基于STC 单片机的仿生六足机器人设计*
2013-12-22 06:05:24吴宏岐郭梦宇
电子器件 2013年1期
吴宏岐 ,郭梦宇
(宝鸡文理学院电子电气工程系,陕西 宝鸡721007)
在自然界和人类社会中存在一些可能危及人类生命的特殊场合。灾难发生矿井、防灾救援和反恐斗争等,对这些危险环境进行不断地探索和研究,寻求一条解决问题的可行途径成为科学技术发展和人类社会进步的需要。地形不规则和崎岖不平是这些环境的共同特点。从而使轮式机器人和履带式机器人的应用受到限制。与轮式、履带式移动机器人相比,多足步行机器人的腿部具有多个自由度,使其运动的灵活性大大增强。它可以通过调节腿的长度保持身体水平也可以通过调节腿的伸展程度调整重心的位置因此不易翻倒[4]。在这种背景下多足步行机器人的研究非常重要,而仿生步行机器人的出现更加显示出步行机器人的优势。
1 六足机器人仿生原理及总体设计方案
1.1 步态仿生原理
六足步行机器人的步态是多样的,其中三角步态是六足步行机器人实现步行的典型步态[6]。“六足纲”昆虫步行时,一般不是六足同时直线前进,而是将三对足分成两组,以三角形支架结构交替前行。目前,大部分六足机器人采用了仿昆虫的结构,6 条腿分布在身体的两侧,身体左侧的前、后足及右侧的中足为一组,右侧的前、后足和左侧的中足为另一组,分别组成两个三角形支架,依靠大腿前后划动实现支撑和摆动过程,这就是典型的三角步态行走法,如图1 所示。

图1 三角步态
图1中机器人的髋关节在水平和垂直方向上运动。此时,B、D、F 脚为摆动脚,A、C、E 脚原地不动,只是支撑身体向前。由于身体重心低,容易稳定,所以这种行走方案能得到广泛运用。
1.2 总体设计方案
1.2.1 主要部件——舵机
本设计采用YZW-Y09G 型舵机图2 所示,作为六足机器人关节件,该舵机具有重量小、扭力大和定位精确的特点,适用于机器人的制作[5]。舵机主要用作运动方向的控制组件,它有着高力矩、高性能、低价格等优点。当它接收到一个位置指令,它就会运动到制定的位置。因此,许多小型机器人也常用到它来驱动运动的关节。

图2 舵机图解
一个舵机内部包括了一个小型直流马达;一组变速齿轮组;一个可调电位计及一块电子控制板[7]。其中,高转速的直流马达提供了原始动力,带动减速齿轮组,使之产生高扭力的输出。一个舵机是一个典型闭回路控制系统,其原理可由图3 所示。
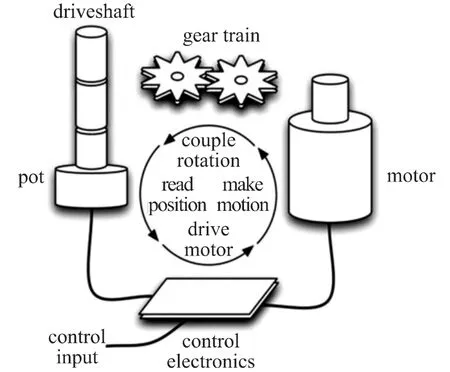
图3 舵机控制系统简图
减速齿轮组由马达驱动,其输出端带动一个线性的比例电位器作位置检测,该电位器把转角坐标转换为一比例电压回授给控制线路板,控制线路板将其与输入的控制脉冲信号比较,产生修正脉冲,并驱动马达正向或反向地转动,是齿轮组的输出位置与设定值相符,令修正脉冲趋近于0,从而达到使马达精确定位的目的。
舵机有一个三线的接口,分别接电源线、地线及控制线。电源线和地线用于提供舵机内部的直流电机和控制线路所需的能源.电压通常介于4 V ~6 V,一般取5 V。控制线的输入是一个宽度可调的周期性方波脉冲信号,方波脉冲信号的周期为20 ms。如图4 所示,当方波的脉冲宽度改变时,舵机转轴的角度发生改变,角度变化与脉冲宽度的变化成正比。
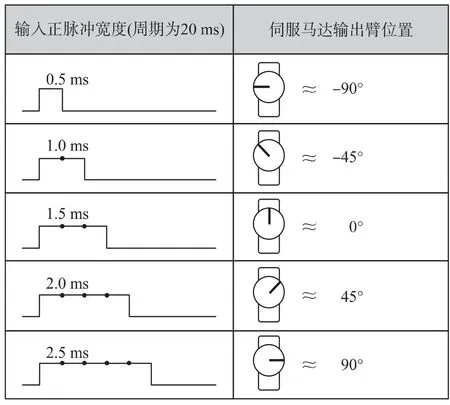
图4 舵机输出转角与脉冲宽度的关系
1.2.2 动力选择
六足机器人采用了18 个舵机作为关节件,通过之前对舵机的介绍我们知道舵机是由直流电机,减速齿轮组,电位器与相应控制电板组成,舵机里的主要耗电部分就是直流电机。YZW-Y09G 型舵机里的直流电机耗电量相对标准舵机里的要小,但18 个舵机加起来仍然是很大的。YZW-Y09G 型舵机里的电机静载电流应该在100 mA 至150 mA,而负载时电流会增大到500 mA 至600 mA 之间。这样18 个舵机的电流需求范围大概就是2 A 至10 A 左右[8]。
考虑到实际应用,采用电池供电。电池种类有很多,干电池,铅蓄电池,锂电池等等。干电池的放电电流小,可以供电一两个舵机,但多了就不行了。铅蓄电池可以提供大电流放电,但体积比较大,不适合小型机器人携带。本设计采用7.4 V 锂聚合物电池供电,此电池能够大电流输出[9],并且体积小,便于安放在机器人上。供电时,通过D25XB80 整流桥降压到6 V 左右,为18 个舵机供电。
1.2.3 材料选择
制作机器人中,选用PVC 作为肢体材料,PVC主要成分是聚氯乙烯,又叫聚氯乙烯树脂,PVC 材料在实际使用中经常加入稳定剂、润滑剂、辅助加工剂、色料、抗冲击剂及其它添加剂。具有不易燃性、高强度、耐气侯变化性以及优良的几何稳定性。加工时采取手工加工的方式,在实验室就可进行,方便快捷,六足机器人样机如图5 所示。

图5 六足机器人样机图片
2 系统硬件设计
2.1 主框图
本设计以单片机为核心,在计算机上完成步行程序后,通过串口模块写入单片机,单片机与舵机控制板进行通信,控制舵机运动,主框图如图6 所示。

图6 设计方框图
2.2 单片机最小系统
如图7 所示,采用STC12C5A60S2 型单片机,由宏晶科技生产的单时钟/机器周期(1T)的单片机,是高速/低功耗/超强抗干扰的新一代8051 单片机,指令代码完全兼容传统8051,但速度快8 倍~12 倍。内部集成MAX810 专用复位电路,2 路PWM,8 路高速10 bit A/D 转换,针对电机控制,强干扰场合[3]。
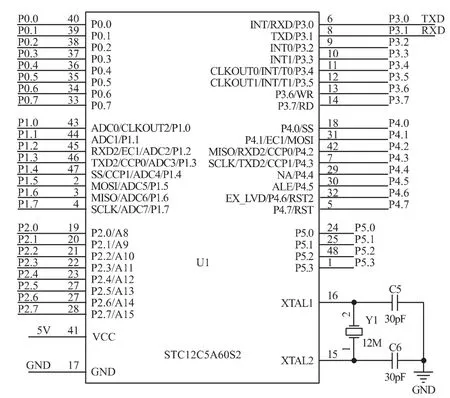
图7 最小系统原理图
2.3 电源转换电路
由于单片机所使用电压为5 V,需要将锂电池电源进行降压。图8 为降压稳压电路:输入端接电源正极,经过如图所示的AMS1117-5.0 芯片降压成5 V 后,供应给单片机。
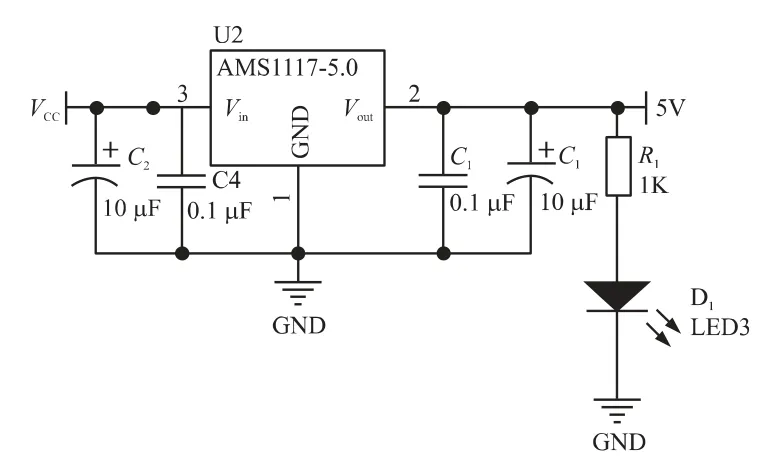
图8 降压稳压电路原理图
2.4 舵机控制板
采用AET168P1 舵机控制板,如图9 所示,从硬件上来看其实也就是一块单片机开发板,一片单片机加上一些外围电路。由于将多路舵机控制程序写入到单片机中,这个外表上看似普通的单片机开发板便有了不一样的价值。舵机控制板还有个方便之处在于有一套与之相对应的PC 调试软件,面向用户界面,使用户能够更直观的操控舵机位移,而且还能把调整出来的动作保存下来,形成连贯的动作组。
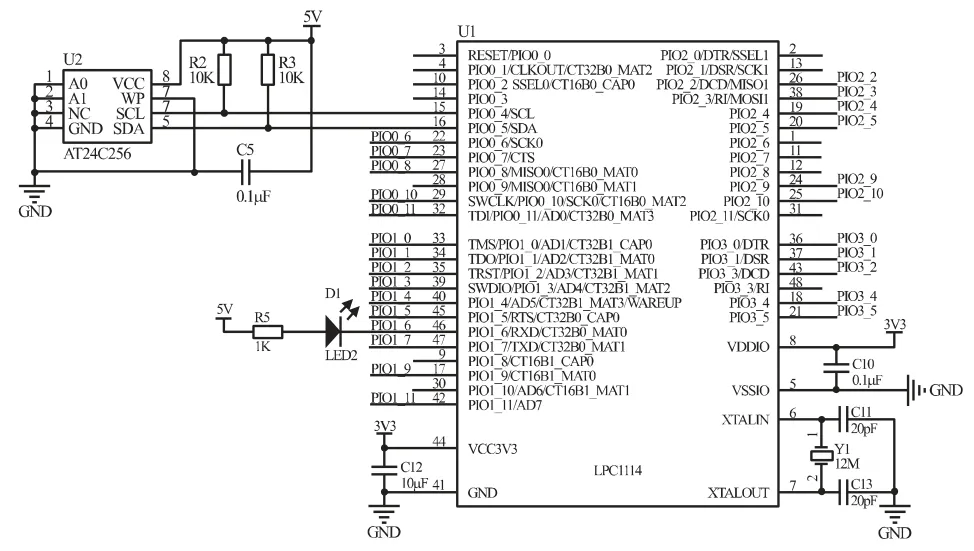
图9 舵机控制板原理图
主芯片为LPC1114,其核心是Cortex-M0 处理器,是市场上现有的最小、能耗最低、最节能的ARM处理器。输入电压为5 V,降压电路如图7 所示。另外,为扩大数据存储量,连接一个AT24C256 型存储器,容量256 kbyte,便于进行调试与运行。
3 系统软件设计
3.1 舵机移动指令
指令格式:#(舵机号)P(脉冲宽度)………#(舵机号)P(脉冲宽度)T(移动时间)
舵机号:1 ~24
脉冲宽度:500 μs ~2 500 μs,对应角度0°~180°
移动时间:从现在位置移动到指定位置所需的时间,单位ms,时间越短舵机反应越快,但过快舵机则反应不过来,一般在定在100 ms 以上[10]。
:回车符,指令结束符
3.2 调试与运行过程
调试过程不需要单片机参与,在计算机中装入舵机控制板的上位机软件,通过USB 转TTL 模块,进行计算机与舵机控制板的直接通信。
编写单片机程序使用Keil uVision2 软件,它是现今的主流编译软件,本身小巧并且功能强大。烧录时使用STC-ISP 软件,将编译生成的代码写入单片机即可。实际运行时,将舵机移动指令以字符串的形势编写入程序中,由单片机发送至舵机控制板从而控制各个舵机移动。
4 结束语
本次设计叙述了六足机器人的基本原理及制作方法,给出了一种六足机器人的设计方案。利用单片机程序设计原理,来实现六足机器人的各项功能。调试后,六足机器人可按要求工作,能够在不平的路面上稳定行走,未出现陷入松软地面及侧翻问题。加装上红外遥控装置后,它可广应用于探测、运输、救援等各个领域。
[1] 李建忠.单片机原理及应用[M]. 西安:西安电子科技大学出版社,2008.
[2] 江晓安,董秀峰.模拟电子技术[M].西安:西安电子科技大学出版社,2008.
[3] 赵保经.中国集成电路大全—CMOS 集成电路[M]. 国防工业出版社,2004.
[4] 刘敬彪,黄国晖,盛庆华.基于C8051F 的深海投放装置导航电机控制系统研制[J].电子器件,2009,32(6):1098-1101.
[5] 张立勋,孙卓君,董九志. 基于ATmega128 和FPGA 的六自由度机器人的直流伺服控制器设计[J].电子器件,2007,30(5):1852-1855.
[6] 刘伟庭,方向生,陈裕泉.仿生“蚯蚓”机器人的SMA 执行器实现[J].传感技术学报,2005,18(3):623-626.
[7] 肖斌,贾剑平.机器人控制系统关键模块的电路设计[J].电子世界,2012(6):82-83.
[8] 章安福,沈文华.亚太大学生机器人大赛中机器人移动方式的探讨[J].机器人技术与应用,2010(5):35-39.
[9] 王楠,宋爱国,刘佳.一种新颖的柔性触觉再现装置[J]. 传感技术学报,2010,23(3):331-335.
[10] 车玲玲,王志良.ZMP 理论在双足步行机器人步态控制中的应用[J].电子器件,2007,30(4):1462-1464.
猜你喜欢
科学大众(2024年5期)2024-03-06 09:40:34
日用电器(2023年7期)2023-09-07 00:41:56
橡塑技术与装备(2021年5期)2021-03-16 06:43:48
自动化学报(2019年6期)2019-07-23 01:18:36
电子制作(2019年23期)2019-02-23 13:21:22
电子制作(2018年18期)2018-11-14 01:48:04
自动化学报(2018年6期)2018-07-23 02:55:42
电子制作(2018年1期)2018-04-04 01:48:14
制造业自动化(2017年2期)2017-03-20 14:26:08
火控雷达技术(2016年2期)2016-02-06 02:28:54