GNSS导航信号接收机的基本性能检验
2013-12-23 06:15:52武汉大学测绘学院刘基余
数字通信世界 2013年6期
武汉大学测绘学院 刘基余

我国区域覆盖的北斗卫星导航系统于2012年12月27日宣布建成后,它的用户设备──北斗导航信号接收机也随之迅速发展;其中,以所谓“多模接收机”(实际上就是GNSS导航信号接收机)发展更为迅速。对于研制者而言,他们需要确知自己的产品竞争力;对于使用者而言,他们需要确知所购产品的适应性。因此,GNSS导航信号接收机的基本性能,就成为大家的关注焦点。由于北斗卫星导航信号及其导航电文与GPS具有许多相似之处,两者构成的GNSS导航信号接收机也易检测。笔者基于对GPS信号接收机基本性能的了解和对它的检测实践,提出了检验GNSS导航信号接收机基本性能的零基线检测法和超短基线检测法,供实用参考。
一、GNSS接收机的理想性能
GNSS导航信号接收机的理想性能,笔者认为,可以概括成如下所述:
1. 观测量多
在研制GNSS导航信号接收机时,依据其应用目的,选择合乎需求的较多观测量。一般说来,GNSS导航信号接收机主要是指能够接收、捕获、跟踪和测量GPS、GLONASS、北斗和Galileo导航信号的卫星导航用户设备;此处论述它们的观测量,不可能一一而述,只能够以GPS信号为例,予以说明之,且仅对GPS第一、第二导航信号L1/L2而言(GPS L5信号请见笔者所著的【GPS卫星导航定位原理与方法】一书〖北京科学出版社于2013年1月出版发行〗的相关章节)。目前GPS L1/L2信号可供民间用户选用的观测量如表1所述。

表1 GPS基本观测量
20世纪80年代末期所生产的GPS测地接收机,有的不提供“站星距离粗测值”,而要求用户输入点位精度为±150公里的概略值,用于该种GPS测地接收机的点位精密解算。由此可见,也非每位研制者都关注“站星距离粗测值”,而予以测量之。笔者认为,对于各类导航型接收机,必须精细测得“站星距离粗测值”!否则,无法实现运动载体的精确导航。
2. 具有同时跟踪和测量4颗以上有效GNSS卫星 的能力
一台GNSS导航信号接收机,能否同时跟踪和测量多颗GNSS卫星,取决于它具有的波道数。根据美国《GPS World》期刊于2012年第一期的统计报告可知,在58家生产厂商所生产的483种GNSS信号接收机中,Trimble公司的仅重1.75kg的NetR9 TI-1基准接收机具有440个波道,能够接收GPS、GLONASS、Galileo、北斗、QZSS、WAAS和EGNOS导航信号,以及OmniSTAR VBS、HP和XP差分改正信号。由此看来,现代的GNSS导航信号接收机,同时跟踪和测量4颗以上有效GNSS卫星是完全可行的;但是,如何剔除所接收到的病态GNSS卫星,则是一个必须解除的难题;否则,稳定而可靠的高精度导航定位,就是一句空话。对于GPS卫星而言,它们的导航电文第四、第五子帧较详细地给出了所发信号各个分量的“健康状况”(详见笔者前述著作的表3.1.1),依此即可剔除所接收到的病态GPS卫星。
3. 具有弱信号的捕获测量能力
现代的GNSS导航信号接收机,需要在许多复杂环境条件下使用;例如,需要在深山峡谷或市镇闹区进行卫星导航定位测量。在这种场合下,GNSS导航信号的强度往往低于-160dBw,GNSS导航信号接收机就需要具有弱信号的捕获测量能力。此外,GNSS卫星所发送的几种导航信号电平也不相同,需要认真思考解决方法;例如,根据GLONASS ICD 2008 Edition 5.1可知,GLONASS卫星L1/L2最低接收功率电平(dBw)随卫星高度角(度)变化如图1所示。由该图可见,当GLONASS卫星高度角为30°时,其L1信号的最低接收功率电平是-160dBw,而L2信号的最低接收功率电平是-167.5dBw左右。如果GNSS导航信号接收机不具备较强的弱信号捕获测量能力,就难以实现GLONASS卫星的双频测量,不能够匹配其他GNSS卫星的双频率测量成果。目前已经研发了专用于捕获GNSS卫星弱信号的相干累加、非相干累加、差分相干累加和基于广义差分相干累加等算法,并成功地用于作业实践。
4. 具有多频的接收测量能力
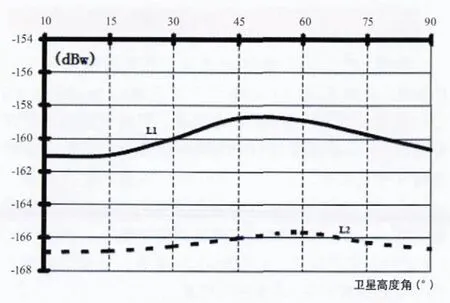
图1 GLONASS卫星的L1/L2最低接收功率电平(dBw)随卫星高度角(°)的变化
单频接收机的制作成本和售价虽较低,但它们不适宜用于厘米级测量精度的应用场合,如站间距离为百余公里以上的测地应用;又如,星载GNSS的定轨测量,等等。对于这种高精度的应用场合,必须采用多频GNSS导航信号接收机,才能够有效地削弱电离层效应的精度损失。现行的GNSS卫星均能够提供三种导航定位信号,因此,只要GNSS导航信号接收机具有捕获接收三种导航定位信号的能力,就能够实现三个载波频率的导航定位测量。
5. 内存容量大
在20世纪90年代生产的GPS信号接收机,其内存容量一般为0.5Mb~80Mb;它们的存储时间长短,既取决于GPS定位数据的更新率,又取决于被测卫星的多少,例如,当内存容量为1Mb,被测卫星为5颗,采用15秒数据更新率,可存储14小时的GPS数据;若其他条件不变,仅改用1秒数据更新率,则只能存储56分钟的GPS数据。但是,Trimble 5700 GPS信号接收机,采用内置小型的48MB Flash存储器,可以存储对6颗卫星以15秒更新率作双频(L1/L2)观测的1080小时(45天)的GPS数据;若连续运行的基准站(CORS),采用Trimble 5700 GPS信号接收机,则可选用能够存储2750小时观测数据的Flash存储器,其所存储的数据仍为对6颗卫星以15秒更新率作双频(L1/L2)观测的GPS数据。由此看来,随着内置小型存储器的迅速发展,GNSS导航信号接收机能够实施大容量的内置存储,而为用户实用便利。
6. 无故障时间长
平均无故障时间MTBF(mean time been without failure)表征GNSS导航信号接收机的耐用性;美国军用标准定为MTBF≥13000小时;而现行的民用GNSS导航信号接收机的平均无故障时间一般为60000小时左右。
7. 测量精度高
精度,表示一个量的观测值与其真值接近或一致的程度。正如前述,Trimble公司的仅重1.75kg的NetR9 TI-1基准接收机,具有440个波道,而能够接收多种卫星导航信号,以致它的GNSS测距码差分定位的二维位置精度能够达到�(25cm+1PPM),高程测量精度为�(50cm+1PPM);它的GNSS静态定位的二维位置精度能够达到�(3mm+0.1PPM),高程测量精度为�(3.5mm+0.4PPM)。笔者认为,这代表GNSS导航信号接收机现代的高精度测量水平,值得我们借鉴。
8. 作业适应性强
一台较理想的GNSS导航信号接收机,既能作静态定位,又能作动态测量,也即能在高低动态环境条件下作7维状态参数测量;而且具有较强的抗客体干扰能力。干扰GPS信号接收的信号(如表2所示),有人为射频干扰类(Jamming)和客体射频干扰类(Unintentional RF Interference)。后者是一些客观存在的无线电发送设备引起的电子干扰;例如,1996年2月26日,我们在海口市一个高层建筑物上拟设立一个GPS基准站,首先用AOA公司生产的SNR-8000 GPS信号接收机进行试测,但不能接收到GPS信号;当用Trimble 4000SSE GPS 信号接收机安设在这同一点位上时,却能够正常地捕获和跟踪到GPS信号,而实现GPS导航定位。后续的调查研究表明,近处有一座无线电发射台。由此可见,不同类型的GPS信号接收机,其抗电子干扰能力相差较大。

表2 GNSS卫星导航信号的射频干扰源及其类型
9. 低功耗,小而轻
非手持式的GNSS导航信号接收机,应具有交直流供电的适应能力,而且对供电电源的电压范围不作过高要求。最好在GNSS导航信号接收机内部安设有锂电池,可供它在野外作业十来小时。而且整机的功耗小,重量轻,以便野外作业使用。
10. 数据处理软件功能强
GNSS导航信号接收机的内置软件,既能解算用户的位置、速度和时间,又能作数据编辑、数据压缩、数据管理、载波相位测量的周跳探测及其注记、仪器自诊断及其控制。
GNSS导航信号接收机的测后数据处理软件,能够作观测数据的初加工、预处理、基线向量解、网平差计算、坐标变换(包括从通用横轴墨卡托平面坐标变换成高斯平面坐标),等等。
二、GNSS接收机的质量指标
GNSS导航信号接收机的质量优劣,主要表现在它自身测量站星距离的误差大小。当以GPS信号接收机为例时,在简化公式推导的情况下,用L1-P码和L2-P码测得的伪距分别为

式中,ρj为GPS信号接收天线至第j颗GPS卫星的真实距离;IjL1为L1-P码伪距的电离层效应的距离偏差;IjL2为L2-P码伪距的电离层效应的距离偏差;Mj
L1-P为L1-P码伪距测量的质量指数,它表明多路径误差和接收机L1-P码伪距测量误差的大小;MjL2-P为L2-P码伪距测量的质量指数,它表明多路径误差和接收机L2-P码伪距测量误差的大小。
用P-L1载波和P-L2载波测得的伪距分别为

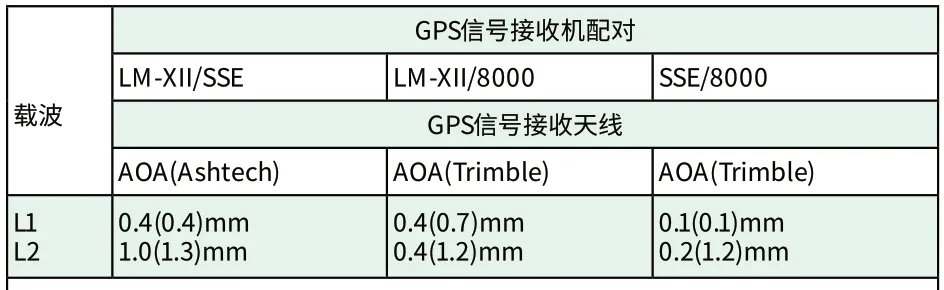
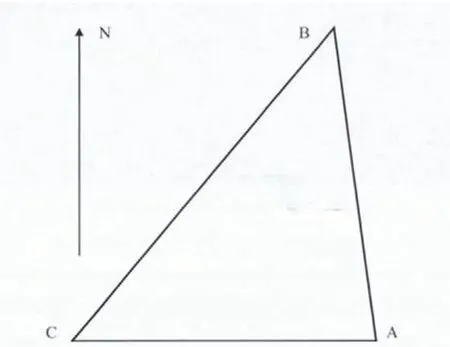
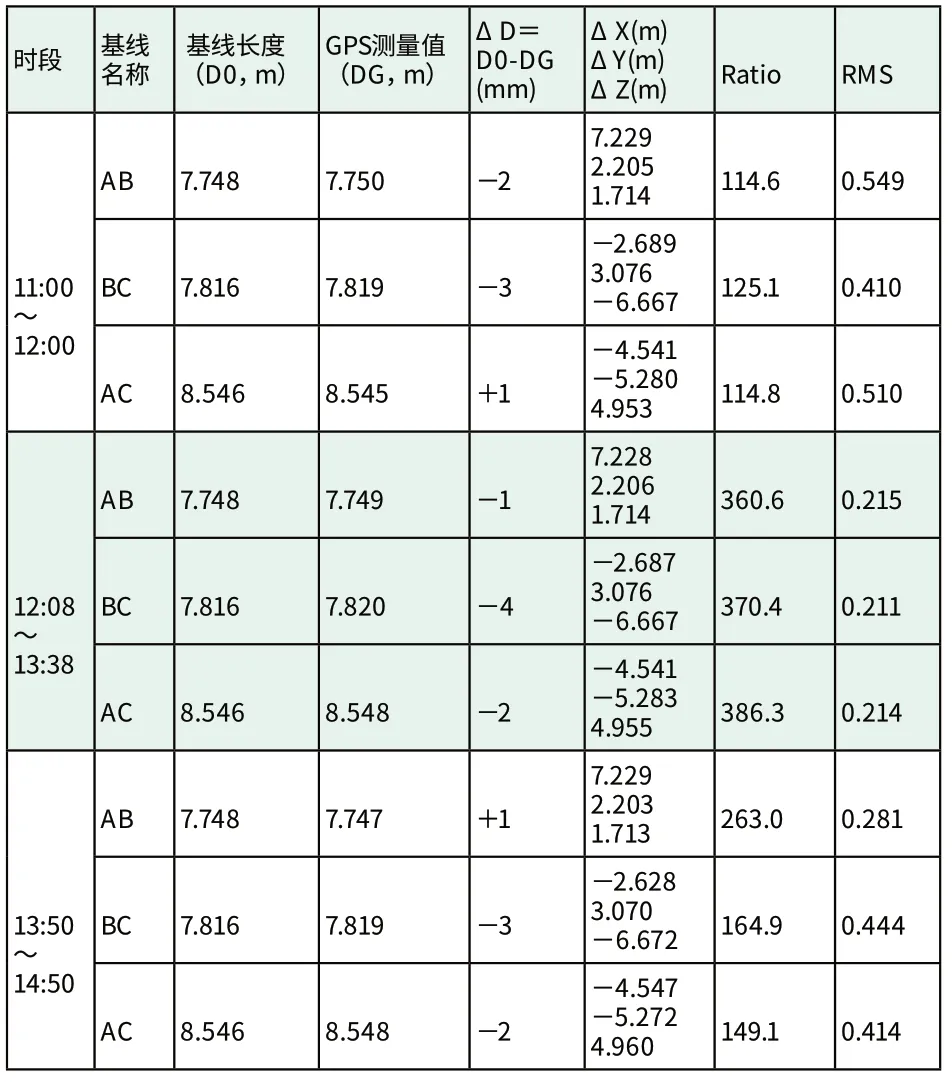
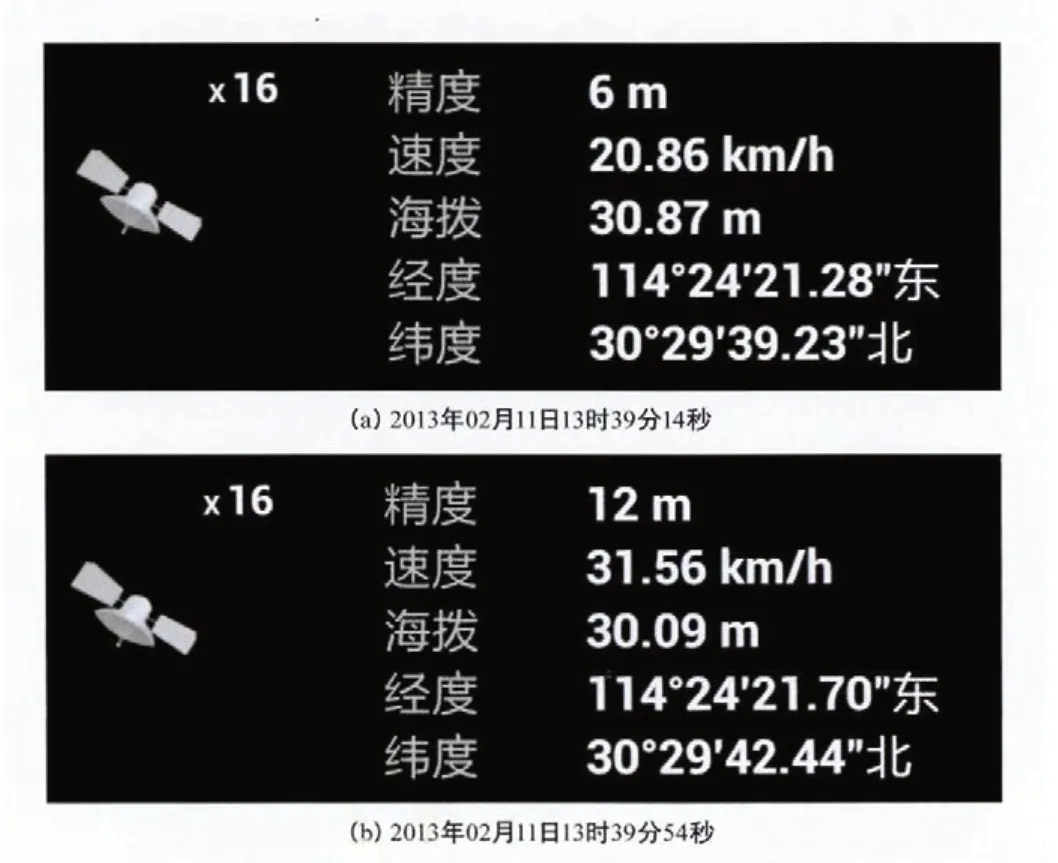
式中,AjL1为P-L1载波的整周模糊度偏差距离;AjL2为P-L2载波的整周模糊度偏差距离;mjP-L1为P-L1载波伪距测量的质量指数,且知,mjP-L1< 若将式(1)和式(2)相减,且考虑到mjP-L1< 或写成 式(2)的两个方程相减可得 式中, α=IjL2/ IjL1=(fL1/ fL2)2 由式(4)知, 将式(5)代入式(3)可得 或写成 式(6)左边的第二项,是GPS载波相位测量的整周模糊度偏差距离之差。用我们自己的DDKIN-OTF动态载波相位测量数据处理软件多次解算的实践表明,一般用10个时元的载波相位测量数据,即可固定整周模糊度之解,以致式(6)左边的第二项可以忽略不计,故有 依式(6)的推导方法,可得 当略去式(8)左边的第二项时,则得 考虑到fL1=1575.42MHz和fL2=1227.60MHz,则知:α=1.646944;故有 对四种最新的GPS双频接收机半小时实际测量数据解算表明,MjL1-P的均值分别为0.135m~6.326m;MjL2-P的均值分别为0.178m~8.675m。这些数值能够较好地反映GPS双频接收机的性能优劣;一般而言,MjL1-P和MjL2-P的均值越小,其接收机的作业性能就越好,也越能获得较高而稳定的GPS卫星定位精度。这可供检测GNSS导航信号接收机的基本性能参考。 卫星信号在接收机内部从一个电路到另一个电路的行进中,必须占据一定的时间,这种由于电子电路所产生的时间延迟,叫做内部时延。它的大小可以根据电路参数计算求得。如果内时延是稳定而不变动的话,经过内时延改正后的站星距离,便不存在测量精度的损失。但是,由于波道时延的不稳定性,中频信号的相位抖动和接收天线的相位中心漂移,不可能实现接收机内时延的精确改正。为了监控内部时延的不稳定性,需要定期地检测GNSS导航信号接收机。 此外,现行的GNSS卫星导航定位,是基于被动式测距原理;GNSS导航信号接收机只要测得用户天线至GNSS卫星的距离(简称为站星距离),即可按式(11)解算出用户位置: 式中,Pj(t)为GNSS导航信号接收机测得的用户在时元t至第j颗GNSS卫星的距离;Xj(t),Yj(t),Zj(t)为第j颗GNSS卫星在时元t的在轨位置;Xu(t),Yu(t),Zu(t)为用户天线在时元t的在途位置;du(t)为GNSS导航信号接收机时钟偏差等因素引起的站星距离偏差。 从式(11)可见,为了解算出用户的三维位置,GNSS导航信号接收机至少要观测四颗GNSS卫星,而列出四个如上的方程式。由此可见,GNSS定位精度与用户航行速度快慢无关,只取决于下列三大因素: ⊙ 站星距离的测量误差。 ⊙ 作为动态已知点的GNSS卫星的实时在轨位置误差。 ⊙ 所测四颗以上GNSS卫星在空的几何分布,即PDOP值。 从此可见,适时地检测GNSS导航信号接收机的基本性能,是确保导航定位成果高精度的第一步;特别是对于新近购得或研制的接收机,更有必要。GNSS导航信号接收机的基本性能检测主要包括下列几项:一是内时延稳定性的检测;二是外部符合精度的测定;三是GNSS成果可靠性的鉴别。下面对接收机基本性能检验分别予以简要论述。� 零基线,源于用二台接收机作相对定位所测定的两付GNSS导航信号接收天线之间的距离和相对位置。所谓零基线,是二个接收单元共用一副天线单元而测定的距离;其值应为零。当作零基线检测时,仅用一副GNSS导航信号接收天线接收在视卫星信号,并通过一个信号分配器将所接到的GNSS导航信号分别送到各个接收单元(如图2所示),进而分别测定同一接收天线至各颗在视GNSS卫星的距离;对两个接收单元所观测的GNSS数据进行联合解算,可以求得零基线的长度和相对点位。零基线检测的优点是: ⊙ 能够消除GNSS导航信号接收天线相位中心漂移影响。 ⊙ 能够消除GNSS导航信号在大气传播的不良影响。 ⊙ 能够消除GNSS卫星的星历误差。 ⊙ 能够消除多路径效应的不良影响。 图2 零基线检测框图 也即,零基线测验的解算成果,消除了GNSS导航信号的传播误差、多路径误差、星历误差和天线相位中心不稳定性影响,仅仅取决于接收机内时延的大小及其不稳定性。因此,零基线测验成果与其真值(△X=△Y=△Z=0,D=0)相比较,可以鉴别内时延的相对值,多次检测成果可以鉴别内时延的稳定与否。 表3 Trimble 4000SSI的零基线检测成果 表3是我们于2001年4月和6月对3台Trimble 4000SSI双频接收机作零基线检测的实测成果。从表列数据可知,实际测定的零基线长度与其真值(0mm)之差小于0.095mm;相对位置与其真值(△X=△Y=△Z=0)之差也不超过±0.062mm。这说明Trimble 4000SSI具有较小的相对内时延。相隔50天后的零基线检测成果也很近似,这表明Trimble 4000SSI的内时延比较稳定;因此,用Trimble4000SSI作导航定位测量能够获得稳定可靠的实际精度。零基线检测,不仅可以对同一型号的GPS信号接收机配对检测,而且还可以用不同型号的GNSS导航信号接收机配对检测。表4下半部分成果,是将Trimble GPS信号接收天线改换为AOA GPS信号接收天线,且用三台3台Trimble 4000SSI双频接收单元,共用一副AOA GPS信号接收天线;其零基线检测成果表明,实际测定的零基线长度与其真值之差,以及相对位置与及其真值之差,均不超过0.1mm;这表明,它们具有较高的外部符合精度。 表4 混合配对的零基线测定成果 零基线检测,不仅可以对同一型号的GNSS导航信号接收机配对检测,而且还可以用不同型号的GNSS导航信号接收机配对检测(如表4所示)。从表列数据可见,Ashtech LM-XII3和Trimble 4000SSE混合配对,而用AOA SNR-8000接收机的天线作零基线检测,用载波L1测得的零基线长度为0.4mm;用载波L2测得的零基线长度为1.0mm。当改用AshtechLM-XII3接收机的天线(用圆括号表示),而保持接收机的配对不变,用载波L1测得的零基线长度仍为0.4mm,用载波L2测得的零基线长度则为1.3mm。表4中三种接收机的零基线检测表明,它们的相对内时延是比较小的。� 超短基线检测法,是笔者于1991年初春提出的,并经过了多次生产实践应用;其目的是便于某些野外作业者,在GNSS测量现场,进行GNSS导航信号接收机的基本性能检测。从目前GNSS导航信号接收机的发展可见,GNSS天线单元与接收单元结合为一体的GNSS导航信号接收机已经成为一个重要的发展机型,笔者称之为“一体机”。下文所述的超短基线检测法,适应于检测GNSS导航信号接收机的“一体机”。超短基线检测的基本思想如下述: (1)在一个植被优良和地势开阔的检测场地上,依据被检测的GNSS导航信号接收机的台数,测设一个边长为几米的几何图形(如三角形或四边形),并用钢卷尺精确地测定它们的实际长度,以此作为检测的标准值。� (2)将受检GNSS导航信号接收机安设在检测图形的各个节点上,进而作多个时段的定位测量。图3表示我们于2001年4月用超短基线构成的三角形检测三台接收机之例;该检测三角形的平均边长为8.036m。在第一时段,图3中的A,B,C三个测站上分别安设8668,8511,8697号Trimble 4000SSI GPS信号接收机;后续时段,则按照全组合方式,以反时针方向移动方式,安设三台GPS信号接收机(如表5所示)。 图3 检验三角形 表5 各测站的4000SSI接收机安设顺序(于2001年4月16日) (3)处理和分析各接收机对的双差定位成果(如表6所示)。在几米长的超短基线上作双差定位测量时,既可不顾及对流层和电离层时延改正的残差影响,又可消除星历误差和星钟误差,以及两台接收机的收钟误差。各站际双差成果和基线标准值D0之差,便能较客观地反映各接收机对的仪器误差及其稳定性。从表6数据可见,用三台Trimble 4000SSI GPS信号接收机所测得的超短基线距离与其标准值之差,最大相差为4mm,最小相差仅为1mm。这说明,受检的三台4000SSI双频接收机,既不存在明显的仪器误差之异,又在相对定位时具有较小的仪器误差。但是,在作业过程中,应该按照检测时所用的接收机和外接天线配对,而不宜重新组合GNSS导航信号接收天线和接收单元的配对。 为了真实地反映GNSS导航信号接收机的基本性能,在作超短基线检测时,应充分注意下列几点: ⊙ 各时段的持续时间应该相同(一般采用60分钟)。 ⊙ 各时段的三维位置几何精度因子(PDOP)的选择,均应小而相近似,致使各个PDOP对各接收机对的检测成果具有相近似的影响。 表6 Trimble 4000SSI超短基线检测三角形的检测成果 ⊙ 宜选取较大的卫星高度截止角(如20°),以保持检测过程中具有相近似的信噪比,并记录后者,以备分析之用。 实际上,四台接收机的超短基线检测,还可以采用如图4所示的检测四边形;其各边长度也应设定在几米,且应精确测定它们的实际长度,用作标准值。当作第一组检测时,四台接收机(R1,R2,R3,R4)分别安设在四个测站(A,B,C,B,见表7所示)上。当作第二组检测时,四台接收机依顺时针变换测站安设[如表7的R4(A),R1(B),R2(C),R3(D)];余类推。采用四边形检测,可以计算出同步环路和异步环路的坐标闭合差,及时评定GNSS数据质量的优劣,客观地检测GNSS导航信号接收机的基本性能。 图4 检测四边形 表7 在四边形上的组合检测 GNSS导航信号在接收机内部电路所产生的时间延迟是不稳定的,难以予以精确改正,因此,为了监控内部时延的不稳定性,需要定期地检测GNSS导航信号接收机。依靠已知基线或已知边长的几何图形,能够检测GNSS导航信号接收机的外部符合精度;依据多时段观测成果的互差,能够鉴别GNSS成果的可靠性。零基线检测法,是测定接收机内时延大小及其稳定性的有效途径。超短基线检测法,是在零基线检测的基础上发展而成的;对于GNSS天线单元与接收单元结合为一体的GNSS导航信号接收机,或者,在某些野外作业的条件下,一时难以制配信号分配器,就可改用超短基线检测法;实践证明,它具有零基线检测法的同等作用。 图5 用三星Galaxy Note 手机的GPS定位成果 值得一提的是,带GPS导航定位功能的手机的基本性能检测问题有待实用解决。据笔者所知,具有GPS导航定位功能的三星Galaxy Note手机,是一种真正能够独立自主做GPS导航定位的手机,很受用户赞赏。例如,2013年2月11日,胡克伟硕士利用该手机在武汉市公交车上测得如图5所示的GPS动态定位成果(手机显示界面的截获图);由此可见,两次测量仅相差40秒钟,而它显示的定位精度却相差6m。因此,如何确认它的真实精度,就需要对它予以实际检测。对于这种GPS信号接收天线与跟踪测量一体化的设备,检测它们的测量精度等项技术参数,虽然不能够采用零基线检测法,但是,能够采用笔者提出的已知点位检测法。 见www.dcw.org.cn









三、检测GNSS接收机基本性能的方法

1. 零基线检测法


2. 超短基线检测法



四、结束语
 猜你喜欢
高技术通讯(2021年3期)2021-06-09 06:57:46科学(2020年5期)2020-11-26 08:19:14测控技术(2018年6期)2018-11-25 09:50:18电子制作(2018年19期)2018-11-14 02:36:40舰船电子对抗(2016年5期)2016-12-13 08:41:14电子制作(2016年1期)2016-11-07 08:42:41系统工程与电子技术(2016年4期)2016-08-24 07:46:04西部广播电视(2015年10期)2016-01-18 04:01:45电测与仪表(2014年15期)2014-04-04 12:05:32航天器工程(2014年5期)2014-03-11 16:35:50
猜你喜欢
高技术通讯(2021年3期)2021-06-09 06:57:46科学(2020年5期)2020-11-26 08:19:14测控技术(2018年6期)2018-11-25 09:50:18电子制作(2018年19期)2018-11-14 02:36:40舰船电子对抗(2016年5期)2016-12-13 08:41:14电子制作(2016年1期)2016-11-07 08:42:41系统工程与电子技术(2016年4期)2016-08-24 07:46:04西部广播电视(2015年10期)2016-01-18 04:01:45电测与仪表(2014年15期)2014-04-04 12:05:32航天器工程(2014年5期)2014-03-11 16:35:50