
高清数码摄像机示踪粒子影像流态检测试验研究
2013-12-06 06:32:10刘自放任庆凯孙浩鹏
长春工程学院学报(自然科学版) 2013年3期
刘自放,任庆凯,梁 丹,孙浩鹏
(长春工程学院计算机工程与技术学院,长春130012)
0 引言
粒子图像测速(Particle Image Velocimetry,PIV)技术是通过对示踪粒子进行图像拍摄得到流场矢量信息的一种流场测量技术。这种测量技术首先要对比重适宜随流场而动的示踪粒子进行瞬时图像采集,图像采集数量与时间间隔视测试任务具体要求与装置的技术性能而定;再利用时间相邻的图像,进行示踪粒子定位与位移分析,进而得到粒子的运动信息;最后通过对示踪粒子运动信息的统计分析,还原出被测流场的流态。
目前,示踪粒子法用于气体、液体、气液两相及多相流态检测已相当普遍,技术日趋成熟。但目前普遍采用的示踪粒子检测方法,多需配置有激光光源的光学摄像系统。这种专门的且复杂的光学系统与价格相对较为昂贵的设备,使一般使用者望而却步。因此使得PIV技术的推广应用受到了限制。
随着普通高清数码摄像技术推向民用,摄像机用图像处理芯片的功能越来越强大,运算速度也越来越快。同时,与之相应的普通微型计算机图形处理软硬件能力的增强,使得采用普通高清数码摄像机与微型计算机搭建PIV平台,进行示踪粒子流态检测成为可能。
这种利用普通高清摄像机、普通光源、普通可视粒子进行PIV测试的方法,是对PIV应用技术的拓展与补充,也有利于加速PIV技术在多领域、多用途方面的推广。
1 试验方法与流程
本试验采用的方法是:利用普通的高清摄像机摄制可见示踪粒子随液体运动的数码影像,然后利用数码影像处理软件将影像转换为系列静止图片,通过对单帧数码图片进行分析处理获取示踪粒子坐标信息,再进行相邻图片粒子坐标信息的比对找到粒子运动轨迹,最终通过统计分析得到被测流场的数据。流态测试流程如图1所示。
2 检测装置与器材
2.1 试验装置
本试验原为检测污水处理装置性能而设。试验容器为透明水箱,呈扁平型,内壁净尺寸长×高×厚为800mm×600mm×100mm,材质为有机玻璃,壁厚0.8mm;箱内水流采用单管排孔侧底部曝气驱动,曝气管顺厚度方向安装,排孔间距10mm,孔径为1mm;气源来自于气泵,气量大小通过针孔阀调节,由气体浮子流量计观测读数。试验装置如图2所示。
2.2 摄像机
试验采用的摄像机为普通高清数码摄像机,1/3.2″CMOS影像感应器,分辨率为1 920×1 080像素,帧速率为30帧/s。
2.3 示踪粒子
本测试中的示踪粒子为肉眼可视粒子,材质为彩色聚苯乙烯塑料小球,表面光滑,粒子密度为1.04g/cm3,粒子直径为5mm。
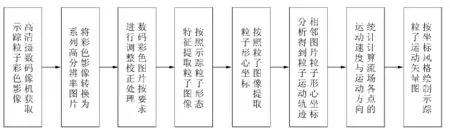
图1 数码影像示踪粒子液体流态检测方法流程图

图2 数码影像示踪粒子流态检测示意图
3 示踪粒子影像处理
普通高清摄像机摄制的示踪粒子数码影像需要利用专门软件和计算机程序进行处理,图像处理的核心为帧图像粒子识别与临帧运动粒子跟踪,整个处理过程可在微型计算机上进行,普通能够进行三维图形图像处理的台式计算机即可胜任数码图片处理工作。通过对数码图片处理信息的分析,可最终得出液体流场的流态分布结果。本试验采用的影像处理方法和流程如图3所示。

图3 数码影像数据处理方法流程图
4 测试过程中的主要技术问题
本试验采用的设备与器材普通常见,搭设试验台简捷方便,试验装置与目前其他PIV方法相比价格低廉,在满足测试要求的前提下,不失为一种可借鉴和推广的方法。采用普通数码摄像机进行流态检测的方法,目前尚未有更多的文献报道,可供借鉴方法有限,下面就本方法中需要解决的主要问题作如下探讨。
4.1 可测试容器的大小
本试验方法可测试的容积尺寸主要取决于数码摄像机的最大像素数与流场测试精度要求。每个像素能够描述的线性尺寸越小,测试精确度越高。测试精确度可用像素解析度P表示,像素解析度P含义为每像素所表示的长度,单位为mm/pix。可测容器最大线性尺寸Xmax与摄像机边长像素数Npix及像素解析度P间的关系可用公式(1)表示如下:

容器线性尺寸指容器的长L或容器的宽B,摄像机边长像素数指摄像机成像画幅长或宽的分辨率。如果摄像机像素数为1 920×1 080,像素解析度为0.5mm/pix,则可测画幅尺寸为960mm×540mm。
4.2 示踪粒子的选择
在测试过程中,粒子的选择要解决以下主要问题。
(1)粒子的材质。粒子选材的主要因素是粒子的密度。在流态检测要求允许范围内,采用粒子密度略大于液体的密度,粒子的重力沉降带来的影响容易处理。在可忽略液体黏度改变的前提下,本试验采用向液体中投加大密度溶质的方法,将液体的密度调整为与粒子的密度相当,将重力对粒子运动的影响尽可能减少到最低,以保证粒子较好的随水性。经筛选,采用了聚苯乙烯塑料小球,其密度为1.04g/cm3,能够满足本实验需要。
(2)粒子的颜色。由于本试验采用的是可视影像捕捉粒子的运动状态,故颜色的选择是示踪粒子成像质量的重要因素。本试验在无色透明的液体中进行,示踪粒子的颜色分别采用了红、蓝、黄、棕、黑5种颜色,经过对比,发现红色粒子图像成像质量最佳。分析其原因,主要是光线在有机玻璃和水中传播时,蓝绿色光线衰减较少,导致图片颜色呈现偏蓝绿的现象。在这种情况下,红色物体产生的影像与背景影像有较好的颜色区分度。
(3)粒子的粒径。本试验中,分别选用了直径为5mm、8mm、10mm的示踪粒子,5mm直径的粒子已经可以达到预期的效果。考虑到粒子的随水性和尽量减小粒子对水流的影响,本试验不考虑在采用直径大于5mm的示踪粒子。
(4)粒子的速度。本试验采用的数码摄像机帧率为1/30s,粒子运动趋势靠相邻两张图片比对取得。如果粒子运动速度过大,则会将实际运动曲线描绘成折线,造成流体运动速度与方向的分析误差。如果将粒子的相对位移控制在容器最大线性尺寸的1/50,则可认为分析误差不大。本实验装置的最大线性尺寸为1 000mm,故粒子在1/25s时间间隔内的线性位移限制为20mm,以此推算,液流的运动速度最大不宜超过0.5m/s。
(5)粒子的数量。粒子数量大,瞬时流态反映效果好,但粒子的追踪识别难度也相应较大;反之粒子数量少,瞬时流态反映效果降低,但粒子的追踪识别难度也相应降低。如考虑粒子线性位移平均距离为10mm,则以该粒子位移终点为圆心,以10mm为半径绘制一圆,如该圆内有其他粒子存在,则有可能与该粒子相撞。粒子相撞产生轨迹交叉,造成后续图像处理难度加大。粒子投放数量采用蒙特卡罗方法,利用计算机模拟试验确定。实验结果(部分样本数值省略)见表1。

表1 模拟粒子随机投放试验数据
由模拟粒子随机投放试验可知,本试验小球数量以不超过50粒为宜。
4.3 实验装置的照明与背景
(1)光源的采用。本试验照明光源分别采用了白炽灯、碘钨灯、日光灯、日光作为光源,以日光照明的方案效果最好,其原因是日光照射具有足够的强度,图片色彩还原好,便于后期数码影像地处理。
(2)光源照明方式。实验的光照方向分别采用了顺光、侧光、顶光、顺测光、顺侧顶光、背光和散射光,以散射光照明的方案效果最好。
(3)摄像背景的处理。试验中,摄像时的背景越简单,后续图像的处理就越容易,试验中采用了普通白背景、带有反光效果的投影幕为背景,以投影幕做背景时效果较好。
4.4 摄像参数的选择
摄像时的参数主要有快门和光圈。
快门的速度。普通摄像机的帧率为1/25s,因此摄像时的快门速度不应低于1/50s,光线充足时,宜选择1/100~1/500s或更短帧曝光时间的快门速度。若快门速度慢,则曝光时间长,运动的示踪粒子会在图片上表现为边缘模糊甚至“拖尾”的影像,造成示踪粒子影像模糊,粒子定位准确度降低。
光圈的取值。光圈数值不仅可以影响影像曝光量的大小,同时还可以影响景深的大小。景深是沿摄像方向能够清晰拍摄物体的长度范围。光圈大,景深小,容易造成景深以外的物体摄制影像不清晰;而光圈小,虽有较大的景深,却难以保证图像有足够的曝光量。为了使摄制的影像在测试容器沿摄制方向的纵深范围内有清晰图像,摄制时应保证景深dL大于测试容器沿摄制方向的厚度。景深影响因素可用公式(2)表示。

式中:F——光圈数值;
δ——允许的弥散圆直径;
L——摄制距离;
f——镜头的焦距。
弥散圆直径δ的含义为:物体上一点在影像感应器上成像时,由于存在像差,成像光束不会聚于一点,且在像平面上形成扩散的圆,该圆称为弥散圆。弥散圆在本试验中限制其直径不应超过一个像素的尺寸,否则造成物体影像模糊,影响成像质量,图像后续处理困难。对于普通高清数码摄像机,采用感光片尺寸约为1/3英寸(1英寸=25.4mm)左右,一个像素单元的尺寸约为0.002mm。若摄制距离为1.5m左右,f为50mm左右,按公式(2)计算,光圈F的数值应取3左右。此时不仅有足够大的光圈,同时景深也满足要求。
5 结语
利用普通高清数码摄像机、普通着色塑料示踪粒子,在保证一定的光源照射强度下,进行透明容器内的液流流态检测是一种可行且易用的PIV方法。
该方法可测试的模型尺寸主要取决于摄像机的分辨率和成像质量,以及测试结果要求的像素解析度。
测试用示踪粒子可采用聚苯乙烯塑料小球,直径可选择为5~10mm,颜色采用红色为宜,密度应略大于测试液体的密度;测试中,采用向液体内加入溶质的方法使液体密度与小球密度相当,以改善小球的随水性;示踪粒子的投放数量可按具体试验情况用计算机模拟试验方法确定。
测试中,光源类型与强度,摄像时主要参数(光圈大小、快门速度、景深大小和摄像距离等)的选择,摄像环境条件(模型后背景、模型表面镜面现象等)等,均能影响成像质量。上述影响因素应在测试摄像过程中予以关注。
测试需进行的数码影像处理,可利用现有图形图像处理制作软件,先进行从影像到系列图片的转换与图片的预处理,以完成示踪粒子的捕捉;然后利用计算机编程的方法解析数码图片,得到示踪粒子的运动信息。得到粒子运动信息数据后,可进一步对其进行分析,得到测试装置内液流流态的矢量图等其他测试结果。
[1]万立国,任庆凯,田曦,等.PIV技术及其在两相流测量中的应用 [J].环境科学与技术,2010,33(12F):463-467.
[2]邵建斌,胡永亭,陈刚,等.水气两相流中气泡运动的PTV跟踪算法研究[J].水力发电学报,2010,29(6):121-125.
[3]张永胜,刘彦军,王金华.利用 Micro-PIV进行微管道内流量测量[J].计测技术,2010(2):12-13.
[4]刘玥,梁忠生,鲍锋.粒子成像测速——非介入式全场技术[J].中国科技信息,2010(13):37-40.
[5]王莉君,朱建新,范程华.基于互相关的虚拟粒子图像示踪方法[J].计算机工程,2012,38(7):190-192.
[6]潘林.城市污水生物处理曝气池流速及流态的实验研究[D].长春:吉林农业大学,2011.
[7]潘林.PIV技术在测试曝气池流态中的应用[J].才智,2011(9):46.
猜你喜欢
大电机技术(2022年1期)2022-03-16 06:40:24
成都信息工程大学学报(2021年4期)2021-11-22 07:44:48
家庭影院技术(2018年11期)2018-12-26 12:55:09
水利技术监督(2017年3期)2017-06-09 06:55:34
影像视觉(2016年5期)2016-06-23 09:17:12
机电信息(2015年3期)2015-02-27 15:54:46
水土保持通报(2014年5期)2014-06-09 08:26:58
数码摄影(2009年8期)2009-10-14 06:37:54
数码世界(2009年2期)2009-09-02 10:16:02
数码家居(2009年7期)2009-08-31 06:46:24
