基于Adams的六足爬壁机器人的步态规划与仿真
2013-11-30 05:01戴伟力
计算机工程与设计 2013年1期
魏 武,戴伟力
(华南理工大学 自动化科学与工程学院,广东 广州510640)
0 引 言
多足爬壁机器人是一种特殊的多足步行机器人,是应用于高空极限作业的一种自动机械装置。它的特殊性在于:①通过足底的吸附装置适应于各种不同情况下不同姿态的支撑;②行走姿态不单是直立行走,还包括侧立行走及倒立行走。更重要的是爬壁机器人通常是高空极限作业,所以对其安全性要求较高。多足爬壁机器人可在建筑、消防、交通等领域完成清洗、救援、检测等作业,具有较为广泛的应用前景。国外,近年来美国的斯坦福大学的Asbeck等人组成的研究小组开发出模拟蟑螂的爬壁机器人SpinyBot,此机器人通过脚上的倒钩刺 “扣”住粗糙壁面凸缘实现爬壁[1]。日本的大阪大学 研制了一款名为ASTERISK的六足机器人,这款六足机器人每条腿有4个关节,能够灵活的在平面上行走,同时,通过足端的倒钩设计,此机器人还能爬垂直的梯子[2]。国内,有哈尔滨工业大学研制的六足移动机器人,足端采用的是微声真空吸盘,可在壁面进行自由的移动[3]。南京航空航天大学开发的四足仿壁虎爬墙机器人,足端采用了一种支杆长为1.4mm、直径为0.5 mm、基底厚度为0.5mm、密集度为435根/6cm2的仿壁虎粘附阵列,以此来实现仿壁虎爬墙机器人的侧立爬行[4]。
本文设计了一种适用于桥底检测的六足爬壁机器人,该机器人每条腿有5个自由度,可以适用于一般六足机器人的任何姿态,通过对六足机器人及爬壁机器人的研究,在横向三角步态的基础上提出了一种适合爬壁的横向四角步态,利用UG设计软件和动力学分析软件Adams并结合相关实验,对这两种步态可行性和合理性进行了分析。
1 六足爬壁机器人本体结构
通常六足机器人的结构设计,尤其是腿部设计,采用的都是3个关节,足末端与地面采用点接触的方式。这样的设计能使六足机器人灵活的在地面上行进。但在桥梁检测中,六足爬壁机器人由于更多的是采用侧立或倒立爬行的方式,所以需要设计一种吸附装置使机器人能贴附于工作表面。
本文所设计的六足爬壁机器人如图1所示,采用真空吸盘式结构,机器人由六条腿和机体共7个相对独立的部分组成。每条腿具有5个自由度,其中髋关节、膝关节、踝关节足关节一和足关节二各具有一个自由度,且都为驱动关节,腿部通过足关节二与真空吸盘相连,髋关节分别与膝关节和踝关节正交(也是目前常用的一种方式),髋关节与机体相连且其轴线方向垂直于机体。髋关节、膝关节和踝关节转动范围分别为[-75°75°]、[-60°60°]和[-125°125°]。由于真空吸盘与支撑面接触时,需要调节真空吸盘的角度,使得真空吸盘面与支撑面平行,所以引入了足关节一与足关节二,在实际运动过程中,通过调节足关节一及足关节二的角度,以便于吸盘的吸附。足关节一与髋关节的转向相同,转动范围为[-180°180°],而足关节二与膝关节转向相同,转动范围为[-60°60°]。
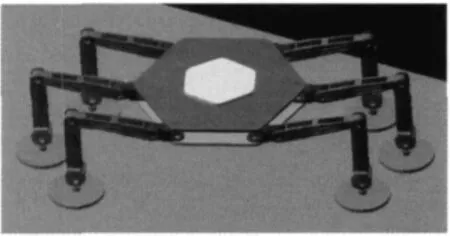
图1 六足爬壁机器人的三维模型
2 运动学分析
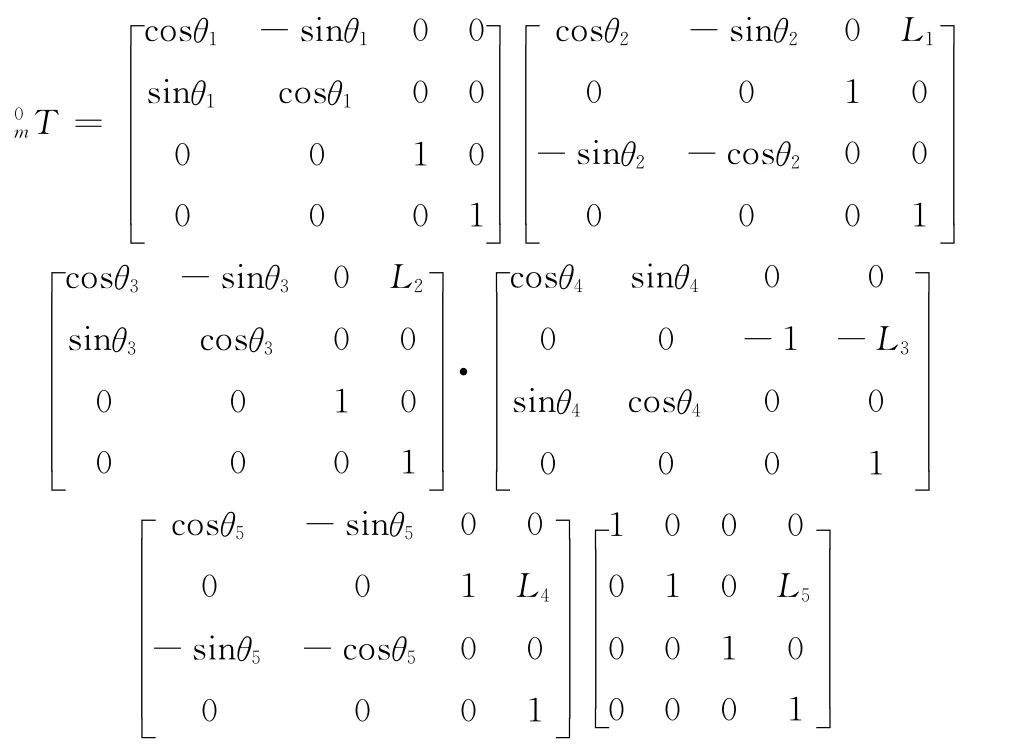
六足爬壁机器人是一个多刚体系统,腿部的5个关节都是转动关节。现以其中一条腿为例,可以把它看作一个机械臂,髋关节和足关节一的轴线方向垂直于地面,膝关节、踝关节和足关节二轴线方向平行于地面,且相互平行,如图2所示。将基坐标系固定在髋关节转轴处,XOZ平面与机身平行,x轴方向为机器人前进方向,z轴方向与机身垂直.利用Denavit和Hartenberg提出的D-H方法建立如图2所示的坐标系.设各关节的转角分别为θ1、θ2、θ3、θ4、θ5,各连杆的长度分别为L1、L2、L3、L4、L5,则机器人足末端的坐标系相对于基坐标系的变换矩阵为

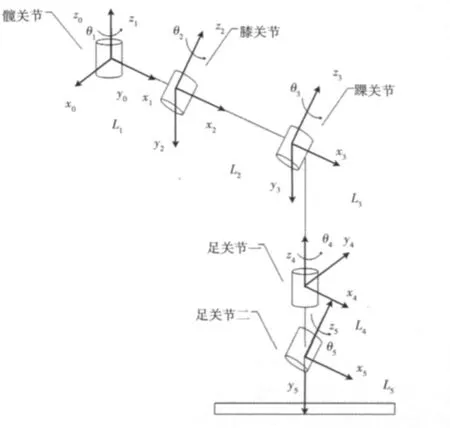
图2 腿部结构
则可以得出
由此也可以算出吸盘端点相对于基坐标系的坐标。
上述的变换矩阵表示了末端点的位姿和关节转角之间的关系,由此可以建立此操作臂的雅可比矩阵.雅可比矩阵不仅可以用来表示操作空间与关节空间之间的速度映射关系,同时也可以表示两空间之间力的传递关系。由雅克比矩阵我们可以得到末端操作速度与关节速度的关系

式中:J——吸盘端点相对于基坐标的雅可比矩阵。
3 步态规划
在机器人研究领域,支撑相和摆动相随时间变化的顺序集合称为步态。对匀速行走的机器人来说,其足相呈周期变化规律。由于这时步态是周期变化的,故称为周期步态[5]。
机器人每条腿接触地面的时间和一个步态周期的比值称为占空比。在一个周期T内,支撑相的时间为t,则该足的占空比按下式计算

一个步态周期中,步行机器人向前移动距离s与机器人足的行程R的关系为

由此也可以得出机器人的平均步行速度为

六足机器人直行时通常采用三角步态。这种行走方式有这样的特点:3条腿(身体一侧的前足、后足与另一侧中足为一组,剩下的足为一组)为一组,交替前行。每一组3条腿的动作保持一致,或处于摆动态或处于支撑态。每个时刻总有3条腿处于支撑态,以此来保持身体的平衡。同时,另一组腿处于摆动态,使身体前进一个步长,所以这种步态是直线行走中速度最快的步态,对于直行的六足机器人往往采用三角步态[6]。
本文所采用的是一种特殊的三角步态,也被称为横向三角步态。是通过一般的三角步态及结合六足爬壁机器人自身的机械结构总结而来的。
考虑到机器人与一般的六足机器人的结构不同,如果采用传统的三角步态,由于吸盘占有一定的面积,腿与腿之间势必会产生干涉,所以规划了一种横向三角步态。如图3所示,机器人的足1、3、5为一组,足2、4、6为一组。在机器人的这种步态中,活动关节为膝关节、踝关节和足关节二,髋关节和足关节处于固定状态。从图中可以看出,通过两组腿的交替支撑与摆动来完成机器人的一个完整步态周期。这种步态的周期T=6s,行进步长为385mm。
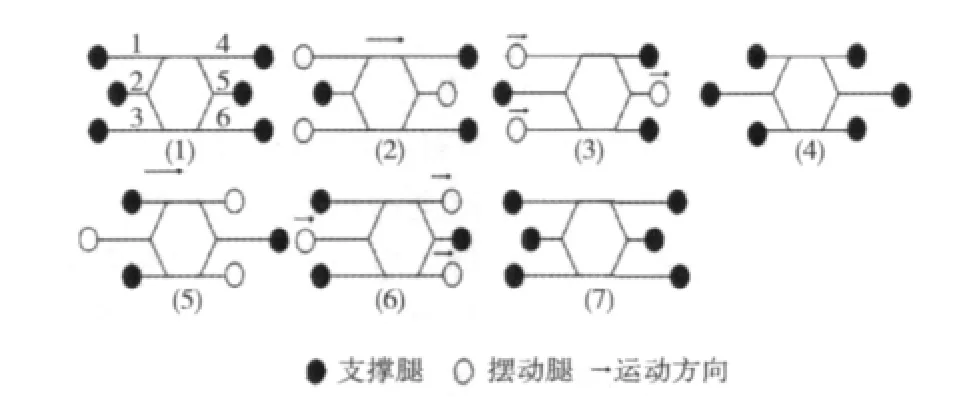
图3 三角步态
由于六足爬墙机器人是一种特殊的六足机器人,它的特殊性在于常应用于侧立行走或倒立行走,出于对它稳定性和安全性考虑,我们提出了一种四脚步态,本文所提到的四脚步态也是由横向三角步态改进而来的。由上面的三角步态的分析,可以看出,三角步态实际上是一种不平衡的步态,这种不平衡性体现在机器人在行进过程中,支撑腿及摆动腿的不平衡,由于支撑腿是一侧的中足及另一侧的左右足,相应的摆动腿是一侧左右足及另一侧一中足,势必造成运动过程中足力的不平衡性,这种问题,在机器人直立行走时不太能体现出来,但是由于爬壁机器人常处于侧立或直立工作状态,必定要在稳定性和安全性方面做出相应考虑,所以提出了以下这种四步态。
从图4中可以看出,这种步态方式把机器人的六条腿分成了1、6,2、5,3、4共3组,其中1、6,3、4组为直接驱动机器人本体前进的支撑组,2、5组的主要作用为1、6,3、4组相转换时增加机器人的支撑点,保证1、6,3、4组由支撑相转为摆动相时至少有4条以上的腿作为支撑腿,保证机器人的安全性和稳定性。同时可以看出,在机器人前进的过程中,左右两边的支撑腿和摆动腿是对称的,这也很好的解决了不平衡的问题。这种步态的设计主要作用为:
(1)保证机器人的安全性,在任意时刻都有至少4条腿作为支撑腿。机器人在直接前进的过程中,左右两侧的支撑腿和摆动腿是对称的,保证足力平衡。
(2)保证机器人的稳定性,通过这种方式可以有效的减小机器人各单腿在运动中的载荷,同时可以减小机器人各关节的扭矩,并且减小了机器人在进行支撑相与摆动相转换过程中力与力矩突变量的大小。
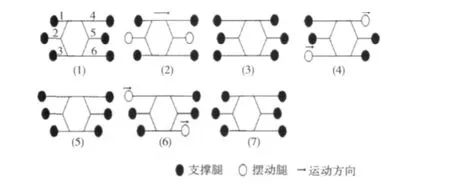
图4 四角步态
这种步态可以适用于机器人侧立或倒立爬行的情况。步态的周期T=6s,行进步长为s=192.5mm。
4 实验与仿真
为验证设计与规划的合理性,在adams软件环境中对所建立的模型进行了仿真实验,并把这两种不同的步态运用到了机器人倒立行进中,通过这两种情况的分析,以验证其优缺点。
图5为爬壁机器人分别以两种步态倒立爬行仿真实验(左图为三角步态,右图为四角步态),实验中机器人质量为130kg,静摩擦系数为0.25,动摩擦系数为0.1。通过仿真,可以看出机器人在行进过程中,机器人在腿部在支撑态与摆动态之间转换灵活,行进速度也较快,机器人各部件之间没有任何干涉,机身保持较平稳状态前进,吸盘与地面之间也没有任何滑动迹象。

图5 两种步态仿真
以两种步态行进过程中3号腿作为研究对象,图6、图7为机器人分别以三角步态和四角步态行进过程中,3号腿髋关节(X)、膝关节(Y)和足关节二(Z)的角速度、角位移以及所受外力矩的大小,从角速度和角位移可以看出,膝关节和足关节二的角速度和角位移大小基本相同,这是因为设计足关节一和足关节二的目的主要是为了协调各关节,以便吸盘更好的与壁面接触,保证机器人的平稳性。从膝关节与足关节的角速度可以看出,第一个波峰要小于后面每个周期的波峰,那是因为机器人在初始态与机器人的行进状态中的姿态不同,通过一个小的角速度补偿,使得机器人从初始状态态转变为运动进态,两种步态调整时间均为3s。
图8、图9为两种步态下机器人在各个方向上的位移曲线(图8、图9中的上图为三角步态的位移图,下图为四角步态的位移图),由于机器人在y轴分量上的位移近似为0,所以图中没有给出。
通过对两组数据的对比,可以看出两种不同的步态各自的优劣,在行进速度方面,三角步态有明显的优势,在一个周期内,三角步态的移动距离为385mm,四角步态为192.5mm,仅为三角步态的一半距离。在安全性方面,三角步态的支撑腿为3只,四角步态的支撑腿为4-6只,由于四角步态的腿在支撑态与摆动态的转换频率较慢,四角步态的平稳性要比三角步态要好。从各活动关节扭矩来看,四角步态各活动关节在相同条件下都小于三角步态,同时从图中也可以看出,四角步态扭矩的突变性大小也明显小于三角步态。
数据分析见表1。
综上所述,三角步态适应于行进速度较快,安全性要求较低的环境,如地势平坦,直立行走的状态。而四角步态适用于安全性要求较高,以安全性来牺牲速度的环境,如侧立爬行和倒立爬行的情况。
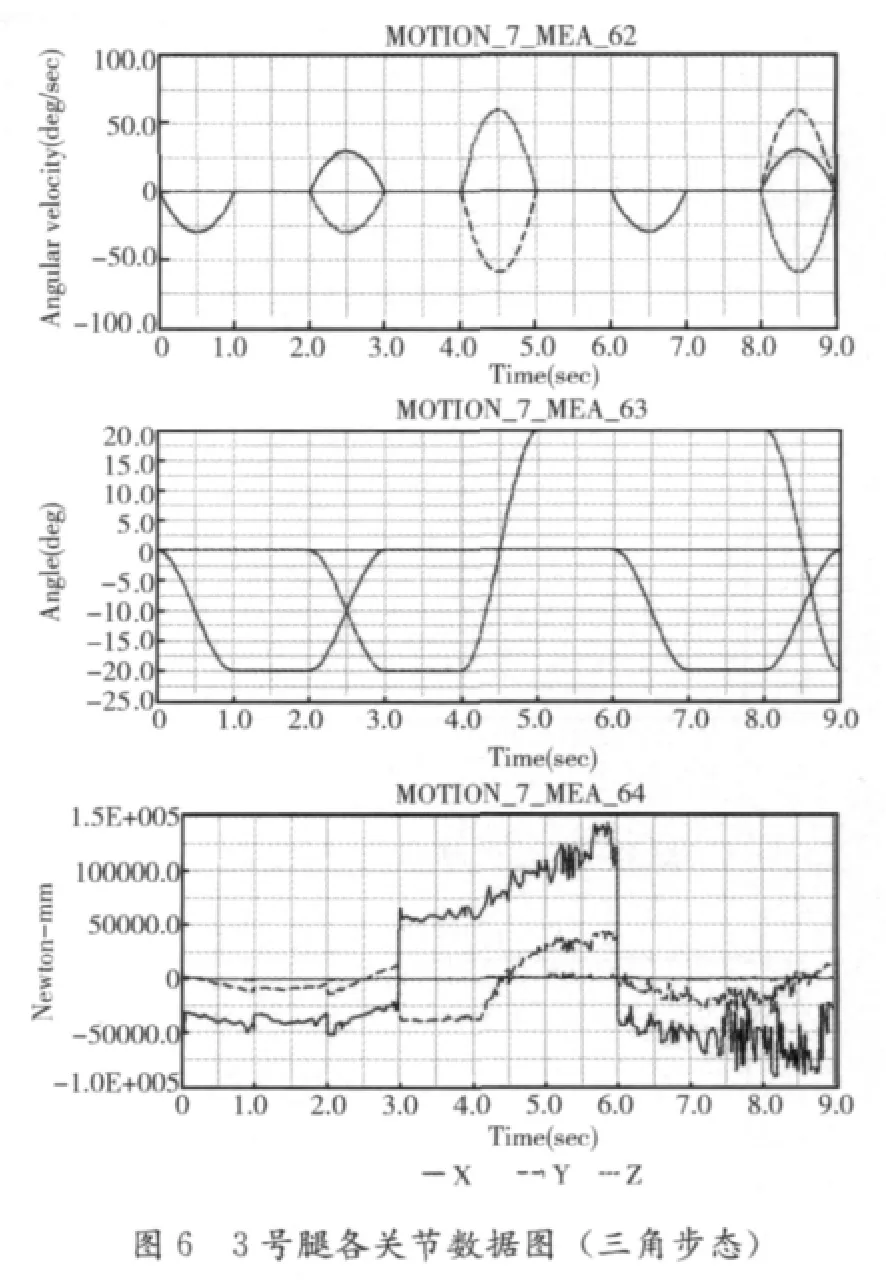
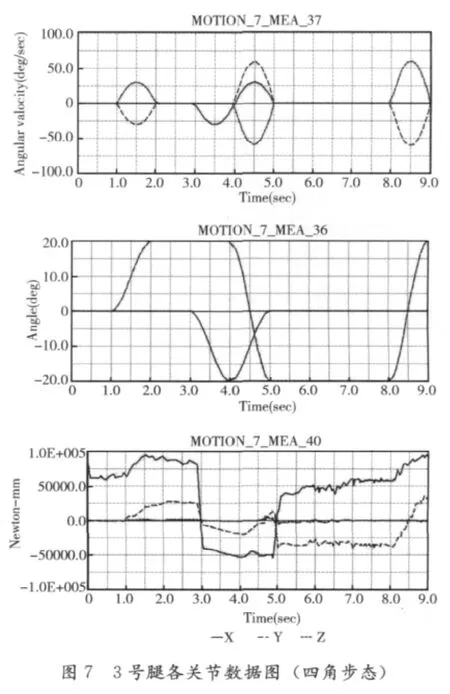

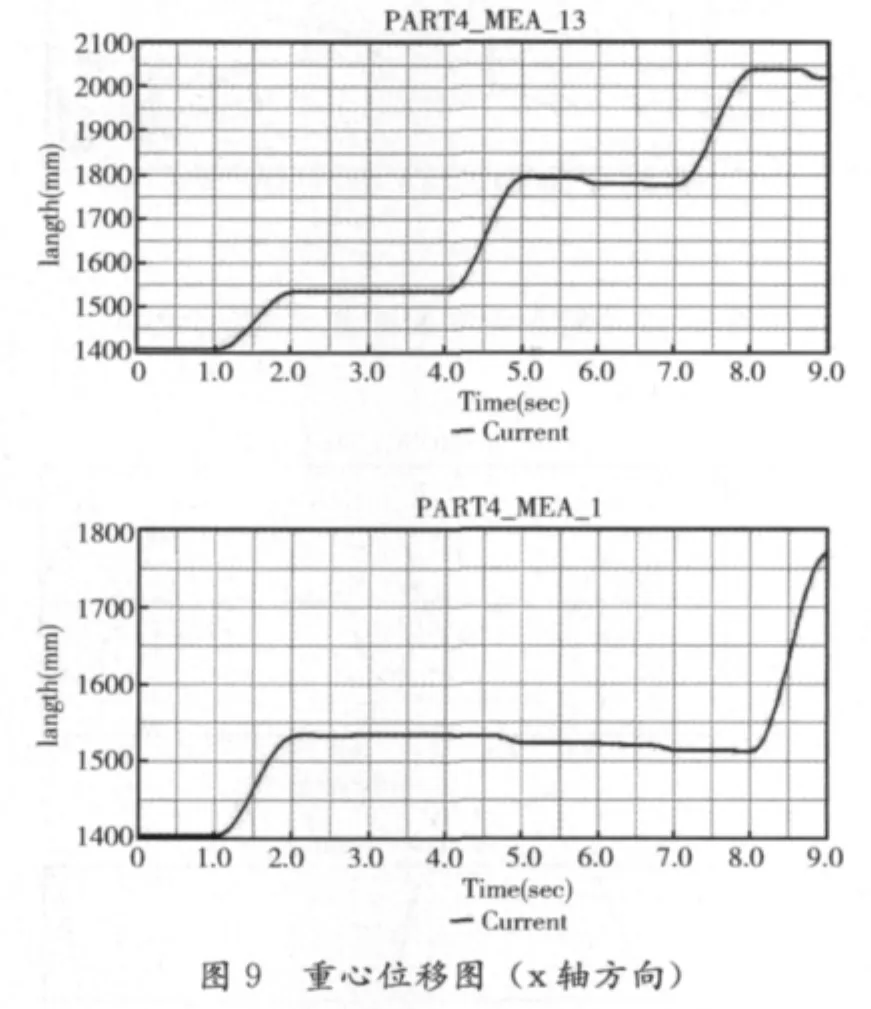
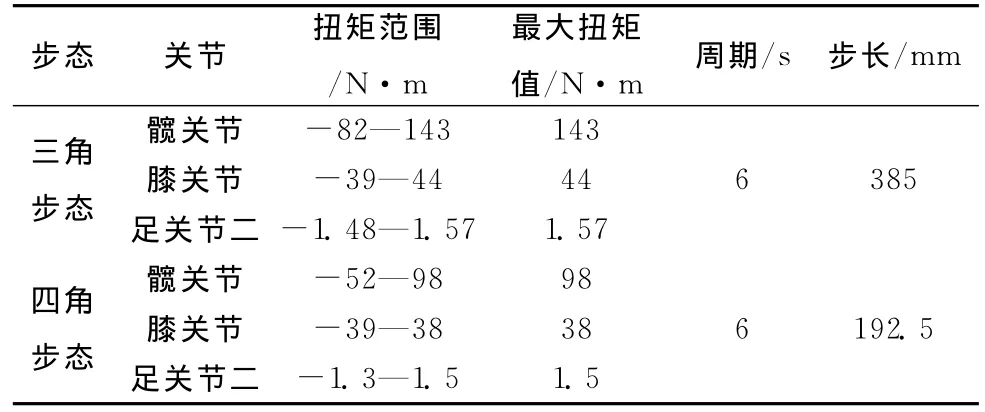
表1 数据分析
5 结束语
本文对六足爬壁机器人的步态进行了分析研究,提出了横向三角步态及由横向三角步态改进而来的四角步态,通过理论分析及仿真实验,在不考虑速度的情况下,横向四角步态比横向三角步态有更好的稳定性和安全性,可适用于六足爬壁机器人侧立爬行或倒立爬行的情况。为实现机器人物理样机在不同桥梁检测环境下的爬行运动奠定了基础。
[1]RiSE.SpinyBot Pages[EB/OL].[2009-07-22].[2009-09-07].http://bdml.stanford.edu/twiki/bin/view/Rise/SpinyBot.
[2]Shota Fujii,Kenji Inoue,Tomohito Takubo,et al.Ladder climbing control for limb mechanism robot “ASTERISK”[C]//IEEE International Conference on Robotics and Automation Pasadena,CA,USA:IEEE,2008:3052-3057.
[3]LI Yang.Research on a little noise six legged wall-climbing robot[D].Harbin:Harbin Institute of Technology(Dissertation for the Master Degree),2007(in Chinese).[李杨.微声六足壁面机器人的研究[D].哈尔滨:哈尔滨工业大学(硕士学位论文),2007.]
[4]RUAN Peng,YU Zhiwei,ZHANG Hao,et al.Gait planning and simulation of gecko inspired robot based on ADAMS[J].ROBOT,2010,32(4):499-504(in Chinese).[阮鹏,俞志伟,张昊,等.基于ADAMS的仿壁虎机器人步态规划及仿真[J].机器人,2010,32(4):499-504.]
[5]RUN Shangbin,HAN Baoling,LUO Qingsheng.Research and simulation of the walking track of bionic hexapod walking robot[J].Computer Simulation,2007,24(10):156-160(in Chinese).[闰尚彬,韩宝玲,罗庆生.仿生六足步行机器人步态轨迹的研究与仿真[J].计算机仿真,2007,24(10):156-160.]
[6]JIN Bo,HU Sha,YU Yaxin.Design of novel hexapod walking robot[J].Mechanical & Electrical Engineering Magazine,2007,24(6):23-25(in Chinese).[金波,胡厦,俞亚新.新型六足爬行机器人设计[J].机电工程,2007,24(6):23-25.]
[7]Spong M W,Holm J K,Dongjun Lee.Passivity-based control of bipedal locomotion[J].IEEE Robotics & Automation Magazine,2007,14(30):1070-9932.
[8]Vidoni R,Gasparetto A.Efficient force distribution and leg posture for a bio-inspired spider robot[J].Robotics and Autonomous Systems,2011,59(2):142-150.
[9]CHEN Fu,ZANG Xizhe,ZHAO Jie,et al.Research on biomimetics mechanism of hexapod walking robot[J].Mechanical and Electronic,2009(9):53-56(in Chinese).[陈甫,臧希喆,赵杰,等.六足步行机器人仿生机制研究[J].机械与电子,2009(9):53-56.]
[10]Kim S,Spenko M,Trujillo S,et al.Smooth vertical surface climbing with directional adhesion[J].IEEE Transactions on Robotics,2008,24(1):65-74.
[11]CAI Zixing.Robotics[M].Beijing:Tsinghua University Press,2009(in Chinese).[蔡自兴.机器人学[M].北京:清华大学出版社,2009.]
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
力学学报(2022年6期)2022-07-10
中国典型病例大全(2022年9期)2022-04-19
机械工程师(2022年3期)2022-03-24
冰雪运动(2020年4期)2021-01-14
电子制作(2018年18期)2018-11-14
自动化学报(2018年6期)2018-07-23
科学与财富(2017年18期)2017-07-09
中华骨与关节外科杂志(2017年1期)2017-05-17
中华骨与关节外科杂志(2016年5期)2016-05-17