
基于虚拟仪器的远程可视化液位过程控制系统研究
2013-12-20 08:24房泽平刘自范
中原工学院学报 2013年1期
房泽平,刘自范
(中原工学院,郑州450007)
近年来将虚拟仪器技术应用于过程控制领域的方法受到越来越多的重视.目前,国内外关于将虚拟仪器技术应用于过程控制系统的研究比较少.远程控制已成为当今自动化领域的一项关键技术,越来越受到重视.基于Internet的远程控制技术的研究,不仅充分利用了资源,拓宽了Internet的使用范围,而且能够减少控制系统运行成本,扩大远程化距离,实现任意节点的访问机制[1].在远程控制系统中,实时图像传输是远程控制系统的一个重要的反馈环节,其作用类似于工作人员的眼睛,工作人员借助实时图像通过图像化的方式来监视过程控制系统的运行.为此,本研究以PCT-I型实验装置为硬件平台,设计实现了一种基于虚拟仪器的远程可视化液位过程控制系统.
1 系统组成原理
远程可视化液位过程控制系统组成结构如图1所示.该系统由过程对象单容水箱、PCI-6014、V/I变换、摄像头、变送器、执行器和计算机等组成.过程对象单容水箱的液位值经变送器和I/V变换后,连接到PCI-6014板卡的输入端子.计算机(LabVIEW)通过PCI总线采集PCI-6014输入端子的液位数值,并由Lab-VIEW作进一步处理.根据控制液位的要求,计算机(LabVIEW)发出的控制液位命令经由PCI-6014去控制电动调节阀,进而调节进入水箱的水流量,再配以PID控制算法,实时改变水箱的液位,便可以完成对水箱液位的监控和自动控制.摄像头实时采集的水箱图像,通过USB接口传输到LabVIEW软件后,由Lab-VIEW的图像处理程序进行处理和显示,完成对过程的实时图像监控.利用LabVIEW的Remote panels技术,通过Internet实现对过程控制系统的远程可视化监控.
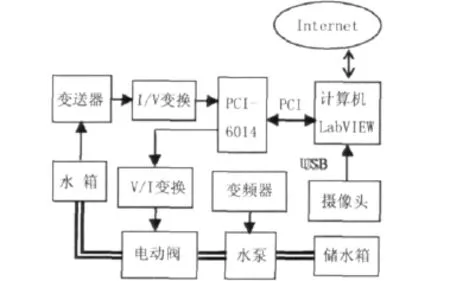
图1 远程可视化过程控制系统的组成结构图
2 液位采集与PID控制
2.1 液位采集
2.1.1 I/V变换
液位测量电路如图2所示.变送器(上海仪华测控仪表有限公司生产的DBYG-5000/ST502型扩散硅压力变送器,精度为0.5级,二线制4~20mA标准信号输出)在工作时需串连24V的直流电源,经由电阻R(取样电阻,阻值为250Ω)完成I/V变换,将变送器输出的4~20mA的电流信号转换为1~5V的电压信号,再采用差分输入方式将其接至PCI-6014板卡的输入端子,由PCI-6014板卡进行A/D转换,得到对应液位值的电压信号.

图2 液位测量电路
2.1.2 液位数据采集程序
液位数据采集是将液位信号转化为数字量并传递到计算机的程序,如图3所示,该程序可以完成A/D转换,将模拟量自动转换为数字量提供给计算机.该程序可以对指定通道的信号进行采集,并返回测量的电压值,使用时需要设定输入设备号(0)、输入通道号(0)、采样周期、采样点数和输入信号(+10V)等参数.该程序的数据采集功能由信号采集函数Functions→Data Acquisition→Analog Input→AI Acquire Waveform.VI(图3中的AI模块)来实现.由于AI输出的是对应液位的电压值,即显示液位值,因此,需要进行PCI-6014板卡电压(0~10V)→I/V电压(1~5V)→变送器电流(4~20mA)→液位(0~450mm)过程的转换,如图5所示.由于后续的PID控制器以电流运算,所以应将对应液位电压值转换为电流值.
2.2 基于LabVIEW的PID控制
PID控制算法是当前工业控制中应用最广泛的算法之一.它的优点是原理简单,易于实现,稳态性能好.在数字PID中,有位置型PID和增量型PID两种方式.因本系统PID控制器的输出直接控制电动调节阀,因此采用位置型PID方式.

图3 液位采集程序
2.2.1 增量型PID算法原理
增量型PID算法具有编程简单、占用存储单元少、运算速度快等优点.所以,本系统利用增量型PID来实现位置型PID.位置型PID表达式为

式中,u(k)和Δu(k)分别为采样时刻k的位置型PID输出值和增量型PID输出值;u(k-1)为采样时刻k-1的位置型PID输出值.其中,增量型PID表达式为

式中:e(k)、e(k-1)、e(k-2)分别为采样时刻k、k-1、k-2的偏差值;采样周期T为1s;KP、KI、KD分别为比例系数、积分系数和微分系数;等式右边的3个部分分别为比例作用、积分作用和微分作用.
2.2.2 基于LabVIEW的位置型PID的实现
由式(1)和式(2)可知,利用LabVIEW 进行位置型PID的设计主要包括:偏差、比例作用、积分作用、微分作用和增量型PID输出值及位置型PID输出值计算.增量型PID输出值为比例作用、积分作用和微分作用三者之和.通过式(1)可计算得到位置型PID的输出值,如图4所示.图4中,e(k-1)和e(k-2)是由e(k)传递得到;u(k-1)是由u(k)传递得到[2-3].
2.2.3 标度变换
在图1中,水箱的液位测量范围是0~450mm.液位变送器的输出电流为DC4~20mA.PCI-6014的输入和输出均为DC0~10V.PID控制器以电流为单位运算.为方便运算和编程,将系统中的物理量单位均转换为电流,因此,需要进行标度变换,如图5所示.
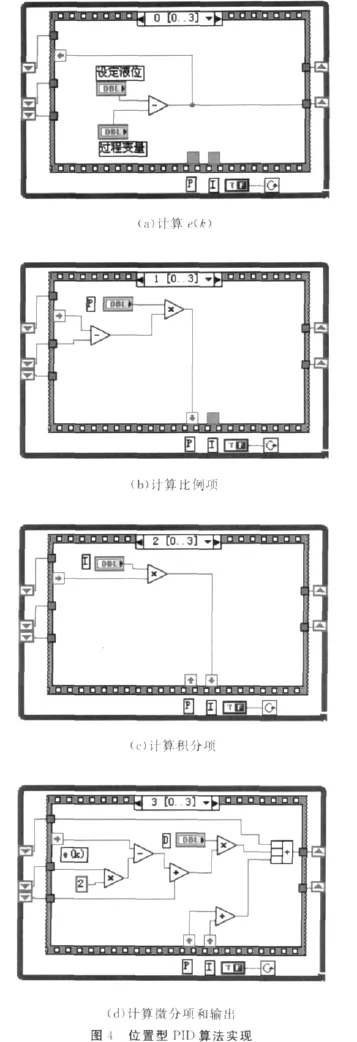
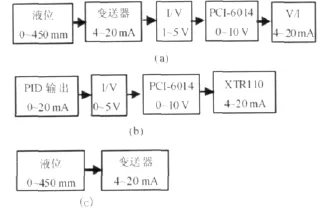
图5 标度变换
在图5中,液位到电流的变换,如图5(a)所示;PID控制器输出的电流到电流的变换,如图5(b)所示;液位设定值的液位到电流的变换,如图5(c)所示.图5中的标度变换,在LabVIEW中通过编写程序给予实现.
3 远程可视化处理
3.1 基于USB接口摄像头的图像可视化处理
采用基于USB接口的摄像头进行现场图像采集,图像的大小可设置为高480像素、宽640像素.图像采集程序利用LabVIEW用户开发的免费工具包——LabVIEW Webcam Library(源代码开放的、免费的图像采集与处理软件包).LabVIEW Webcam Library Vis按功能可分为2类:①Capture Vis,完成图像采集的一些基本操作,如:Webcam Initialize、Webcam Grab.vi、Webcam picture.vi、Webcam Close.vi等;②Conversion Vis,主要完成一些图像变换,如Webcam Flat to IMAQ.vi、Webcam IMAQ to Flat.vi、Webcam Flat to Picture.vi、Webcam Get Color Table.vi等[4-5].
摄像头采集图像程序,如图6所示,该程序包括:初始化图像采集设备,图像采集,图像信号转换为可显示、可存储的数据格式,图像显示和关闭图像采集设备.Camera?为指示摄像头是否初始化成功.
3.2 基于Internet的远程传输
利用LabVIEW的Remote panels技术[6],用户可以看到过程控制系统的现场情况,如图7所示.此时,用户就如同身临现场一样观察过程控制系统的运行,利用廉价的设备和简单的编程就能实现以往需要较大投资和较复杂的编程才能实现的功能,有效地节约了人力和财力资源.

图6 摄像头采集图像程序
4 结 语
利用该系统对单容水箱液位进行测量和监控.利用USB接口摄像头采集现场实时图像,并通过Internet进行远程传输,实现过程控制系统的远程可视化监控.
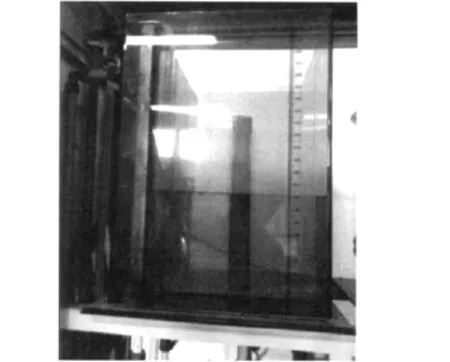
图7 单容水箱的现场图像
采用PID控制算法进行液位控制,经过实际现场测试,完全满足了液位控制要求.该系统在传统方法(只传输监控软件所做的画面)的基础上,将摄像头采集的现场图像进行实时远程传输,不仅可以通过软件设计的画面监控过程控制系统,而且可以用现场图像进行实时监控,保证系统的安全可靠运行.
[1]AI Xin,YANG Si-han,ZHOU Xiao-xin.Virtual Instrument Technology and Its Application to Power System[J].IEEE Transactions on Instrumentation and Measurement,2001,25(15):54-57.
[2]李敏,张维维,王淼石.基于USB数据通信的液位测控系统[J].仪表技术与传感器,2010(2):48-50.
[3]刘其和,李云明.LabVIEW虚拟仪器程序设计与应用[M].北京:化学工业出版社,2011.
[4]翟艳磊,陈磊,何祥宇.基于LabVIEW 的远程家庭监控系统设计[J].电子测试,2010(6):37-40.
[5]赵云丽,黄乡生.基于LabVIEW 的烤烟房远程温湿度测控系统[J].电子元器件应用,2009,11(4):40-43.
[6]唐鸿儒,刘大年,杨鹏等.基于Internet的远程监控系统开发技术研究[J].测控技术,2003,22(4):48-51.
猜你喜欢
石油工业技术监督(2022年7期)2022-08-18
河北农机(2020年10期)2020-01-08
电子制作(2018年12期)2018-08-01
电子制作(2017年19期)2017-02-02
人民交通(2015年4期)2015-12-17
小雪花·成长指南(2015年10期)2015-10-23
汽车维护与修理(2015年2期)2015-02-28
自动化博览(2014年12期)2014-02-28
自动化博览(2014年12期)2014-02-28
科技传播(2012年10期)2012-06-06
