晶体管PWM直流调速装置的应用
2013-12-07 01:13霍淑兰李瑞福
中国设备工程 2013年6期
霍淑兰,李瑞福,金 重,蔡 丹
(1.中国科学院沈阳计算技术研究所有限公司,辽宁 沈阳 110168;2.中航工业沈阳黎明航空发动机 (集团)有限责任公司,辽宁 沈阳 110043)
坐标镗床的位置精度要求较高,其工作台要求以极低的速度移动,从而获得精确的定位。但工作台以极低的速度移动时,往往会出现爬行现象,这种爬行现象会破坏工件表面的质量。为了避免出现以上情况,对工作台的电机驱动装置提出了较高的要求。
晶体管PWM直流调速装置因其具有频率高、晶体管“结电容”小、电流脉动小及电源的功率因数高等特点,被广泛应用于坐标镗床的工作台运行控制中。
一、晶体管PWM直流调速装置的组成及工作原理
晶体管PWM直流调速系统,是由电流小闭环和速度大闭环组成的双闭环速度调节系统,包括主电路、控制电路、驱动电路三部分。控制回路由速度调节器、电流调节器、三角波发生器、脉宽调制解调器组成。主回路由整流电路及晶体管PWM调制器组成。其部分设计框图如图1所示。
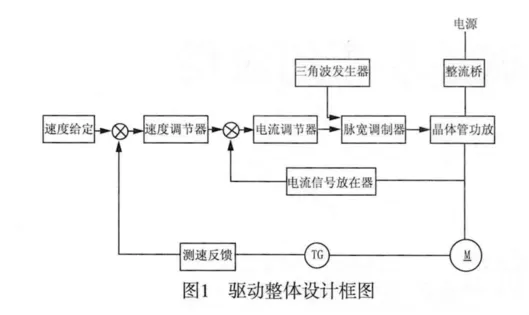
其工作原理是:电源单元为其他功能模块提供+5V、-5V、+12V、-12V直流电源。速度调节器及电流调节器均采用比例积分调节器。两者之间采用相互串联的连接方式,速度调节器输出作为电流调节器的输入,电流调节器的输出作为脉宽调制器的控制电压,控制电压与三角波发生器产生的三角波信号进行叠加,产生脉宽调制方波,此方波经过晶体管功放电路放大后直接驱动电机运行。
二、晶体管PWM直流调速装置在坐标镗床中的应用方案
晶体管PWM直流调速装置具有功能强大、控制更可靠、结构更紧凑、维护保养简单等优点。本案例中采用的直流电机额定直流输出电压0~110V,电流10~20A。
1.系统配置及电气连接。
系统框图如图2所示。方案中,选用晶体管PWM直流调速装置作为坐标镗床的工作台主电机的驱动器,调速器额定电流为20A,速度反馈采用测速发电机反馈形成速度闭环,输出电压非线性误差不超过额定电压的0.1%~0.5%,精度很高。同时,回路系统配有输入电抗器、快速熔断器以及直流电机的散热风机的控制与保护回路。

由于设备内部连锁较复杂,控制要求该系统电动机能够可逆运行,逻辑控制环节采用西门子S7-200小型可编程序控制器来实现,工作台速度通过外接电位器来设定。通过以上控制产品的结合,充分利用了成熟的高新技术使直流电动机的调速系统能在本质上得到极大改善,使坐标镗床充分发挥了它高效稳定的加工能力,创造出较高的经济效益。
2.参数调节。
晶体管PWM直流调速装置设有6个可调电位器,分别为速度调节器比例放大倍数调节、速度调节器输出限幅值调节、反馈电压调节、电流正反馈调节、电流调节器输出限幅值调节及给定电压调节。
设备安装就绪后,需要专业人员根据电机及负载具体情况对各电位器进行调整,设备才能正常运行。
在调试的过程中,加减速时间的调整对工作台有很大影响,如果减速时间太长,会导致切换方向时工作台不能及时停止而冲出限位,发生事故;但如果加减速时间太短,则换向时间太短,工作台容易发生很大的声响。
三、晶体管PWM直流调速装置的有益效果及优点
1.采用在低转速、小电流下的速度自适应技术和并联限流技术而大大的加宽了调速范围,采用直流伺服电动机调速范围可超过1:1 000,可以用于精密数控机床进给控制系统上。
2.该装置可与主电路共地运行,且只需一路控制电源,克服了常规驱动器装置需要多路隔离电源的缺点。同时,可接受40~70Hz范围内的电源频率,而且具有抗电源干扰的性能。电枢控制装置不受相序旋转的影响。
3.该装置是一种双闭环逻辑无环流电枢可逆的调速系统,采用一个带并联限流环节的转速调节器,转速调节器是一个参数分别可调的PI调节器,转速调节器的输出通过限流电路直接驱动触发电路,避免了由于电流内环而产生的延时。低速时,与转速给定有关的反馈改变产生了良好的动态响应。
四、结语
用晶体管PWM直流调速装置控制坐标镗床的工作台后,工作台主传动、进给传动、启制动及调速性能都很好,实践证明该系统具有较高的性能价格比、参数调节方便、自身保护完备以及故障率低等优点,取得了良好的经济效应。
[1]秦继荣,沈安俊.现代直流伺服控制技术及其系统设计[M].机械工业出版社.1999.
[2]黄家善.电力电子技术[M].机械工业出版社.
[3]陈伯宇.电力拖动自动控制系统[M].机械工业出版社,1998.
[4]李五坡.直流电机闭环调速系统的限流措施[M].商丘:商丘职业技术学院学报,2006.
猜你喜欢
科学导报(2022年17期)2022-04-02
大自然探索(2021年7期)2021-09-26
制造技术与机床(2019年7期)2019-07-22
制造技术与机床(2019年7期)2019-07-22
电子制作(2019年11期)2019-07-04
宇航计测技术(2018年3期)2018-09-08
制造技术与机床(2017年10期)2017-11-28
制造技术与机床(2017年8期)2017-11-27
汽车与新动力(2015年1期)2015-02-27
国外科技新书评介(2014年6期)2014-12-17