海杂波中的雷达目标检测技术综述
2014-01-01 03:18陈小龙
现代雷达 2014年12期
何 友,黄 勇,关 键,陈小龙
(海军航空工程学院a.信息融合研究所; b.电子信息工程系, 山东烟台264001)
0 引言
随着我海军战略由近海防御向远海防卫转变,以及当前国际安全形势的复杂化,尤其是美国亚太再平衡战略的实施[1],使得我海军面临的海上威胁与挑战日益增多,对我海军的对海雷达探测能力提出了更高的要求。
不同于其他战场环境,海战场的信息环境更加复杂[2]。在一体化联合作战中,海战场信息覆盖全维空间,包括水面、水下、海洋上空、濒海陆地(岛屿)和网络电磁空间,并与外层空间紧密相连。海战场环境中雷达面临的主要威胁目标涵盖多种类型,包括:(1)航母、驱逐舰、导弹快艇等水面目标;(2)潜艇、水下无人作战编队等水下目标;(3)导弹等高速高机动海上目标;(4)作战飞机等空中目标;(5)濒海攻击目标;等等。这些目标都有各自不同的雷达散射特征和运动学特征,同时,又都以复杂的海洋背景作为掩护,从而,不同程度地表现出低可观测特性,增加了雷达探测的难度。因此,充分结合雷达信号资源,深入研究海上目标特性和海洋背景特性,开发能适应复杂海战场环境的实用的雷达目标检测技术对于提升雷达对海探测能力具有重要意义。
1 海杂波中雷达目标检测技术面临的主要难点
海上目标回波处理面临的复杂海洋环境、掠海飞行器机动带来的多普勒扩散、雷达分辨率提高带来的目标能量扩展以及距离走动、隐身目标使得雷达截面积(Radar Cross Section,RCS)下降、慢速目标的稳定跟踪与航向航速快速精确估计、海面目标的分类与识别等都是目前雷达对海上目标探测过程中面临的亟待解决的难点问题,而其中海上目标雷达检测技术面临的难点概括起来主要有如下三点。
难点1:海洋环境复杂,使得海杂波特性认知难度大
海杂波中的雷达目标检测技术研究首先要掌握海杂波特性,主要包括幅度特性、谱特性、非线性特性、时间空间相关特性等方面。但由于受气象、地理等诸多环境因素的影响,海面非线性随机变化,机理非常复杂,并且海杂波还与雷达平台、波段、极化、擦地角、高度、分辨率等参数有关,使得海杂波特性认知极其困难。
1)海洋水文气象物理过程十分复杂[3]
海洋环境受台风等因素影响,海况复杂,气象多变,对电磁波、水声波具有不确定传播及衰减作用。在近海地区,气象状况尤其不定,异常大气效应普遍存在。
2)海洋环境的复杂性使得海面模型是多个参数的非线性函数[4]
海杂波不仅取决于浪高、风速、持续时间、海况、海表面温度、当地气候环境以及海浪相对于雷达波束的方向,而且还取决于雷达自身的参数,诸如波段、脉宽、脉冲重复频率、擦地角、分辨单元大小、极化方式等。
3)海洋环境的复杂性使得海杂波呈现非高斯、非线性和非平稳特性[5-12]
非高斯性主要表现为,在小擦地角条件下,受多径效应、遮挡的影响,高分辨率雷达所面临的海杂波背景严重偏离瑞利模型,幅度分布出现重拖尾现象。非线性特性与海表面的动态模型密切相关,而非平稳性主要由海表面状态的时变特性引起。这些“三非”特性使得传统方法难以对海杂波进行建模与分析。
4)海洋环境的复杂性使得在高海况或低擦地角时,海杂波出现海尖峰[13-15]
海浪随风速的增加而增高,在重力作用下,当海浪失去平衡状态时,出现浪花,从而产生破碎波,而破碎波的雷达反射回波即为海尖峰。此时雷达回波强度会明显增强,类似于目标回波,其幅度概率密度曲线表现出重拖尾现象。实验表明,海尖峰易出现在高分辨、低擦地角、高海况以及HH极化方式下;海尖峰使得海杂波多普勒谱展宽,体现出明显的时变和非平稳特性。
难点2:回波信杂比低以及复杂非均匀背景,使得目标检测难度大
一方面,目标具有低可观测特性,使得回波信杂比低,增大了雷达检测的难度。具有低可观测特性的目标大体可分为如下四类:(1)小尺寸目标,从而使其回波很微弱,例如小木船、潜艇通气管和潜望镜等;(2)隐身目标,RCS小,例如隐身快艇、飞机和巡航导弹等;(3)大目标,但由于雷达分辨低、距离远等因素导致目标单元中信杂比很低,例如超视距雷达观测时的情况;(4)高速或高机动目标,其在观测时间内会出现距离或多普勒走动,导致能量分散。
另一方面,雷达海上目标检测技术在实际应用过程中面临的背景并非三类背景(即,均匀背景、杂波边缘背景和多目标环境)中的任意单一类型,而是由海面、岛屿、陆地、海尖峰、其他目标、强散射点距离旁瓣以及不同海情等形成的、涵盖三类背景类型的复杂非均匀环境,从而使得常规CFAR检测技术面临两难的参数选择问题[16]。
难点3:检测算法适用条件及性能验证评估难度大
首先,需要完备的实测数据和相应的工程化处理手段,然而海面和目标对不同的雷达频率、极化等参数的响应均不一样,很难做出全面的分析与验证;其次,已公开的数据较少,自建实测数据库需要雷达、海面目标、试验场地、采集设备、辅助器材等软硬件建设,以及长期系统的观测与积累,历时可能数十年;最后,工程化处理需要长期系统的规范试验与比对,常受地理位置、试验水平、人员配置、组织协商、经费等因素的制约。
2 海杂波中雷达目标检测技术的分类综述
2.1 从检测机理的角度来分
根据检测机理的不同,可将雷达目标检测器分为能量检测器[17]和特征检测器[18-19]。
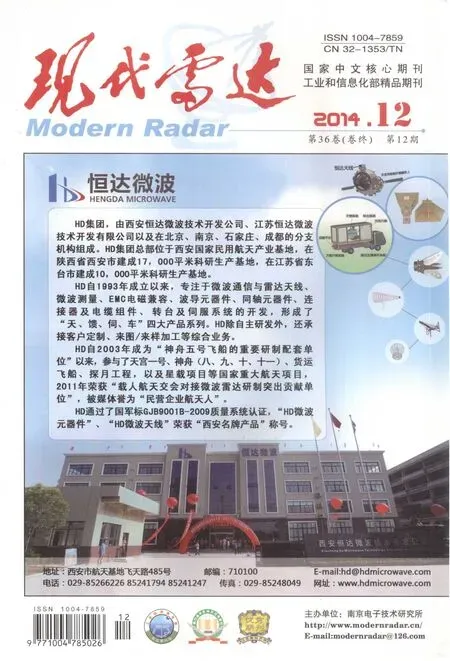
大多数雷达目标检测器利用的是数据的一阶(幅度)或二阶(功率、功率谱)统计特征,被称为能量检测器,该类检测器的主要构造方法是似然比检验。例如,“自适应匹配滤波(Adaptive Matched Filter,AMF)”检测器[20],其原理框图如图1所示,最终与门限进行比较的是经过白化和相参积累处理后的回波功率。
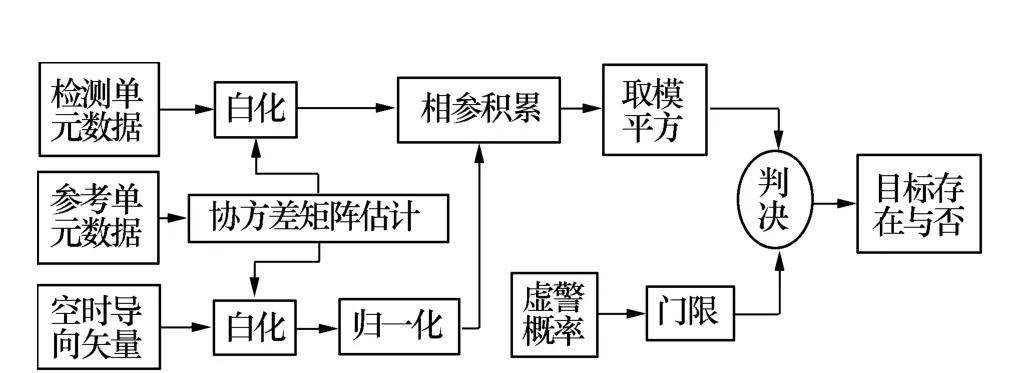
图1 AMF检测器的原理框图
特征检测器则是将目标检测问题转化为分类问题,即,判断回波是否属于背景所在的类。该类检测器的形成关键在于提取稳健的具有可分性的特征空间,并形成判别区域。图2给出了特征检测器的概念框图。

图2 特征检测器的概念框图
图3和图4给出了两种特征检测器的原理框图及处理结果演示图,一种是基于分形特征的检测算法[21]。该算法通过提取分形特征(例如,分形维数、分形谱等)来反映海杂波与目标所具有的不同的自相似特性,从而判断回波是属于“纯海杂波”一类还是属于“海杂波+目标”一类。
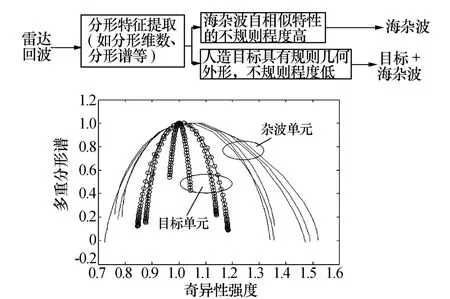
图3 基于分形特征的检测算法的原理框图及处理结果演示图
图4 高分辨海杂波联合特征抑制和漂浮目标检测算法的原理框图及处理结果演示图
另一种是高分辨海杂波联合特征抑制和漂浮目标检测算法[19]。该算法中的三维特征空间是指从高分辨海杂波中提取出来的相对平均幅度(Relative Average Amplitude,RAA)、相对多普勒峰高(Relative Doppler Peak Height,RPH)和幅度谱相对向量熵(Relative Vector-Entropy,RVE)这三个特征形成的特征空间;凸包判决是指采用凸包优化算法计算出“纯海杂波”与“海杂波+目标”两类之间的判别空间;图4中的右两图从左往右表示:随着处理时间的延长(也就是所利用的数据点越多),两类之间的区分度越大,检测效果越好。
2.2 从建模的角度来分
从建模的角度来分,可分为统计学处理方法和非线性处理方法。统计学处理方法将雷达回波建模为随机过程,在此基础上研究海杂波与目标在幅度、谱和相关性等统计属性上的差异,建立相应的模型形成检测统计量。然而,随着研究的深入,尤其是针对海杂波这类复杂背景,统计模型日益复杂,可操作性及物理含义下降。海面起伏是非线性的,非线性处理方法能很好地反映海杂波的非线性物理属性。典型的非线性处理方法是分形处理方法,该类方法具有参数估计简单便捷的特点。不过,该类方法难以形成闭式的检测统计量。将海杂波分形参数估计简单便捷的特点与成熟的统计处理方法相结合,提取能反映海杂波非线性物理属性的特征,形成具有可实现性和实时性的检测统计量,是一个很有意义的发展方向。图5给出了一种统计与非线性相结合的处理方法,基于分形可变步长最小二乘算法的检测方法[22]的原理框图,该方法利用最小二乘拟合技术输出的误差作为检测统计量,而其中估计的参数是Hurst指数(一种分形参数)。
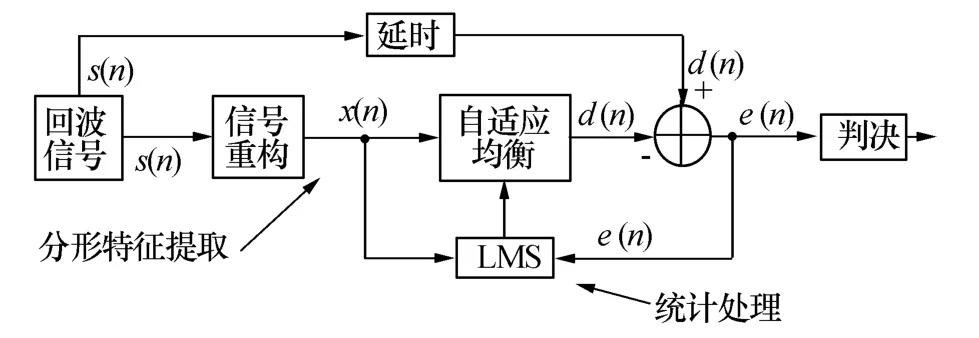
图5 基于分形可变步长最小二乘算法的检测方法的原理框图
2.3 从积累的角度来分
包括相参积累与非相参积累、短时间积累与长时间积累条件下的雷达目标检测技术。目前的研究热点包括:高速高机动目标在跨分辨单元条件下的相参积累检测,低可观测目标的长时间非相参积累检测,等,主要是解决目标运动跨分辨单元条件下目标能量的积累问题。
1)目标跨距离单元走动条件下的基于Radon-傅里叶变换的长时间相参积累检测方法[23]
根据目标运动参数提取距离-慢时间平面中的观测序列,然后,通过离散傅里叶变换对该序列进行积分,实现目标能量的相参积累。通过联合搜索参数空间中的目标参数,解决了距离走动与相位调制的耦合问题。相比于常规动目标检测(Moving Target Detection,MTD)方法,基于Radon-傅里叶变换的长时间相参积累检测方法可将相参积累时间延伸至多个距离单元。
2)目标跨距离单元和多普勒单元走动条件下的基于Radon-分数阶傅里叶变换的长时间相参积累检测方法[24]
该方法融合了Radon-傅里叶变换和分数阶傅里叶变换二者的优点,不仅能获得与Radon-傅里叶变换方法同样长的相参积累时间,而且对非平稳信号具有良好的能量聚集性,同时能补偿因目标机动产生的距离和多普勒走动。
3)基于检测前跟踪技术的长时间非相参积累检测[25-28]
该类方法的基本思想是:针对低信杂比条件下,单帧数据不能可靠检测目标的情况,在单帧不设门限或设较低门限;然后,根据目标运动在帧间的关联性,存储、处理和积累多帧数据;最后,与门限相比,在得到目标航迹估计的同时,完成对目标的判决。
该类方法解决的是目标在长时间运动时跨距离-方位-多普勒单元条件下的非相参积累检测问题。在多目标条件下,文献[27]提出了基于逐目标消除的多目标检测前跟踪方法,该方法针对近似直线运动的低可观测目标群,通过动态设定Hough参数单元的第二门限,进而采取逐目标消除的思想,将多目标检测前跟踪问题中的多目标航迹搜索转化为单目标航迹的逐个搜索,有效避免了多目标航迹之间的相互干扰。
2.4 从雷达分辨率的角度来分
随着雷达分辨率以及硬件处理能力的逐渐提高,雷达一维距离像以及合成孔径雷达(SAR)成像条件下的目标检测问题一直是雷达目标检测领域的研究热点。
1)距离扩展目标的检测[29-30]
在高距离分辨率雷达中,目标各散射中心回波在时域上是分离的,这为实现各散射点回波能量的积累,提高雷达对目标的检测能力提供了重要前提。图6给出了距离扩展目标的通用检测框图,主要包括自适应门限的形成和检测统计量的形成两部分。这两部分内容在高距离分辨率条件下面临如下几方面的难点:(1)如何精确估计增多了的目标参数;(2)如何在非高斯环境下控制虚警;(3)如何适应扩展目标的复杂运动模式;(4)如何提高对实际环境的适应性和对失配情况的鲁棒性;(5)研究计算复杂度较低的高效算法。

图6 距离扩展目标的通用检测框图
2)SAR图像中的舰船目标检测[31-32]
SAR图像舰船目标检测主要分为直接检测舰船本身和通过检测舰船尾迹来确定舰船两种途径。前者适用于舰船相对海面背景较为明显的情况;后者则要求舰船处于运动状态。多波段SAR图像融合是舰船目标检测技术的一个研究热点,其融合层次包括像元级、特征级和决策级,图7给出了多波段SAR图像三种融合层次的流程图。图8利用同一区域目标的C波段、L波段和P波段SAR图像演示了多波段SAR图像决策级融合检测的处理结果。
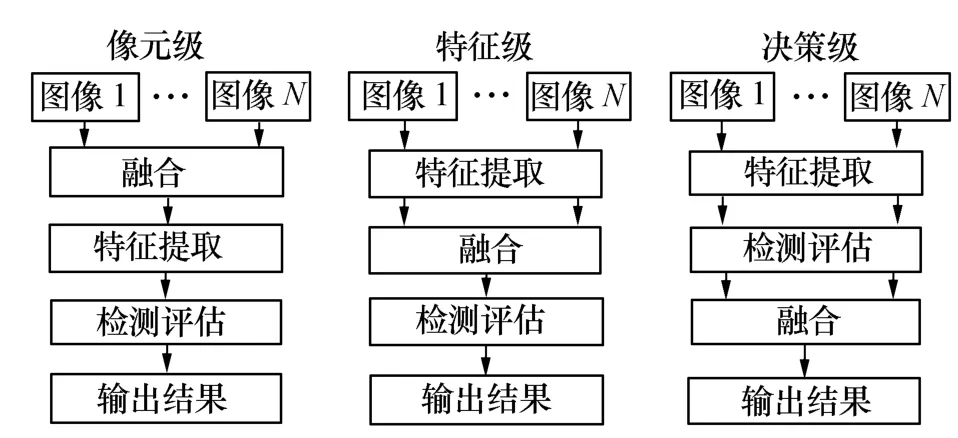
图7 多波段SAR图像三种融合层次的流程图

图8 多波段SAR图像决策级融合检测的处理结果
2.5 从照射源的角度来分
包括合作照射源条件下的目标检测与非合作照射源条件下的目标检测两类问题。大多数雷达目标检测都是在合作照射源条件下完成的,即雷达发射信号是已知的;然而,随着海上电磁环境的日益复杂以及雷达自身安全形势的日益严峻,非合作照射源条件下的海上目标检测逐渐成为了研究热点[33]。图9给出了合作式与非合作式双(多)基地雷达示意图。
挪威奥斯陆大学的Sindre Stromoy利用奥斯陆机场航管雷达作为非合作辐射源,设计了“搭车者”双基地雷达试验系统[34],对机场的民航飞机进行探测,并利用ADS-B民航数据进行验证,如图10所示。对采集的实测数据采用脉冲压缩、非相参积累、相参距离-多普勒积累等方法进行处理,检测到了机场附近的多架民航飞机,检测结果和ADS-B民航数据一致,从而证实了该类系统的有效性。

图9 合作式与非合作式双(多)基地雷达示意图
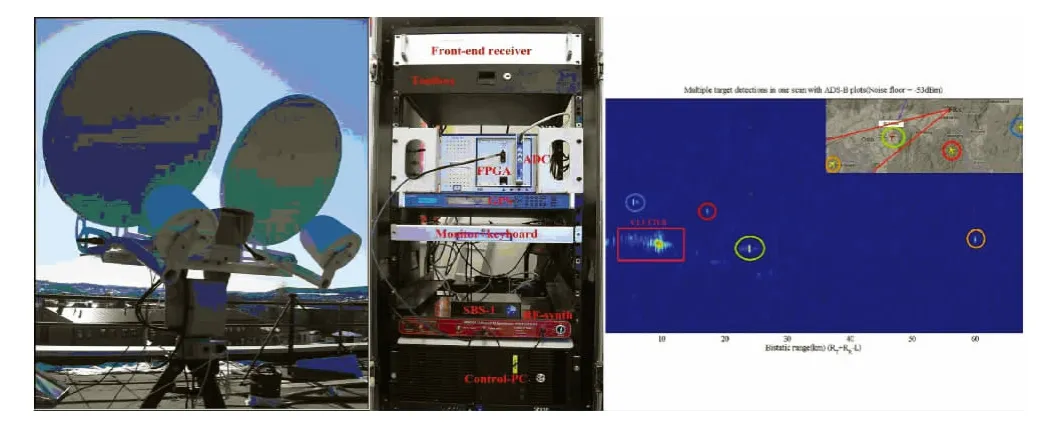
图10“搭车者”双基地雷达试验系统和民航飞机检测结果
2.6 从信息源的角度来分
对于海杂波背景中的目标检测问题来说,独立的信息来源越丰富,越有利于目标检测,其中,信息既包括关于目标的信息,也包括关于背景的信息。因此,从信息源的角度来看,雷达目标检测技术包括基于单雷达的目标检测技术、基于多雷达信息融合的目标检测技术(例如,空间分集MIMO雷达)、基于多种类型传感器信息融合的目标检测技术、基于知识辅助(Knowledge Aid,KA)的目标检测技术等。
1)空间分集MIMO雷达目标检测技术[35-37]
空间分集MIMO雷达目标检测技术利用复杂目标RCS随视角剧烈变化的特点,通过融合多个视角的观测数据来获得较为稳定的平均RCS条件下的检测性能。
2)基于知识辅助的空时自适应处理(Space-Time Adaptive Processing,STAP)技术[38-39]
基于知识辅助的空时自适应处理(KA-STAP)将专家系统的思想推广到多维滤波问题中,其典型的结构示意图如图11所示。传统STAP的核心是一种基于样本协方差矩阵的技术,而KA-STAP研究将潜在信息资源的利用充分扩展到全部自适应处理过程中,提高雷达对环境的感知能力。
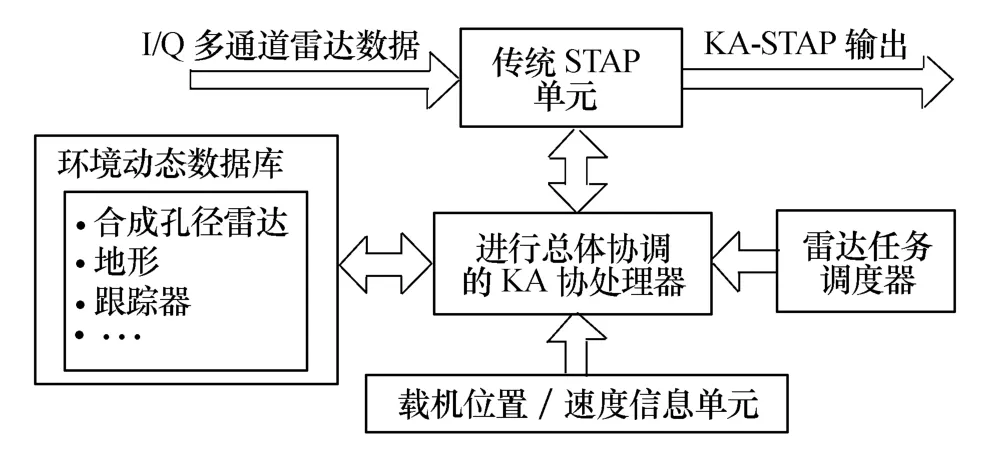
图11 典型KA-STAP结构示意图
多传感器相互印证的预警探测体系已成为发展趋势,而KA的思想正好符合这个趋势。然而,多种先验数据与雷达观测的同时配准及误差条件下的配准问题、先验知识的有效融合问题,都是目前基于KA的雷达目标检测技术需要解决的难题。文献[40]提出了利用地理信息系统(GIS)提供的先验信息进行参考数据筛选,如图12所示,尽量提取与待检测单元相近的均匀数据,获得的检测效果优于CA、GO、SO、OS 等常规CFAR 检测器[41]。

图12 基于GIS信息的参考数据筛选
2.7 从处理域的角度来分
包括基于单域处理的目标检测技术与基于多域联合处理的目标检测技术,前者只利用一个域中的信息或单个特征完成目标检测,例如:传统的CFAR技术(时域)、MTD 技术(频域)、分数阶傅里叶域[42-44],等;而后者则是联合多个域或多个特征来进行目标检测,例如:多维联合相参积累技术、多维CFAR处理技术[45]、变换域中的分形检测技术等。
1)空时频检测前聚焦[46]——一种多维联合相参积累技术
该技术将目标长时间相参积累问题转换为参数化模型匹配问题,在对应的参数空间中形成目标的“多维聚焦图像”,整合常规雷达信号处理的宽带波束形成、脉冲压缩和多普勒滤波等环节,完成对目标空间和运动参数的匹配估计,克服“三跨”效应,提高能量积累、目标检测、参数测量和特征提取等方面的处理性能。
2)多维联合CFAR海杂波抑制与目标检测方法
目前,CFAR方法大都基于距离维幅度数据,而实际上,雷达接收机接收到的数据包括距离维、脉冲维、方位维、扫描间(帧间)、多普勒等多维度数据。通过多维数据的选择来进行海杂波的抑制与目标检测,可降低虚警,提高检测概率。图13分析了可供海杂波中雷达目标技术利用的多维度信息,并给出了X波段非相参雷达综合利用空间、角度、帧间等多维度信息进行海杂波抑制与目标检测的处理结果。
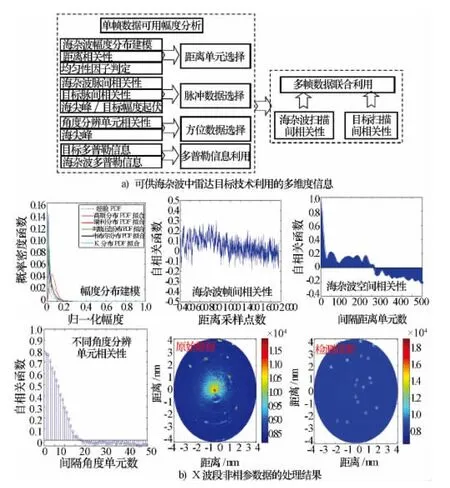
图13 多维联合CFAR海杂波抑制与目标检测实例
3)变换域分形检测技术[47]
变换域分形检测联合了海杂波与目标在变换域特性和分形特性上的差异,在证明海杂波具有变换域分形特征的前提下,充分利用变换域处理带来的信杂比改善和分形参数估计简单便捷的特点,提取变换域谱的分形特征(如Hurst指数等),以区分“纯海杂波”单元与“海杂波+目标”单元。图14对比了时域分形方法与频域分形方法的处理结果,显然,频域处理明显增强了小目标回波的分形特征。
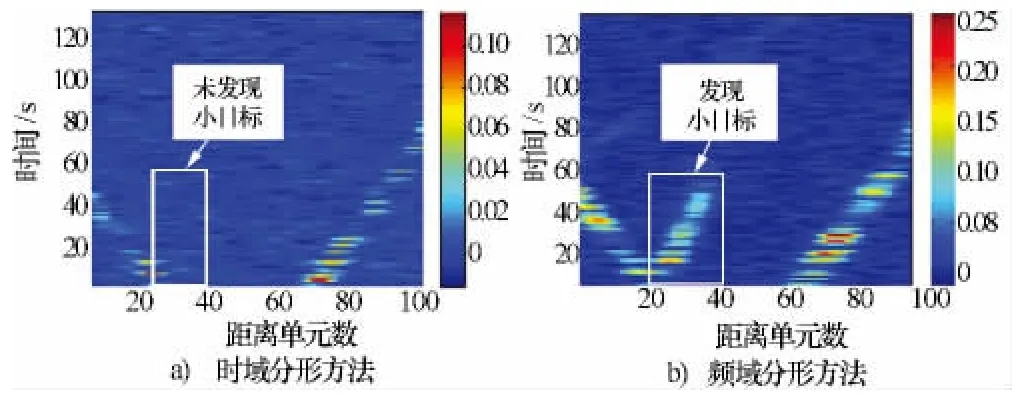
图14 时域分形方法与变换域分形方法检测效果比较
2.8 从目标特性的角度来分
包括针对常规目标、低可观测目标(隐身目标)、高速高机动目标以及慢速/漂浮目标的检测技术。例如:针对低可观测目标的检测技术有基于长时间相参积累的检测技术、基于长时间非相参积累的检测技术、基于非线性处理的检测技术、基于多域特征联合处理的检测技术等;针对高速高机动目标的检测技术有“三跨”条件下的长时间相参积累检测技术;针对慢速/漂浮目标的检测技术有基于非线性处理的检测技术、基于多域特征联合处理的检测技术等。
2.9 从背景类型的角度来分
按统计特性来分,包括白噪声/色噪声背景下的目标检测问题,高斯/非高斯杂波背景下的目标检测问题,以及干扰下的目标检测问题。按背景均匀性来分,包括均匀背景、多目标背景、杂波边缘背景下的目标检测问题。
在雷达海上目标检测的工程实际应用过程中,背景类型不可能是一种单一的形式,而是一种复杂非均匀的情况,这使得基于某种或某些背景类型而设计的检测器在实际应用中面临性能下降的问题,因此必须研究能适应海上复杂非均匀环境的目标检测技术[16]。
3 海杂波中雷达目标检测技术的发展趋势
下面主要从海杂波特性分析与建模、对海雷达信号处理技术以及雷达海上目标检测方法三个方面来阐述海杂波中雷达目标检测技术的发展趋势。
海杂波特性分析与建模方面的研究经历了从平稳到非平稳,从不相关到相关再到部分相关,从线性到非线性,从随机过程到混沌、分形,从幅度拟合到物理层面解释等多个发展阶段。目前,平稳性研究主要是分析高海况、低入射角、不同极化方式下海杂波的谱特性;相关性研究则主要是分析海杂波的时间和空间相关性;非线性分析主要是揭示实际系统与随机信号中广泛存在的自相似性和标度不变性;而物理层面的解释主要是揭示海杂波的形成机理,解释时变海面随电磁波反射的变化情况。
对海雷达信号处理技术研究从简单到复杂,不断延伸信号处理的维度,经历了从时、频、空的单域处理,再到时频、空时的二维处理,再到空时频的多域处理[48]的发展历程。
雷达海上目标检测技术方面,20世纪40年代提出了固定门限检测,然而,随着背景环境的日益复杂化,恒虚警率检测技术才能满足雷达对虚警率控制的要求,并逐渐应用到雷达装备中。20世纪50年代出现了以短时傅里叶变换为代表的变换域检测方法,后续又在压缩感知和稀疏表示的基础上发展到表示域处理技术。20世纪90年代,以分形和混沌为代表的非线性科学逐步应用到对海雷达目标检测中,并成为一个十分活跃和重要的分支。进入21世纪,出现了许多新的研究方向,如多传感器融合检测以及智能信号处理方法等,并逐渐走向工程应用。
总的来说,雷达对海探测技术的发展趋势可从两个方面进行概括:一方面是多维度信息的融合利用。融合利用多维度信息,可对回波信号进行更精细化描述,改善检测、估计、识别、评估和决策的性能。这些信息包括目标信息、背景信息以及雷达信号资源三部分。目标信息是指目标的RCS起伏特性、相关特性、运动学特性、变换域特征、非线性特征、微多普勒特征[49-50]等;背景信息是指背景的电磁散射特性、统计分布特性、相关特性、变换域谱特性、非线性特性等;雷达信号资源是指雷达发射信号本身所具有的空域信息(阵元间、雷达间)、时域信息(脉间、帧间)、谱信息、波形信息(波形形式)、极化信息、频率信息、波段信息等。另一方面是多手段融合处理提高检测性能。融合多种处理手段,有利于充分利用各层次信息,改善检测、估计、识别、评估和决策的性能。多处理手段的融合包括:(1)相参积累与非相参积累相结合,例如:短时间相参+长时间非相参等;(2)低分辨与高分辨相结合,例如:低分辨搜索+高分辨确认等;(3)自适应处理与知识辅助相结合,以便于融合多源信息;(4)统计处理与非线性处理相结合,以便于确定非线性特征的判别区域;(5)检测问题与分类问题相结合,将检测问题转化为二元分类问题,以适应非加性背景的情况。
4 结束语
海战场环境中的雷达目标检测问题是一个探索性强、难度大而又具有强烈背景需求的研究领域,当前该领域的研究已进入一个不断深化理论与实践的结合,深化现实与未来的联系,从而实现螺旋式科学推进的发展阶段。只有建立新的理念,在理论上有所突破,技术上有所发展,手段上有所创新,才能进一步推动海战场环境中的雷达目标检测技术的大发展!
[1] 焦世新.东亚安全的未来[J].国际关系研究,2014(2):74-89.Jiao Shixin.The prospects for the east Asian security[J].International Relations Quarterly,2014(2):74-89.
[2] 孙浩亮,杜 毅,薛建青.海战场信息环境的内涵及对潜艇作战的影响[J].四川兵工学报,2009,30(2):116-117.Sun Haoliang,Du Yi,Xue Jianqing.The intensions of the naval battlefield information and the impact for submarine operation[J].Journal of Sichuan Ordnance,2009,30(2):116-117.
[3] 赖剑菲,江 舟.GIS支持下的海洋水文气象信息成图模式的研究[J].测绘科学,2008,33(5):180-183,186.Lai Jianfei,Jiang Zhou.Recalization of geological section map model based GIS template[J].Sicence of Surveying and Mapping,2008,33(5):180-183,186.
[4] 姚纪欢.粗糙海面的电磁散射研究[D].西安:西安电子科技大学,2000.Yao Jihuan.Study of electronic scattering from rough sea surfaces[D].Xi'an:Xidian University,2000.
[5] 刘宁波,关 键,宋 杰,等.分形理论在目标检测中的应用[J].现代雷达,2012,34(2):12-18.Liu Ningbo,Guan Jian,Song Jie,et al.Application of target detection based on fractal theories[J].Modern Radar,2012,34(2):12-18.
[6] Xu Xiaoke.Low observable targets detection by joint fractal properties of sea clutter:an experimental study of IPIX OHGR datasets[J].IEEE Transactions on Antennas and Propagation,2010,58(4):1425-1429.
[7] Guan Jian,Liu Ningbo,Zhang Jian,et al.Multifractal correlation characteristic for radar detecting low-observable target in sea clutter[J].Signal Processing,2010,90(2):523-535.
[8] 刘宁波,李晓俊,李秀友,等.基于分形自仿射预测的海杂波中目标检测[J].现代雷达,2009,31(4):43-46,50.Liu Ningbo,Li Xiaojun,Li Xiuyou,et al.Target detection in sea clutter based on fractal self-affine prediction[J].Modern Radar,2009,31(4):43-46,50.
[9] 刘宁波,关 键,张 建.基于分形可变步长LMS算法的海杂波中微弱目标检测[J].电子与信息学报,2010,32(2):371-376.Liu Ningbo,Guan Jian,Zhang Jian.Low-observable target detection in sea clutter based on fractal-based variable stepsize LMS algorithm[J].Journal of Electronics& Information Technology,2010,32(2):371-376.
[10] 丁 昊,关 键,黄 勇.非平稳海杂波的消除趋势波动分析[J].电波科学学报,2013,28(1):116-123,189.Ding Hao,Guan Jian,Wang Yong.Detrended fluctuation analysis of non-stationary sea clutter[J].Chinese Journal of Radio Science,2013,28(1):116-123,189.
[11] Greco M,Bordoni F,Gini F.X-band sea-clutter nonstationarity:influence of long waves[J].IEEE Journal of O-ceanic Engineering,2004,29(2):269-283.
[12] 赵巨波,符 燕,耿文东.海杂波统计特性分析[J].现代雷达,2005,27(11):4-6.Zhao Jubo,Fu Yan,Geng Wendong.Analysis of sea clutter statistical characteristics[J].Modern Radar,2005,27(11):4-6.
[13] 谢常清,杨俊岭.雷达海杂波尖峰时频分布特性研究[J].现代雷达,2008,30(5):10-13.Xie Changqing,Yang Junling.A study on the time-frequency distribution of radar sea clutter spike[J].Modern Radar,2008,30(5):10-13.
[14] 许心瑜,张玉石,黎 鑫,等.L波段小擦地角海杂波KK分布建模[J].系统工程与电子技术,2014,36(7):1304-1308.Xu Xinyu,Zhang Yushi,Li Xin,et al.KK distribation modeling with L band low grazing sea clutter[J].Systems Engineering and Electronics,2014,36(7):1304-1308.
[15] Rosenberg L.Sea-spike detection in high grazing angle X-band sea-clutter[J].IEEE Transactions on Geoscience and Remote Sensing,2013,51(8):4556-4562.
[16] 王明宇.复杂环境下雷达CFAR检测与分布式雷达CFAR检测研究[D].西安:西北工业大学,2001.Wang Mingyu.Radar CFAR detection and distributed radar CFAR detection under complicated environments[D].Xi'an:Northwestern Polytechnical University,2001.
[17] Tugnait J K.Two-channel tests for common non-Gaussian signal detection[J].IEE Proceedings of Radar and Signal Porcessing,1993,140(6):343-349.
[18] Pournejatian N M,Nayebi M M.Fractal-multiresolution based detection of targets within sea clutter[J].Electronics Letters,2012,48(6):1-2.
[19] Shui Penglang,Li Dongchen,Xu Shuwen.Tri-featurebased detection of floating small targets in sea clutter[J].IEEE Transactions on Aerospace and Electronic Systems,2014,50(2):1416-1430.
[20] Robey F C,Fuhrmann D R,Kelly E J,et al.A CFAR adaptive matched filter detector[J].IEEE Transactions on Aerospace and Electronic Systems,1992,28(1):208-216.
[21] 刘宁波,关 键,宋 杰.扫描模式海杂波中目标的多重分形检测[J].雷达科学与技术,2009,7(4):277-283.Liu Ningbo,Gua Jian,Song Jie.Local multifractal characteristic of sea clutter in radar scanning mode for target detection[J].Radar Science and Technology,2009,7(4):277-283.
[22] 刘宁波,关 键,张 建.基于分形可变步长LMS算法的海杂波中微弱目标检测[J].电子与信息学报,2010,32(2):371-376.Liu Ningbo,Guan Jian,Zhang Jian.Low-observable target detection in sea clutter based on fractal-based variable stepsize LMS algorithm[J].Journal of Electronics& Information Technology,2010,32(2):371-376.
[23] Xu Jia,Yu Ji,Peng Yingning,et al.Radon-fourier transform for radar target detection,I generalized Doppler filter bank[J].IEEE Transactions on Aerospace and Electronic Systems,2011,47(2):1186-1202.
[24] Chen Xiaolong,Guan Jian,Liu Ningbo,et al.Maneuvering target detection via Radon-fractional Fourier transformbased long-time coherent integration[J].IEEE Transactions on Signal Processing,2014,62(4):939-953.
[25] 曲长文,黄 勇,苏 峰,等.基于随机Hough变换的匀加速运动目标检测算法及其性能分析[J].电子学报,2005,33(9):1603-1606.Qu Changwen,Huang Yong,Su Feng,et al.An algorithm and its performance analysis for detecting the target with constant acceleration using randomized Hough transform[J].Acta Electronica Sinica,2005,33(9):1603-1606.
[26] 曲长文,黄 勇,苏 峰.基于动态规划的多目标检测前跟踪算法[J].电子学报,2006,34(12):2138-2141.Qu Changwen,Huang Yong,Su Feng.Radar track-be foredetect algorithm of multitarget based on the dynamic programming[J].Acta Electronica Sinica,2006,34(12):2138-3141.
[27] 关 键,黄 勇.MIMO雷达多目标检测前跟踪算法研究[J].电子学报,2010,38(6):1449-1453.Guan Jian,Huang Yong.Track-before-detect algorithm in a MIMO radar multi-target environment[J].Acta Electronica Sinica,2010,38(6):1449-1453.
[28] 曲长文,黄 勇,苏 峰,等.基于坐标变换与随机Hough变换的抛物线运动目标检测算法[J].电子与信息学报,2005,27(10):1573-1575.Qu Changwen,Huang Yong,Su Feng,et al.An algorithm of detecting moving target with parabolic track using coordinate transform and randomized Hough transform[J].Journal of Electronics& Information Technology,2005,27(10):1573-1575.
[29] 简 涛,何 友,苏 峰,等.非高斯杂波下修正的SDD-GLRT距离扩展目标检测器[J].电子学报,2009,37(12):2662-2667.Jian Tao,He You,Su Feng,et al.Modified SDD-GLRT detector for rang-spread targets in non-Gaussian clutter[J].Acta Electronica Sinica,2009,37(12):2662-2667.
[30] 关 键,张晓利,黄 勇,等.一种距离扩展目标的稳健检测算法[J].信号处理,2011,27(12):1878-1883.Guan Jian,Zhang Xiaoli,Huang Yong,et al.A robust detection method for range-spread targets[J].Signal Processing,2011,27(12):1878-1883.
[31] 张 琦,高 贵,匡纲要.SAR图像目标的融合检测方法[J].电子与信息学报,2006,28(10):1802-1805.Zhang Qi,Gao Gui,Kuang Gangyao.A fusion method for target detection in SAR image[J].Journal of Electronics &Information Technology,2006,28(10):1802-1805.
[32] 刘向君,常文革,常玉林.基于决策级融合的多波段SAR目标检测方法[J].现代雷达,2007,29(2):22-25.Liu Xiangjun,Chang Wenge,Chang Yulin.A multi-band SAR target detection method based on decision fusion[J].Modern Radar,2007,29(2):22-25.
[33] 宋 杰,何 友,蔡复青,等.基于非合作雷达辐射源的无源雷达技术综述[J].系统工程与电子技术,2009,31(9):2151-2156,2180.Song Jie,He You,Cai Fuqing,et al.Overview of passive radar technology based on non-cooperative radar illuminator[J].Systems Engineering and Electronics,2009,31(9):2151-2156,2180.
[34] Sindre Stromoy.Hitchhiking bistatic radar[D].OSLO:U-niversity of OSLO,2013.
[35] Li Jian,Petre S.MIMO radar signal processing[M].US:John Wiley& Sons Inc,2009.
[36] 汤 俊,伍 勇,彭应宁,等.MIMO雷达检测性能和系统配置研究[J].中国科学F辑,信息科学,2009,39(7):776-781.Tang Jun,Wu Yong,Peng Yingning,et al.A study on detection performance and system configuration of MIMO radar[J].Science in China Series F:Information Sciences,2009,39(7):776-781.
[37] Guan Jian,Huang Yong.Detection performance analysis for MIMO radar with distributed apertures in Gaussian colored noise[J].Science in China Series F:Information Sciences,2009,52(9):1689-1696.
[38] Wicks M C,Swamy M R,Adve R,et al.Space-time adaptive processing:a knowledge-based perspective for airborne radar[J].IEEE Signal Processing Magazine,2006,23(1):51-65.
[39] Guerci J R,Baranoski E J.Knowledge-aided adaptive radar at DARPA:an overview[J].IEEE Signal Processing Magazine,2006,23(1):41-50.
[40] 李青华,姚云萍.一种基于知识辅助的CFAR检测器[J].雷达科学与技术,2012,10(1):88-93.Li Qinghua,Yao Yunping.A knowledge-aided CFAR detector[J].Radar Science and Technology,2012,10(1):88-93.
[41] 何 友,关 键,孟祥伟,等.雷达目标检测与恒虚警处理[J].北京:清华大学出版社,2011.He You,Guan Jian,Meng Xiangwei,et al.Radar target detetion and CFAR processing[M].Beijing:Tsinghua University Press,2011.
[42] Guan Jian,Chen Xiaolong,Huang Yong,et al.Adaptive fractional Fourier transform-based detection algorithm for moving target in heavy sea clutter[J].IET Radar,Sonar and Navigation,2012,6(5):389-401.
[43] 陈小龙,关 键,刘宁波,等.基于FRFT的LFM信号自适应滤波算法及分析[J].现代雷达,2010,32(12):48-53,59.Chen Xiaolong,Guan Jian,Liu Ningbo,et al.Adaptive filtering algorithm for LFM signal and performance analysis based on FRFT[J].Modern Radar,2010,32(12):48-53,59.
[44] 陈小龙,王国庆,关 键,等.基于FRFT的动目标检测模型与参数估计精度分析[J].现代雷达,2011,33(5):39-45.Chen Xiaolong,Wang Guoqing,Guan Jian et al.Analysis of model of omving target detection and precision of paramenter estimation based on FRFT[J].Modern Radar,2011,33(5):39-45.
[45] Kronauge M,Rohling H.Fast two-dimensional CFAR procedure[J].IEEE Transactions on Aerospace and Electronic Systems,2013,49(3):1817-1823.
[46] 许 稼,彭应宁,夏香根,等.空时频检测前聚焦雷达信号处理方法[J].雷达学报,2014,3(2):129-141.Xu Jia,Peng Yingning,Xia Xianggen,et al.Radar signal processing method of space-time-frequency focus-before-detects[J].Journal of Radar,2014,3(2):129-141.
[47] Chen Xiaolong,Guan Jian,He You,et al.Detection of low observable moving target in sea clutter via fractal characteristics in FRFT domain[J].IET Radar,Sonar and Navigation,2013,7(6):635-651.
[48] Thayaparan T,Kennedy S.Detection of a manoeuvring air target in sea-clutter using joint time-frequency analysis techniques[J].IEE Proceedings-Radar,Sonar and Navigation,2004,151(1):19-30.
[49] Chen Xiaolong,Guan Jian,Bao Zhonghua,et al.Detection and extraction of target with micro-motion in spiky sea clutter via short-time fractional Fourier transform[J].IEEE Transactions on Geoscience and Remote Sensing,2014,52(2):1002-1018.
[50] 陈小龙,关 键,何 友.微多普勒理论在海面目标检测中的应用及展望[J].雷达学报,2013,2(1):123-134.Chen Xiaolong,Guan Jian,He You.Applications and prospect of micro-motion theory in the detection of sea surface target[J].Journal of Radar,2013,2(1):123-134.
猜你喜欢
科学与信息化(2021年30期)2021-12-24
动漫星空(兴趣百科)(2020年11期)2020-11-09
电子制作(2019年15期)2019-08-27
趣味(数学)(2019年12期)2019-04-13
小学生学习指导(低年级)(2018年12期)2018-12-29
现代装饰(2018年11期)2018-11-22
火控雷达技术(2016年3期)2016-02-06
西北工业大学学报(2015年3期)2015-12-14
百科探秘·航空航天(2015年4期)2015-11-07