基于雷达探测的沿海边防可视化管控应用技术研究
2014-01-01 03:18赵勇,吴刚
现代雷达 2014年12期
赵 勇,吴 刚
(1.公安部边防管理局, 北京100062; 2.南京电子技术研究所,南京210039)
0 引言
边境安全是国家防务的一个重要组成部分,是维护国家安全和领土完整的第一道防线。边境安全系统集监视和指挥控制于一体,通过障碍设施和传感器的配置集成,实施穿越阻滞,提供边境监视、威胁早期预警、探测跟踪、目标识别、事件分类、入侵阻截和威胁响应的整体解决方案。
沿海边防可视化管控系统为边境安全服务,通过将原单一的雷达探测手段与其他各类传感器信息的有效接入、深度融合,构建多种类、多数量复合型传感器感知系统,对通过敏感重要沿海边防辖区、重要出入通道的船只进行监视、识别和辨认,按威胁度进行分级、分类,实时预警、报警,为边境海防业务工作提供可视、可控、智能的全面感知和监控预警支持。
1 沿海可视化智能管控系统
沿海可视化智能管控系统由部署在前端的监测点传感子系统、情报处理子系统和部署在指挥中心的智能管控软件子系统组成。
传感子系统包括雷达探测设备、智能化光红外热像仪、可见光摄像机、AIS、GPS和北斗卫星导航终端等传感器设备。
情报处理子系统通过接入监测点已配置的各类传感器,全天候不间断对所辖海域的目标进行监控,提供系统海面目标信息,及时发现海面异常目标信息。智能管控软件子系统实现雷达情报收集、分发,多传感器(雷达、光电、AIS、GPS)的情报融合;实现业务统计分析;完成对各类传感器的指挥控制和协同探测;同时提供基于GIS海图态势显示的良好工作界面[1]。
系统组成示意如图1所示。
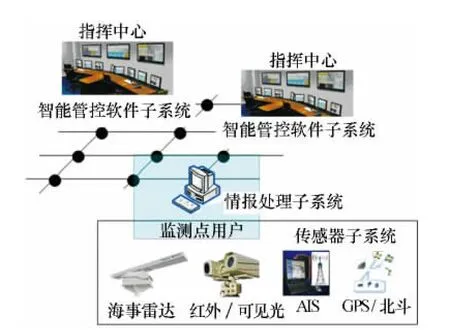
图1 系统组成示意
1.1 主要任务
沿海可视化智能管控系统的主要任务包括:
1)海情监控
通过有效协同雷达、光学成像设备信息,探测监控管辖海域的舰艇、船只目标活动情况,提供用户基于海图平台上的海情态势信息。
2)协同探测
雷达探测网络与红外、可见光探测设备协同工作,集成AIS/GPS/北斗信息应用,形成综合态势,实现对目标的连续稳定跟踪和对目标属性的多重验证识别。
3)观察取证
针对监控区域内发生的各类事件和执法行为实施视频、数据联动取证,实现图像、光学视频和红外视频的录像取证,并对视频信息进行存储处理。
4)任务管理
实现多层级之间信息互通、接收和处理指控命令。
5)信息共享
将雷达点位信息、视频图像信息及状态信息等逐级上报上级监测中心和通过IP网络实现现场态势的共享能力。
1.2 工作流程
系统实现雷达情报收集、分发,多传感器(雷达、光电、AIS、GPS)的情报融合;实现业务统计分析;完成对各类传感器的指挥控制和协同探测;提供基于海图态势显示的良好工作界面。
其系统工作流程如下:
1)接收雷达目标信息、AIS/GPS/北斗信息,并形成共享海域态势情报。同时,光电传感子系统将获取的图像及视频信息传输给系统的信息处理终端,由终端内的相应软件进行处理、存储与显示。同时,光电传感器的云台接受系统的控制指令,做出对应动作。
2)多传感器情报处理子系统将获取的目标点位信息传输给系统的信息处理终端,由终端内的智能管控软件子系统进行处理、存储与显示。同时,雷达伺服机构云台接受系统的控制指令,做出对应动作。
雷达传感器具有作用距离远和全天候、全天时的特点,对水面舰船目标的探测主要通过雷达来早期发现、跟踪和预警,在光电技术、AIS技术等技术手段的支持下,通过配置智能化光红外热像仪、可见光摄像机对海域目标进行可视化监视、跟踪和识别,提供实时监控图像。尤其采用红外热像仪可以在黑暗和复杂天气条件下,透过尘、雾和烟等障碍影响,对海岸边境目标进行可视化监视、跟踪和识别,可进一步提高发现概率和识别能力[3]。
沿海可视化智能管控系统通过监测点与监控中心的内部网络,实现各个子系统之间以及子系统与外部系统之间的信息互联互通,具体内部信息关系如图2所示。
基于雷达探测的沿海可视化智能管控系统涉及多项重要技术,包括雷达目标信息处理、GIS技术、数据库应用技术和异类传感器数据分析等,其中,异类多传感器信息融合、多传感器指挥协同探测和自动目标识别技术的解决实现尤为重要。

图2 系统信息关系示意
2 异类多传感器信息融合技术
异类多传感器信息融合是指对不同知识源和多个异类传感器所获得的信息进行综合处理,消除异类传感器信息之间存在的冗余和矛盾,利用信息互补,提高系统可靠性和分辨率,扩展空间观测范围,增强数据的可信任度。
在该系统中,主要的目标信息来自雷达探测、AIS获取和红外成像点目标信息生成,数据关联是数据融合中的重点和难点,其中多假设跟踪算法被认为是数据关联的最优方法,采用了基于MHT算法的点迹融合技术实现对目标的数据融合[2]。
其流程图如图3所示。
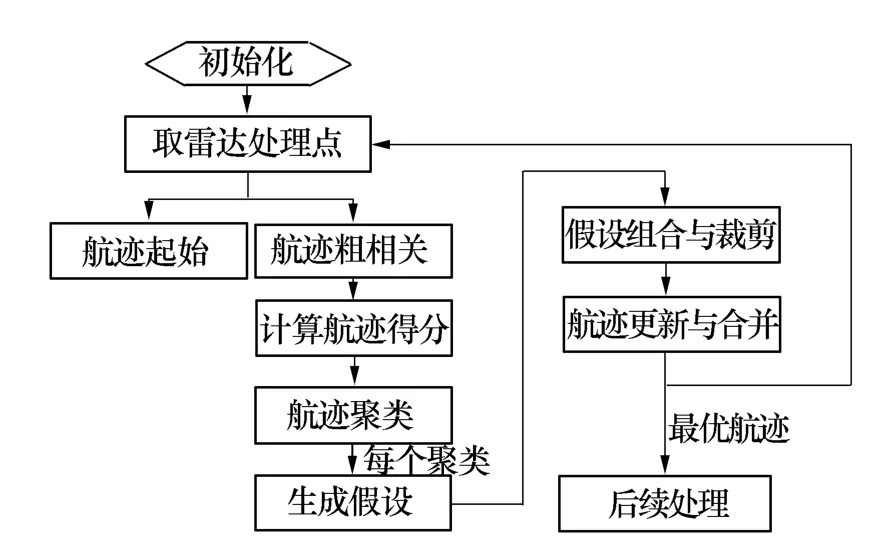
图3 MHT算法实施流程图
基于MHT算法的点迹融合技术说明如下:
1)航迹粗相关通过对某一时刻AIS或红外目标点位信息与雷达采样信息状态误差估计,并与阈值进行比较得到一组或几组判定为可能关联的航迹信息,如下式描述
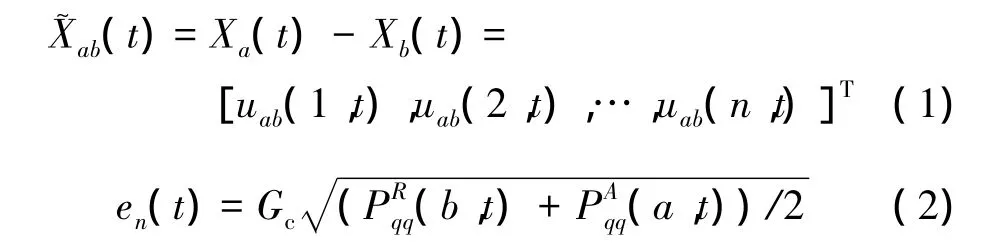
式(1)为误差估算方程,式(2)为阈值方程。Gc在平稳状态下取值为3,运动状态下取值为5,当估算误差满足|uab(1,t)|<e1∩|uab(2,t)|<e2∩…|uab(n,t)|<en时,可以说明两组信息在此时刻是关联的。
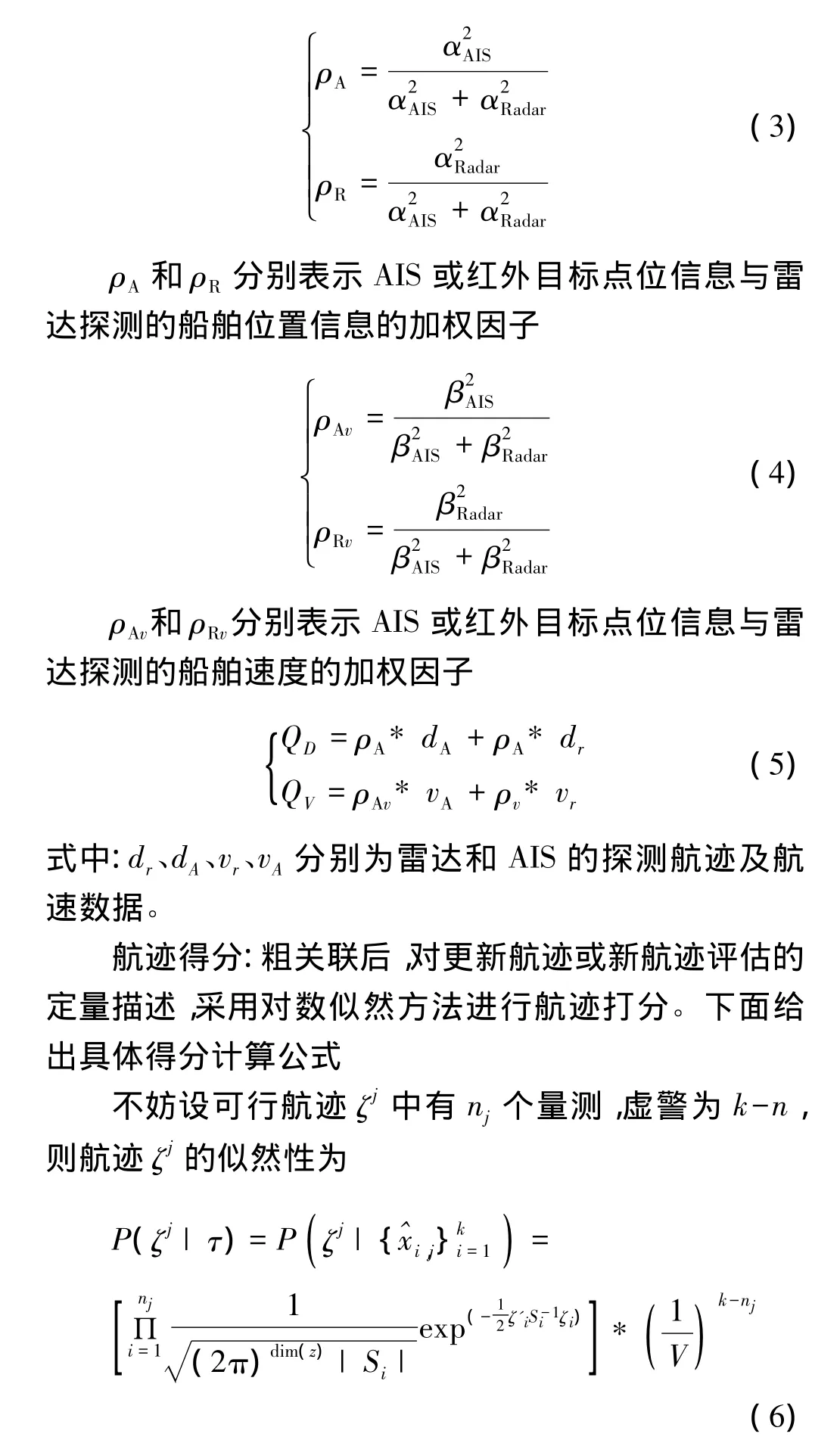
式中:{^xi,j表示有可行航迹 ζj滤波形成的集合;ζj、Si分别表示对应时刻的量测残差(新息)和残差协方差阵。V表示监视区域的体积。
2)航迹聚类。分别将粗关联上的单雷达量测与以前的历史假设(分组)进行互联,形成新的组。如果上轮中出现两个相互独立的组共享了共同量测,则将此两个组合并成一个组,同时作相应组的合并和拆分,以达到各个组之间无共享量测,组内部的系统航迹间必有直接或间接的共享量测关系。对于和其他组都无共享量测的航迹生成新的组。
3)假设生成和裁剪。生成假设是MHT算法的核心,对于每个形成的假设必须满足如下条件:(1)每个量测要么仅包含在一条航迹中要么属于一个虚警;(2)每条航迹要么有且仅有一个新量测,要么没有量测更新。在形成假设的同时完成假设分数的计算,假设分数是组成假设的各航迹的分数总和。

4)航迹更新与合并。对由前期处理得出的系统航迹和单站点、航迹的一对一匹配关系,由航迹优化模块对该系统航迹作平滑优化处理。对那些共享量测与类型状态向量的航迹作合并处理,一旦两条航迹被认为是相似的,则具有更高后验概率的航迹被保留,另一条航迹被删除。
3 多传感器指挥协同探测
系统中同时应用多种雷达传感器、光电传感器、辅助类传感器及多传感器综合探测平台。各种传感器应用气候环境、作用距离、目标识别能力均不同,需要多种传感器协同工作。多传感器协同探测包括不同种类传感器的接力和不同站点同种传感器的探测接力。
通过建立所有监控中心和监控站以及传感器位置信息数据库,根据各类传感器探测距离建立协同接力策略,同时实现传感器自动化管理系统,并借鉴已有自动跟踪技术,经过改良应用在光学传感器上,结合已开发系统对时软件和误差补偿算法,从而实现和完善多传感器指挥协同探测技术能力。
4 自动目标识别技术
通过以雷达为主导的复合监视识别技术研究和红外可见光跟踪和目标识别技术应用实现,应用自动目标识别技术ATR,结合目标本身的姿态变化、缺省、遮挡以及目标所处背景的复杂性,有针对复杂海洋背景和天气状况下的检测、分类和识别目标的能力。
5 结束语
本文针对基于雷达探测的沿海边防可视化管控系统,提供了该类型系统组成、能力、工作流程和相关技术解决方案,特别对基于雷达目标探测手段结合光学技术实现可视化目标管控提供了技术解决思路,对今后在实际应用中如何提高可视化系统效能将提供一定的帮助。
[1] 王 洋,汤 舰.基于多传感器的边境监视系统总体应用技术研究[J].现代雷达,2012,34(增刊):134-137.Wang Yang,Tang Jian.Research of border surveillance system based on wulti-sensor[J].Modern Radar,2012,34(supp):134-137.
[2] 陆耀宾,孙 伟.基于MHT的多传感器数据融合算法[J].中国电子科学研究院学报,2008,3(1):24-29.Lu Yaobin,Sun Wei.A multisensor data fusion algorithm based on MHT[J].Journal of China Academy of Electronics and Information Technology,2008,3(1):24-29.
[3] 李立仁.浅谈海防监控中的雷达与光电互动和透雾功能[J].激光与红外,2006,36(12):1155-1156.Li Liren.Brief descriptions of the function of the interaction between radar and video image and passing through the fog in the system of video monitor and control[J].Laser & Infrared,2006,36(12):1155-1156.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
世界科学技术-中医药现代化(2022年3期)2022-08-22
云南化工(2021年8期)2021-12-21
铁道通信信号(2020年3期)2020-09-21
海洋信息技术与应用(2020年1期)2020-06-11
青年歌声(2019年12期)2019-12-17
传媒评论(2019年4期)2019-07-13
铁道通信信号(2018年8期)2018-11-10
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16