood:Artech House Publishers,2004.
[30] ARULAMPALAM M S,MASKELL S,GORDON N,et al.A Tutorial On Particle Filters for Online Nonlinear/Non-Gaussian Bayesian Tracking[J].IEEE Transactions on Signal Processing,2002,50(2):174-188.
[31] PINCHIN J,HIDE C,MOORE T.A Particle Filter Approach to Indoor Navigation Using a Foot Mounted Inertial Navigation System and Heuristic Heading Information[C]//Proceedings of 2012 International Conference on Indoor Positioning and Indoor Navigation(IPIN).Myrtle Beach:[s.n.],2012:1-10.
猜你喜欢
导航定位学报(2022年4期)2022-08-15
昆明医科大学学报(2022年1期)2022-02-28
小哥白尼(趣味科学)(2021年11期)2021-02-28
小天使·一年级语数英综合(2020年10期)2020-12-16
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
科学(2020年3期)2020-01-06
电子制作(2017年7期)2017-06-05
儿童时代·快乐苗苗(2016年2期)2016-10-22
飞碟探索(2015年8期)2015-10-15