
家用服务机器人的结构设计与开发
2013-12-10 14:07齐齐哈尔大学机电工程学院蔡有杰王世刚周长明
电子世界 2013年6期
齐齐哈尔大学机电工程学院 蔡有杰 王世刚 周长明
机器人学的进步与应用是二十世纪自动控制最有说服力的成就,是当代最高意义的自动化,尤其在当今的工业制造中,机器人学已取得了伟大的成就。进入二十一世纪,人们越来越感受到机器人已经深入到人们生产、生活和社会各个领域。当前社会家庭服务也迫切需要,一方面社会老龄化越来越严重,使很多老人需要被照顾,使社会保障和服务的需求也变的更大,老龄化的家庭结构会使很多的的年轻家庭压力增大,而且工作的压力和生活节奏的加快,也使得年轻人没有更多的时间陪伴自己的孩子,随之使家庭服务机器人市场变的更大。另一方面,服务型机器人将会广泛地代替人力从事各种工作,使人类从繁重的、重复单调的、有害健康和危险的生产作业中解放出来。
1.家用服务机器人的主要功能

图1 多功能家用服务机器人功能模块图
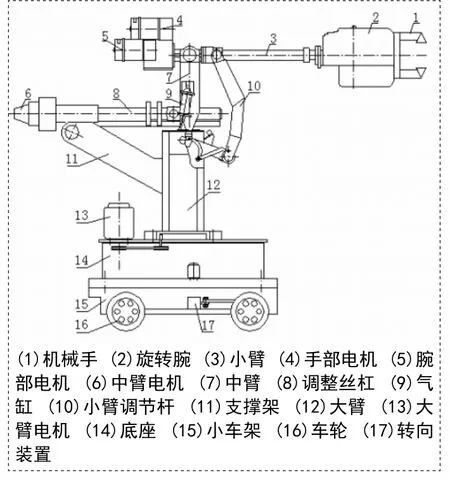
图2 家用服务机器人总体结构示意图
该家用服务机器人机械手爪有夹紧和松开物件的功能,由五个电机驱动五个自由度的运动,由一个电机控制手爪的夹紧和松开以及两个电机驱动四轮小车后轮。这样既可实现整体的旋转、水平、垂直运动及手爪的倾斜、旋转、夹紧、松开运动,也可实现机器人在地面上的空间全方位运动。该机器人可通过手柄遥控控制,也可通过程序自动控制。从手柄遥控或程序发出控制信号到各个相应的接收器,再从接收器传给各个电机,驱动小车以及机器人的运动方向或行程,从而机械手可以夹取或放置物件。多功能家居整理机器人大多是代替人上肢的部分功能,按给定的操作、轨迹和要求进行工作。具体功能模块如图1。
2.家用服务机器人的总体结构
总体结构主要由执行系统、驱动系统、控制系统及检测系统组成。执行系统是多功能家用机器人完成抓取工件,实现各种运动所必需的机械部件,它包括手部、腕部、机身和行走机构等.驱动系统为执行系统各部件提供动力,并驱动其动力的装置。常用的机械传动、液压传动、气压传动和电传动。控制系统是通过对驱动系统的控制,使执行系统按照规定的要求进行工作,当发生错误或故障时发出报警信号。检测系统的作用是通过各种检测装置、传感装置检测执行机构的运动情况,根据需要反馈给控制系统,与设定进行比较,以保证运动符合要求。另外本机还有配重系统,由于自重、承重较大,工作时运动惯性亦较大,为使小臂接近静平衡,将伺服电动机组件、齿形带轮等大质量零部件布置在与腕部相对的另一端。底部小车的主体结构包括底盘、车身、转向机构等,对于小车而言,转向机构与驱动系统的设计是很重要的,只有严格按照阿克曼原理设计出合理的零件长度才能使小车平稳的转向,而不至于出现打滑现象。由于平面等腰梯形连杆机构最常见且加工方便,所以设计采用平面等腰梯形连杆机构小车的转向机构。
具体的机械结构如图2所示,家用机械人的底座通过螺栓连接小车架,小车架内设有驱动电机,小车架的外侧设有转向装置,小车架的下端设有车轮,车轮连接转向装置;底座中心上端通过螺栓连接大臂,底座的上端设有大臂电机,大臂电机通过皮带轮连接设在底座上的小齿轮,小齿轮啮合大臂内底端的齿圈,大臂的侧上端设有斜向支撑架,大臂上端分别连接中臂、气缸底端,气缸的上端连接中臂,支撑架上设有中臂电机,中臂电机连接调整丝杠,调整丝杠连接中臂中间的丝母,大臂的上端中间铰接小臂调节杆,小臂调解杆的上端连接支撑轴的后端,中臂的上端横向铰接支撑轴,支撑轴的尾端分别安有手部电机、腕部电机,支撑轴内设有小臂并伸出支撑轴外侧,小臂的前端安有旋转腕,旋转腕的前端设有机械手,机械手的根部旋转腕内安有扇形齿轮与一轴上的直齿轮啮合,手部电机通过皮带轮连接一轴,腕部电机通过皮带轮连接二轴,二轴的端头设有伞齿轮与旋转腕上的伞齿轮啮合。它可以帮助人们搬运物品还可以进行打扫卫生的简单操作,还可以帮助主人投递垃圾、拿所需物品,还可以拿一些比较有危险性的物品例如炙热的烤盘等等。
3.机器人典型工作过程
家用机械人的底座14通过螺栓连接小车架15,小车架15内设有驱动电机,小车架15的外侧设有转向装置17,小车架15的下端设有车轮16,车轮16连接转向装置17;底座14中心上端通过螺栓连接大臂12,底座14的上端设有大臂电机13,大臂电机13通过皮带轮连接设在底座14上的小齿轮,小齿轮啮合大臂12内底端的齿圈,大臂12的侧上端设有斜向支撑架11,大臂12上端分别连接中臂7、气缸9底端,气缸9的上端连接中臂7,支撑架11上设有中臂电机6,中臂电机6连接调整丝杠8,调整丝杠8连接中臂7中间的丝母,大臂12的上端中间铰接小臂调节杆10,小臂调解杆10的上端连接支撑轴18的后端,中臂7的上端横向铰接支撑轴18,支撑轴18的尾端分别安有手部电机4、腕部电机5,支撑轴内设有小臂3并伸出支撑轴外侧,小臂3的前端安有旋转腕2,旋转腕2的前端设有机械手1,机械手1的根部旋转腕2内安有扇形齿轮与一轴上的直齿轮啮合,手部电机4通过皮带轮连接一轴,腕部电机5通过皮带轮连接二轴,二轴的端头设有伞齿轮与旋转腕2上的伞齿轮啮合。
底座14内可放置蓄电池或外接交流电源并设置无线接收装置,无线遥控装置将指令发送给接收装置,接收装置可按指令驱动电机将小车15前移或后退,其方向由转向装置17改变小车15的转向,到达指定地点后,通过调节小臂调节杆10和调整丝杠8来调整小臂3的仰俯角度,腕部电机5将旋转腕2调节到位,手部电机4通过一轴上的主齿轮23将扇形齿轮向外推开,机械手1张开靠近目标物,然后主齿轮将扇形齿轮向内拉紧夹紧目标物,移动小车15将目标物移动到指定地点,松开机械手1将目标物放下。
4.结论
随着社会不断向前发展,科学技术日新月异,人们的生活水平不断提高,生活节奏也不断加快。在人们的观念中,对生活质量的要求也越来越高。人们在忙碌的工作下,更多追求生活环境舒适和关注生活的轻松氛围。所设计的家用服务机器人能真正满足人们在生活上所需要,能很好地给予提供服务,保证了家庭服务质量,为家庭生活带来了很大的方便。
[1]蔡自兴.机器人学[M].北京:清华大学出版社,2005:24-26.
[2]王劲松,马履中.新型五自由度并联机构及其运动分析[J].江苏大学学报,2004(02):32-33.
[3]丰日美.装卸机机械手的设计优化[J].装备制造技术,2011(05):25-28.
[4]白雪.机械与电气控制技术[M].西北工业大学出版社,2008:32-59.
[5]刘广瑞.机器人创新制作[M].西北工业大学出版社,2007:36-37.
猜你喜欢
机械制造(2022年6期)2022-09-01
包装与食品机械(2021年5期)2021-11-06
环境技术(2021年4期)2021-09-11
制造技术与机床(2019年12期)2020-01-06
组合机床与自动化加工技术(2019年5期)2019-05-24
新商务周刊(2018年12期)2018-12-08
载人航天(2016年4期)2016-12-01
长沙大学学报(2015年5期)2015-01-04
综合智慧能源(2014年1期)2014-09-10
中学科技(2014年3期)2014-06-04
