
基于单片机的定日镜阵列聚焦控制系统设计
2013-12-14 09:03:28熊田忠黄捷孙承志陈海霞
机床与液压 2013年10期
熊田忠,黄捷,孙承志,陈海霞
( 三江学院电气与自动化工程学院,江苏南京210012)
塔式太阳能热发电系统也称集中型太阳能热发电系统。如图1 所示,塔式太阳能热发电系统的基本形式是利用独立跟踪太阳的定日镜群,将阳光聚集到固定在塔顶部的接收器上,用以产生高温,加热工质产生过热蒸汽或高温气体,驱动汽轮机发电机组或燃气轮机发电机组发电,从而将太阳能转换为电能。
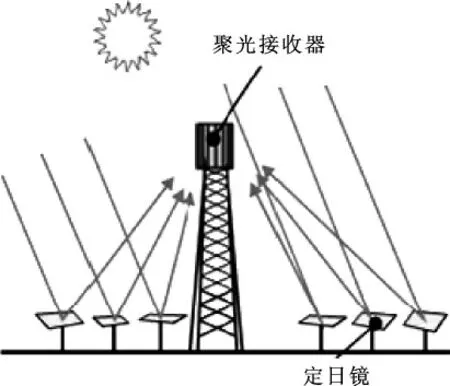
图1 塔式太阳能热发电系统示意图
塔式太阳能热发电站的优点:聚光倍数高,容易达到较高的工作温度,阵列中的定日镜数目越多,其聚光比越大,接收器的集热温度也就愈高;能量集中过程是靠反射光线一次完成的,方法简捷有效;接收器散热面积相对较小,因而可得到较高的光热转换效率;多种工质,储热方案多样性;分布式系统,科技进步。塔式太阳能热发电站的缺点:定日镜控制难度大;镜场系统投资大。
某塔式太阳能热发电系统要求:供电电压18 ~30 V DC;电机动态功耗低于60 W,电机不运转时,切断电机电源;步进电机启动及停止平稳无振动;电机转动最大速度300 r/min;水平方向(方位角)轴转动范围0° ~360°,垂直方向(高度角)轴转动范围0°~85°;机械定位精度0.4×10-3rad (0.022 92°),镜子输出最小转动0.1×10-3rad (0.005 73°);系统一个模组3.6 万个节点;成本低廉。
RS485 总线和Modbus 协议广泛地应用于工业控制领域[1-2]。作者采用简单实用的RS485 接口、ModbusRTU 协议,组成2 层总线网络,实现多节点运动控制系统的群控;同时,每个节点实现按当前日期时间、相对塔距、相对塔方位、塔高、所处经纬度等自动调节镜面方位角与俯仰角,实现塔式太阳能发热系统对阳光的聚焦。
1 方案设计
对于每个节点,机械系统方案采用:0° ~85°转动部分用步进电机直联高精度涡轮蜗杆;0° ~360°转动部分也用步进电机直联高精度涡轮蜗杆;机械设计上保证了自锁性,电机不运转时可以切断电源。机械方案简图如图2 所示。镜片距离发射光接收部分最远距离以300 m 计,机械定位精度0.4 ×10-3rad 时,镜片输出误差在反射耀斑中心误差为240 mm (镜片转动一个微小角度α,反射光的偏转角度为2α,当α为0.4 × 10-3rad 时,耀斑偏转2 × 0.4 × 0.001 ×300 ×1 000 =240 mm),则机械结构设计上要考虑精度与刚性。
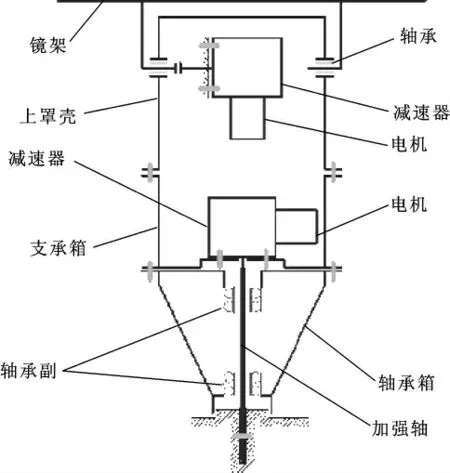
图2 节点机械结构示意图
控制系统采用单片机为控制器,RS485 接口的Modbus 通信方式进行群控。36 000 节点采用单片机直接控制2 台步进电机,只作Modbus 从站,需要1个UART。每个节点有唯一“组号(1 ~150) +组内号(1 ~240)”的标号。节点在空间上按一定规律排列,组内240 个节点聚集在一起。150 只按组号作Modbus 中转,每个Modbus 中转挂240 个节点,也采用单片机,需要2 个UART。总线结构如图3 所示。
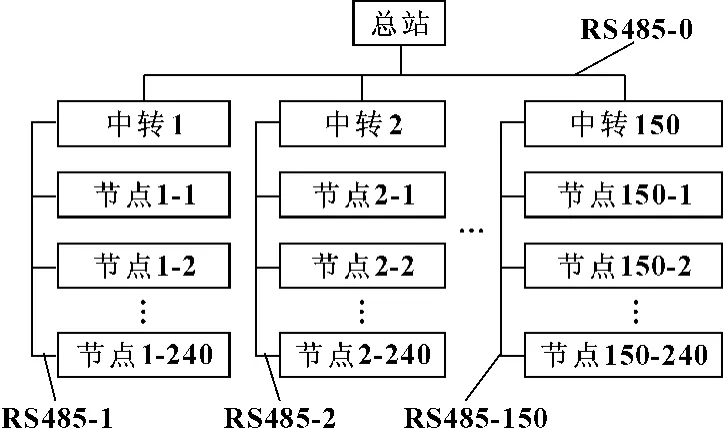
图3 Modbus 总线分层结构
选择步进电机步距角:0.9°,传动比:180,则每发1 个脉冲镜片转0.005°,符合镜片输出最小角度要求。根据高度角电机x 向转动范围:0° ~85°,最大脉冲总数17 000 (采用2 字节,16 位无符号整数)。根据方位角电机y 向转动范围:0° ~360°,最大脉冲总数72 000 (可采用4 字节存储,长整数)。
由于每秒钟太阳偏转约0.004 2° (360/ (24 ×3 600)),根据机械允许定位精度,若取控制允许角度偏差为1' = 0.016 7°,则最长约4 s (0.016 7°/0.004 2°)需要更新调整角度。步进电机处于极低速运转状态,几乎就是单步运行,机械设计和电气控制上要注意避免低频振荡现象,发完脉冲后可以断电进行机械自锁,防止丢步和滑步。
以下方案计算中,通信速率按9 600 b/s,按每个字节实际发送11 位,每个Modbus 报文长度为有效数据字节加上9 个字节,组内号用“#”表示,每个小方格表示1 字节数据。
方案一:全部总站高性能计算机进行运算,根据当前日期时间、所处经纬度、各节点相对塔方位角、塔高和各节点至塔垂直距离计算出每个节点当前时间x、y 向电机理论转角所应发脉冲,逐一发到每个节点,每个节点根据已转角度脉冲与之比较,从而调整镜片姿态。
采用组轮写方式。向每个节点发送数据量见表1,共7 个字节。每组发数据长度(9 +7 ×240) =1 689 B,1 689 ×11/9 600≈1.94 s,若采用3 s 轮流发送,150 组需时7.5 min,显然该方案不可取。

表1 方案一组轮写方式每节点有效数据格式
采用组广播写方式。每个节点数据需增加组号,格式见表2 所示。每次写全部数据长度约8 ×150 ×240 =288 000 B,数据太多,需要大内存单片机,成本高;而且每发送完一次数据需时约288 000 ×11/9 600≈330 s=5.5 min,显然也不能采用。

表2 方案一组广播每节点有效数据
方案二:只做时间同步和特殊控制,特殊控制采用1 个字节表示,比如可以根据某位来控制所有节点进入风沙保护模式、回零点模式等。#S 和#E 用来控制组内节点不工作镜片序号范围,不工作镜片数量可以根据实际塔温等来动态闭环控制。总站与中转站均采用广播方式,每次发送有效数据格式见表3。而每个节点单片机需要设定所处经纬度、节点相对塔方位角、塔高和节点至塔垂直距离,可以在调试时通过Modbus 发送或者通过现场设定存储于掉电能保持的存储器中,比如EEPROM 中;也可以在程序中修改,然后下载至单片机程序存储器。每个节点单片机根据当前日期时间、所处经纬度、节点相对塔方位角、塔高和节点至塔垂直距离等,通过一定运算,计算出当前时间x、y 向电机应发脉冲数,与已发脉冲比较,然后调整步进电机姿态,从而实时控制镜片。该方案节点单片机需要有较强的数据处理能力,每个节点是一个太阳光自动跟踪装置[3]。

表3 方案二数据格式
该方案采用广播方式,每次发送数据长度5 +8 =13 B,每次耗时约15 ×13/9 600≈0.02 s,可考虑0.5 s 广播一次,总站、中转Modbus 相同,时间误差小于1 s。
2 实施要点
按照方案二,实施要点主要有两个:其一为节点单片机对该节点镜面角度的控制,其二为两层基于RS485 的Modbus 主从站软件设计,后者主要是Modbus 协议的CRC 校验程序的编写。
可以选择PIC24F16KA101 单片机作中转和节点控制器,该单片机为16 位架构,16 kB 的Flash 程序存储器,512 字节EEPROM,2 个UART 接口,1 个9通道10 位A/D 转换,3 个16 位定时器,CPU 主频最高达32 MHz,指令速度达16 MIPS,符合此例要求。为了计算的精度考虑,方位角、至塔距离、塔高、经度、纬度等可采用双精度浮点数。太阳高度角和方位角计算公式[4-5]如下:

式中:h 为太阳高度角,地球上某点的切平面与某时刻此点和太阳连线的夹角;A 为太阳方位角,太阳直射光线在地平面上的投影线与当地地平面子午线正南向所夹的角,通常以南点S 为0°,向西为正值,向东为负值;φ 为当地的地理纬度;δ 为太阳赤纬角,是太阳光线与地球赤道的夹角,以北为正,一年内,太阳赤纬角在±23.271°之间变动。要确定某一天的太阳赤纬角,可以利用下面的公式 δ =23.45sin((284 + DAY)×360°/365)来进行近似的计算,其中DAY 为一年中从1 月1 日起到该天的天数;Ω 为太阳时角,地球一天24 h 自转360°,每小时的自转角为15°,规定当地正午12:00 时的时角0°,上午为负,下午为正。例如,上午10 时Ω = -30°,下午3 时Ω=45°,当地时间可以用当地所处经度对当地时区标准时间进行修正。
镜面法向高度角和方位角可按图4 计算,从而可以确定每时刻x、y 向步进电机的理论转角。
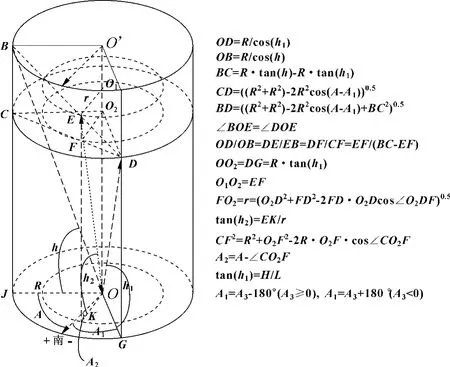
图4 镜面法向高度角和方位角的计算
图中:H 为塔高;L 为节点至塔垂直距离;A3为节点相对于塔方位角;h1为镜面理论反射高度角;A1为镜面理论反射方位角;h2为镜面法向高度角;A2为镜面法向方位角。
选取步进电机及配套驱动器,采取脉冲加方向控制,程序控制时表示步进电机当前位置脉冲为找零点后所发脉冲的累加,反方向为负号。节点控制器对x、y 向电机的控制程序略。
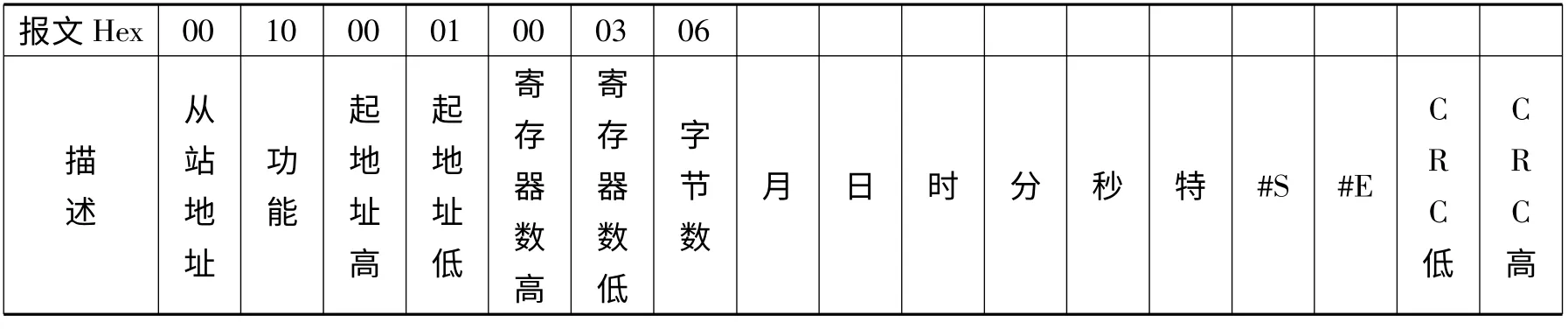
表4 Modbus 报文格式
通信程序可利用该单片机的串口发送程序进行,ModbusRTU 协议实现[6]的关键是CRC 校验。产生CRC 的过程如下:
(1)把16 位CRC 寄存器置成FFFF H;
(2)第一个8 位数据与CRC 寄存器低8 位进行异或运算,把结果放入CRC 寄存器;
(3)CRC 寄存器向右移一位,MSB 填零,检查
LSB;
(4)若LSB 为0,重复步骤(3),再右移一位;若LSB 为1,CRC 寄存器与A00l H 进行异或运算;
(5)重复步骤(3)和(4)直至完成8 次移位,完成8 位字节的处理;
(6)重复步骤(2)— (5),处理下一个8 位数据,直至全部字节处理完毕;
(7)CRC 寄存器的最终值为CRC 值。
(8)把CRC 值放入信息时,高8 位和低8 位应分开放置,先送低8 位,后送高8 位。
需要注意的是,以上第(3)步中的LSB 指的是该步骤移出的这一位,而不是右移一位后CRC 寄存器的最低位,否则将得不到正确的结果。
Modbus 报文格式如表4 所示,从站地址0 表示广播方式,功能10H 表示写多个保持寄存器,起始地址从40001 开始,寄存器数目4 个字 (8 字节),字节数8。
3 结束语
文中介绍的塔式太阳能发电系统中的定日镜阵列聚焦系统节点众多、成本低廉、结构合理、方法可行,有较高的应用价值。也带来每个节点的安装调试工作量大的问题,其节点的布局和镜场总体调度[7]等问题还需要进一步深入研究。
【1】刘笃喜,徐修明,许建社,等.Modbus 协议在分布式伺服测角系统中的应用[J].机床与液压,2007,35 (1):157 -159.
【2】田志勇,戴一平.基于Modbus 总线的变频驱动液压系统设计[J].机床与液压,2010,38 (4):79 -81.
【3】刘俊,刘京诚,谢磊,等. 太阳光自动跟踪装置的设计[J].机床与液压,2010,38 (9):45 -48.
【4】郭铁铮,刘德有,钱艳平,等.基于DSP 的定日镜跟踪控制系统研究[J].太阳能学报,2010,31 (1):5 -11.
【5】关继文,孔令成,张志华.高精度太阳能跟踪控制器设计与实现[J].自动化与仪器仪表,2010 (3):23 -25.
【6】全国工业过程测量和控制标准化技术委员会. GB/T 19582.2-2008 基于Modbus 协议的工业自动化网络规范:第2 部分:Modbus 协议在串行链路上的实现指南[S].北京:中国标准出版社,2008.
【7】辛秋霞,卞新高,杨缝缝.塔式太阳能热发电系统镜场调度方法的研究[J]. 太阳能学报,2010,31 (3):317 -322.
猜你喜欢
中国特种设备安全(2022年1期)2022-04-26 14:16:20
销售与市场(营销版)(2021年10期)2021-11-21 20:15:03
卷宗(2021年2期)2021-03-09 07:57:24
空间科学学报(2020年4期)2020-04-22 01:17:04
销售与市场(营销版)(2019年6期)2019-06-21 01:16:38
西夏学(2019年1期)2019-02-10 06:21:40
制造技术与机床(2017年7期)2018-01-19 02:29:59
网络安全技术与应用(2017年9期)2017-09-20 09:54:28
河南科技(2015年18期)2015-11-25 08:50:14
大众考古(2014年4期)2014-06-26 07:06:10
