
一种遥感卫星偏流角修正的仿真分析方法
2013-12-29 04:13朱兴鸿邸国栋陆春玲
航天器工程 2013年1期
朱兴鸿 邸国栋 陆春玲
(航天东方红卫星有限公司,北京 100094)
1 引言
在遥感卫星绕地球运转时,地球的自转会使相机相对被摄景物的移动方向与相机运动的投影线速度方向不一致,而两个方向的夹角称为偏流角[1]。随着遥感卫星成像质量要求的提高和时间延迟积分CCD(TDICCD)器件在遥感卫星上的广泛使用,卫星偏流角的修正误差所造成的成像系统调制传递函数(MTF)的衰退,已成为影响成像质量的关键因素之一。
国内外的相关研究在偏流角的几何解析方面给出了比较详细的分析。文献[2-3]给出了基于几何分析和公式推演进行计算的偏流角分析方法,其主要的缺点是过多地依赖于假设,如地球是个理想椭球体,卫星轨道为理想圆轨道等。各种假设会为计算结果带来一定的偏差,一般只能作为定性的分析,无法使用这种低精度的结果来验证星上算法的正确性和精度。此外,随着卫星侧摆、俯仰等姿态机动能力的提高,几何分析方法推导过程复杂、精度偏低的不足就更加显现出来。针对上述问题,本文提出了一种偏流角修正的仿真分析方法,重点解决如下3个方面的问题。
(1)通过结合仿真中的高精度模型,解决在几何解析分析过程中对模型假设的依赖问题;
(2)从成像的物理原理出发,解决偏流角修正过程的物理意义不够明确的问题;
(3)解决在姿态机动、椭圆轨道等特殊任务中遥感器的偏流角分析问题。
2 偏流角的产生及其修正误差的影响
2.1 偏流角的产生
图1(a)为星下点成像时惯性坐标系下偏流角的产生示意图。卫星在轨道上从t1时刻的S1点运行到t2时刻的S2点过程中,卫星的星下点成像对象从t1时刻的P1点变为t2时刻的P2点,因此,在t1时刻卫星运动造成的成像点(不受地球自转影响)相对于卫星的运动速度Vi,其大小可表示为

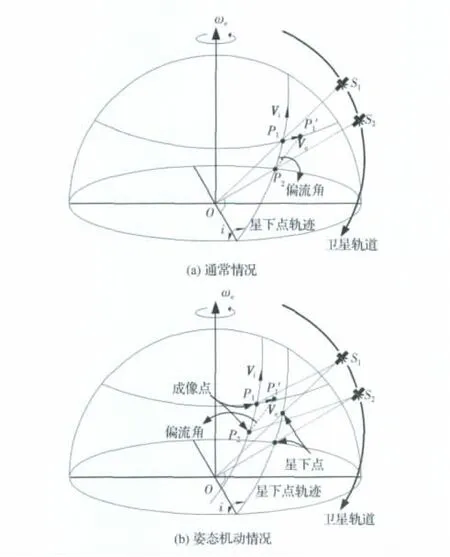
图1 偏流角产生示意图Fig.1 Schematic diagram of drift angle generation
由于地球自转,地球表面的P1点存在一个牵连速度Ve,此速度使P1点在t2时刻将运行到P′1点,因此,在t1时刻的成像点相对于卫星的总运动速度就是由Ve和Vi合成的速度,合成速度与Vi的夹角就是卫星的偏流角[4]。当卫星存在姿态机动时,成像点轨迹偏离了星下点轨迹,因此卫星的偏流角应该按照此时的卫星、成像点、地球三者的运动关系进行分析,如图1(b)所示。
2.2 偏流角修正误差对成像质量的影响
当偏流角的修正有一定误差时,会在TDICCD线阵方向上存在一个残留的像移速度,因此在TDICCD积分过程中由像移引起的MTF 衰退DMTF可用式(2)计算。

式中:f为TDICCD 线阵方向(读出方向)的空间频率;s为曝光时间内的像移量;NTDI为成像的TDICCD级数;derror为相邻两次曝光在TDICCD 线阵方向的位置误差;Vshift为TDICCD 线阵方向像移速度;Tint为积分时间。
通过对TDICCD 相机成像过程进行空间建模[5],获得不同积分级数下偏流角修正误差造成的MTF衰减如图2所示。可以看出,偏流角的高精度修正对提高成像质量至关重要[6]。
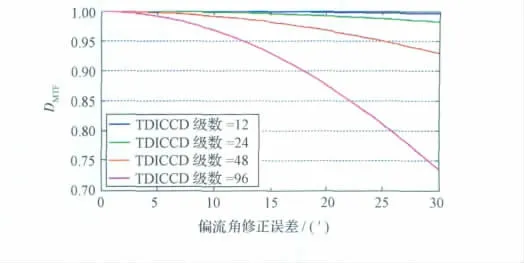
图2 不同积分级数下的偏流角修正误差造成的MTF衰减Fig.2 MTF degradation caused by drift angle adjustment error at different integration levels
3 偏流角修正的仿真分析
3.1 偏流角修正物理过程分析
TDICCD 相机是一种具有多重级数延时积分功能的线阵CCD 相机。其工作原理是:当相机随卫星向前运动时,对地面同一目标进行多次曝光成像,采用同步多级积分来增加成像积分时长,以提高接收能量和信噪比。由于TDICCD 相机在低照度情况下具有良好的成像性能,近年来被广泛应用于新一代高分辨率遥感卫星成像[7-8]。
对于一个TDICCD 器件,成像中偏流角影响及其修正的原理如图3所示。修正的目的就是通过卫星的姿态调整,将CCD 的方向修正到与成像点相对于CCD 运动速度完全垂直,消除CCD 成像过程中的横向像移,从而使图像在TDICCD 的多次积分中始终维持图像相位的稳定性[9],这个修正的角度就定义为偏流角修正。需要注意的是,图3中的角度和矢量间的关系都是在CCD 焦平面上定义的,因此,虽然偏流角可以用来表征遥感卫星成像目标的运动特点,但是此偏流角只能直接作为星下点成像偏流角修正。卫星侧摆时成像点的速度并不在CCD 的焦平面上,要首先进行投影,才能通过其与CCD 间的关系得到偏流角修正,如图4所示。
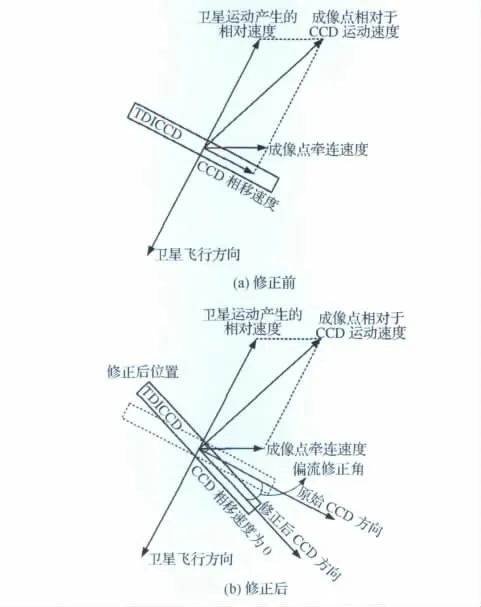
图3 成像过程中偏流角影响及其修正原理Fig.3 Principle of drift angle influence and relative adjustment in imaging

图4 偏流角修正的投影关系示意图Fig.4 Schematic diagram of projection on drift angle adjustment
图4中的平面为CCD焦平面,Va为分析偏流角时成像点相对于卫星的运动速度,NCCD为TDICCD的法线方向,VaPJ为Va在CCD 成像平面上的投影。根据修正的目的,通过修正使NCCD与VaPJ重合,这样,NCCD与VaPJ间的夹角即为实际的偏流角修正角度。
3.2 仿真方法及流程
本文提出的仿真方法,从上文分析的成像物理原理出发,解决偏流角修正的计算问题。仿真以成像对象的运动状态为基础,分别获得其在惯性坐标系下由于地球自转和卫星运动产生的相对于卫星的运动速度,进一步分析成像对象相对于CCD 的运动关系,并以消除CCD 横向像移为基本出发点来分析偏流角修正。
仿真过程中使用了STK 软件与MATLAB 软件,通过MATLAB 软件控制STK 软件进行交互,并对获取的STK 软件数据进行分析,仿真交互及分析过程如图5所示。

图5 仿真交互及分析流程图Fig.5 Flow chart on simulation interaction and analysis
4 示例
4.1 650km 太阳同步轨道卫星
在仿真中使用了STK 软件作为轨道分析软件,软件中已经包含了高精度的地球模型。为了能够更好地模拟真实卫星的成像特性,在仿真场景中选取了轨道高度为650km 的太阳同步轨道,轨道降交点地方时选择可见光卫星成像条件较好的10:30,卫星场景如图6所示。示例中卫星具有侧摆机动能力,星上仅配置一台TDICCD 相机,取卫星本体坐标系的XOY平面为CCD 的焦平面。卫星对星下点成像以及进行侧摆机动(+15°、+25°和+35°)时,通过仿真获得偏流角和偏流角修正随纬度变化的关系,如图7所示。

图6 运行在650km 高太阳同步轨道卫星的仿真场景Fig.6 Simulation scenario of satellite in 650km SSO

图7 650km 高太阳同步轨道卫星的偏流角和偏流角修正仿真结果Fig.7 Simulation results of drift angle and drift angle adjustment for satellite in 650km SSO
从图7可以看出:当卫星对星下点成像时(无机动),偏流角和偏流角修正角度两者的曲线重合;卫星进行姿态机动,会造成成像点运动矢量与卫星CCD 焦平面的夹角关系发生变化,因此在进行投影时就会直接影响到偏流角修正,并且这种影响随着卫星星下点纬度的减小而增加,在赤道位置达到最大。因此,在卫星进行姿态机动时,不能使用星下点的偏流角直接进行修正,否则形成的偏流角修正误差会影响成像质量,特别是在大角度侧摆机动时,此修正误差将使系统MTF大幅度衰退。
4.2 仿真方法在复杂任务中的应用
本文提出的仿真方法是基于物理成像原理进行分析的,因此还能在众多复杂任务中使用,以一颗临界倾角[10]太阳同步大椭圆轨道的卫星(见图8)为例。在模型中设置卫星的轨道及姿态参数后,使用与4.1节相同的交互仿真方法,即可仿真获得偏流角以及偏流角的分析数据,在星下点成像(无机动)和侧摆25°成像时的结果如图9所示。此外,该仿真方法还可以在相机偏场安装、姿态机动过程成像等多种复杂任务环境中分析系统的偏流角修正,从而在卫星系统任务分析、星上偏流角修正算法验证、在轨误差分析补偿方面发挥重要作用。
图8 临界倾角太阳同步轨道卫星仿真场景Fig.8 Simulation scenario of critical inclination SSO satellite
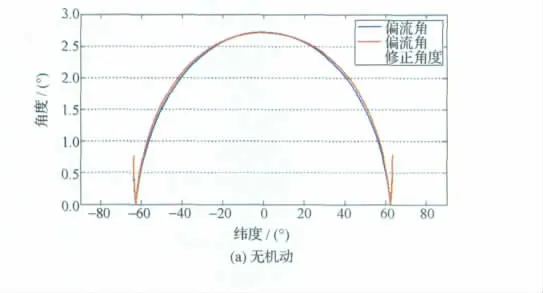

图9 临界倾角太阳同步轨道卫星的偏流角和偏流角修正仿真结果Fig.9 Simulation results of drift angle and drift angle adjustment for satellite in critical inclination SSO
5 结束语
本文在从运动机理分析偏流角和偏流角修正的基础上,提出了一种基于成像点惯性运动状态、使用MATLAB和STK 软件交互进行仿真的方法,并结合2种卫星场景给出了偏流角的分析结果。基于仿真分析结果,可以对星上使用的偏流角修正算法进行验证评估,以完善链路成像质量预估模型;也可以进一步优化星上算法,为提高卫星在轨成像质量提供支持。在本文的仿真场景中,没有将遥感器的安装角度、安装偏差等系统初始状态加入模型,而在实际使用中需要综合考虑,在分析视轴偏流角的基础上研究全视场偏流角偏差的影响。如果要获得更高的精度,还应结合地球的数字高程模型(DEM)。这些也将是后续研究的重点,以得到与实际卫星状态更接近的系统分析结果,为提高遥感卫星的成像质量奠定基础。
(References)
[1]Longo J,Stern F.Effects of drift angle on model ship flow[J].Experiments in Fluids,2002,32(5):558-569
[2]袁孝康.星载TDI-CCD 推扫相机的偏流角计算与补偿[J].上海航天,2006,23(6):10-13
Yuan Xiaokang.Calculation and compensation for the deviant angle of satellite borne TDI-CCD push scan camera[J].Aerospace Shanghai,2006,23(6):10-13 (in Chinese)
[3]樊超,李英才,易红伟.空间相机中的偏流角分析[J].红外与激光工程,2006,35(10):216-220
Fan Chao,Li Yingcai,Yi Hongwei.Analysis of drift angle on space camera[J].Infrared and Laser Engineering,2006,35(10):216-220(in Chinese)
[4]Hu Jun,Cao Xiaotao,Wang Dong,et al.Dynamic closed-loop test for real-time drift angle adjustment of space camera on the Earth[C]//Proceedings of 5th International Symposium on Advanced Optical Manufacturing and Testing Technologies:Optical Test and Measurement Technology and Equipment.Washington D.C.:SPIE,2010:76560Z
[5]邸国栋,朱兴鸿.TDICCD 相机安装精度对系统调制传递传函的影响.[J]航天器工程,2012,21(4):59-62
Di Guodong,Zhu Xinghong.Analysis on system MTF degradation effects of assembly precision of TDICCD camera[J].Spacecraft Engineering,2012,21(4):59-62(in Chinese)
[6]杨秀彬,贺小军,张刘.偏流角误差对TDI CCD 相机成像的影响与仿真[J].光电工程,2008,35(11):45-50
Yang Xiubin,He Xiaojun,Zhang Liu.Effect and simulation of the deviant angle error on TDI CCD cameras image[J].Opto-Electronic Engineering,2008,35(11):45-50(in Chinese)
[7]佟首峰,李德志,郝志航.高分辨力TDI-CCD 遥感相机的特性分析[J].光电工程,2001,28(4):64-67
Tong Shoufeng,Li Dezhi,Hao Zhihang.Analysis on the characteristics of TDI-CCD high-resolution camera for remote sensing[J].Opto-Electronic Engineering,2001,28(4):64-67(in Chinese)
[8]杨秉新.TDICCD 在航天遥感器中的应用[J].航天返回与遥感,1997,18(3):15-18
Yang Bingxin.Applications of TDICCD in space remote sensors[J].Spacecraft Recovery & Remote Sensing,1997,18(3):15-18(in Chinese)
[9]李友一.空间相机中的偏流角控制[J].光学精密工程,2002,10(4):402-406
Li Youyi.Drift angle control for space cameras[J].Optics and Precision Engineering,2002,10(4):402-406(in Chinese)
[10]章仁为.卫星轨道姿态动力学与控制[M].北京:北京航空航天大学出版社,1998:24
Zhang Renwei.Satellite orbit and attitude dynamics and control[M].Beijing:Beihang University Press,1998:24(in Chinese)
猜你喜欢
Journal of Palaeogeography(2022年1期)2022-03-25
快乐语文(2021年35期)2022-01-18
空间科学学报(2020年6期)2020-07-21
空间科学学报(2020年6期)2020-01-08
环球时报(2019-12-05)2019-12-05
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
摄影之友(影像视觉)(2017年1期)2017-07-18
北京航空航天大学学报(2016年9期)2016-11-16
制导与引信(2016年3期)2016-03-20
