北斗二代RDSS与RNSS组合技术分析及应用实例
2013-11-26 05:26:10北方通用电子集团有限公司戎文强
数字通信世界 2013年2期
北方通用电子集团有限公司 姜 萍 戎文强 孙 健
一、引言
北斗二代系统兼具RDSS与RNSS两种业务模式。RDSS属于主动定位系统,兼具短报文通信业务,需要用户发射信号;RNSS属于被动式定位系统,无需用户发射信号。RDSS与RNSS两种业务具有较好的互补性。本文提出了RDSS与RNSS业务从信号处理层到数据处理层的多种组合应用模式,并简要分析涉及的关键技术,包括基于时间不确定度压缩的RDSS辅助RNSS的快速信号捕获技术、RNSS辅助RDSS进行发射频率校准技术、RDSS与RNSS高动态场景的高精度时间同步技术、RDSS与RNSS组合的高精度单点定位技术等。各种技术可应用于军用和民用两个应用体制中,形成单一系统无法实现的应用场景。
二、RDSS与RNSS组合技术关键技术
1.RDSS辅助RNSS快速信号捕获技术
双模用户机是指具备RDSS和RNSS功能的用户机,军用领域的双模型用户机由于需要实现长码直捕功能,需输入能达到一定精度的时间信息。常规状态下的长码捕获的时间信息可由短码捕获、同步后得到的时间信息转换而成。但是,在特定应用环境下可能系统会关闭短码支路,从而造成长码无法得到由短码交接带来的时间信息。在此种应用模式下获得的时间信息,可由用户机的RTC器件保持、以及外部输入获得。其中,由RTC器件保持的时间受制于RTC器件的时间保持精度,且有一定的时间保持限度。而外部输入信息也会遇到高精度时间信息来源以及时间信息输入的问题。
RDSS具备捕获快、获得时间信息快的特点,可采取RDSS定位获取时间信息,也可采用根据星历时间和估算时延计算得到的时间信息。下面以精度稍低的第二种方式为例进行捕获时间获取的过程及精度进行描述。
RDSS部分在达到稳定跟踪后,会在5s~15s内收集齐GEO卫星星历。并且可以从星历信息中提取到发射时刻。通过RDSS载荷所提供星历中的“上行时延”以及估算的下行传播时间,可以得到精确度为10ms以内的卫星信号传播时延,从而得到精确度为10ms的接收机时间。北斗二代系统中RNSS和RDSS的时间基准已经统一,所以可直接用于RNSS捕获模块的时间校准,设置长码捕获的时间不确定度寄存器,从而缩短捕获时间,且不需要其他时间信息来源。根据该架构实现的RNSS长码首次定位时间可缩短为60s。
2.RNSS辅助RDSS发射频率调节技术
RDSS设备入站发射时需考虑发射频率准确度,以确保发射信号可正确入站。所以在动态较高环境下应用的双模用户机,需计算由于动态引起的多普勒叠加至RDSS发射信号频率上的频率偏移,并消除后保持一定的发射频率准确度。用户机的RDSS信号跟踪模块送出的接收频偏由两部分构成:接收机动态引起的多普勒和晶振漂移引起的频偏,要保证发射频率准确度,必须消除多普勒和晶振频偏,但是这两部分的调节方向相反,现有流行的接收机设计尚无法将两种漂移区分开。而双模用户机中此时若RNSS已接收正常,可通过RNSS获取真正的多普勒,结合RDSS的接收频偏区分多普勒和接收频偏,再调节发射频综,保证发射频率准确度。
3.RDSS与RNSS组合的高精度单点定位技术
目前,RNSS系统的定位精度可达到水平10 m(95%),高程10m(95%)的精度指标,如需达到更高的定位精度,可利用局域差分系统进行误差修正。以现行较为通用的GPS差分系统为例分析DGPS系统组成,以提出RDSS和RNSS技术结合的差分定位系统设想。
现行常用的沿海无线电指向标-差分全球定位系统(RBN-DGPS)是一种新型、高精度、高全天候的导航定位系统,为公共用户提供无偿的2m内的定位精度服务。利用信标差分系统在内陆是300km的作用距离,在海上是500km的作用距离。而针对北斗二代系统的特点,可构建改进的北斗二代局域差分系统,即通过RDSS通信手段传递北斗二代RNSS或GPS差分信息,从而扩大局域差分系统的作用。
由于RDSS信道容量有限,基站用户机的用户卡需有一定的频度限制,且需采用指挥用户的通播功能,也可采用专用差分接收ID实现差分信息接收。所以此方案需考虑基准站用户机的信息、发送频度和长度的可实现性,以及妥协策略带来的精度误差。
4.RDSS与RNSS组合的高精度授时技术
RDSS系统具备双向授时功能,其系统设计精度可优于10ns,与通常的GPS授时相比,可提高5~10倍,此功能可用于高动态用户的精确时间同步。
三、应用系统举例
研究分析与初步实践证明,RNSS与RDSS组合可成为未来卫星导航的最佳选择,以满足日益增长的导航定位、通信、授时之需要。下面是RDSS与RNSS组合技术的系统应用举例。
1.通信与定位兼具的个人终端及指挥网络
北斗二代指挥系统依托我国具有自主知识产权的北斗卫星导航定位系统,系统内各类型用户机采用与北斗地面系统统一的技术标准和体制,具有独立完成装备定位、位置报告、态势生成与分发的能力,也可依托其他通信链路,将控制中心获得的各装备位置信息发送到部队指挥所,直接生成我方位置报告,解决现有普通型用户机不支持集群应用问题,突破军队作战、训练、抢险救灾和打击恐怖主义行动中的装备定位和态势感知的瓶颈问题,满足军队信息化建设的急需。其系统架构示意图如图1所示。
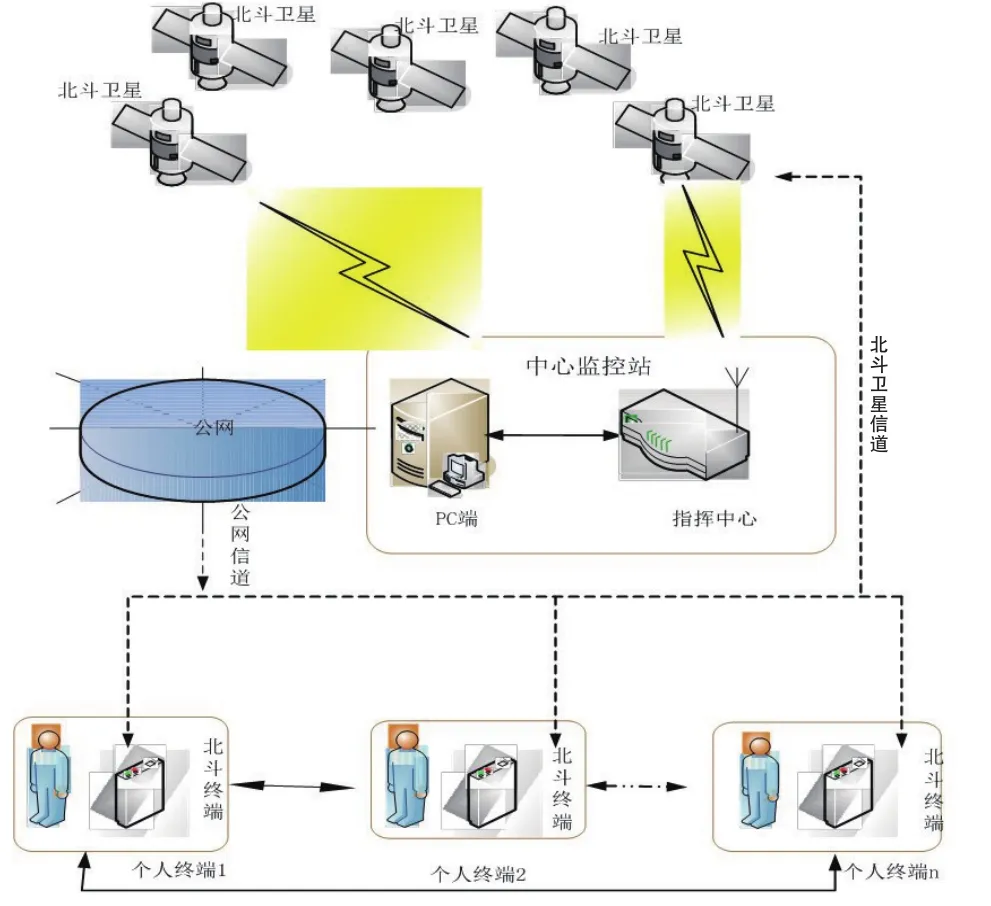
图1 北斗二代指挥系统架构图
指挥网络架构中的个人终端可应用RNSS和RDSS组合技术的各个关键点,成为捕获速度快、定位精度高、可具备短报文功能和其他通信功能的多功能个人位置服务终端,可完成北斗系统位置报告、远程地图分发、特定场所形势汇报等功能,成为适合新形势战场需求的终端设备。
指挥中心的指挥员可以清楚地从数字地图上看到下属各终端的位置活动情况,可以通过指挥管理软件看到各终端的上报内容及各站之间的通信内容。还可响应终端的请求指令,进行动态地图分发等工作。指挥中心还可根据各站回传的信息,综合后进行战场形态分析,发布通播指挥指令或点对点指挥指令。
2.基于北斗二代的渔船监控系统
我国是渔业大国,海洋渔业水域面积300多万平方公里。海洋渔业特点决定了海洋渔业生产是高风险、高危事故高发的行业。如果海洋渔业生产中缺乏有效的通信手段和救援手段,会出现船只遇到险情时无法得到及时救助,以及无法为高水平管理提供有效支撑。
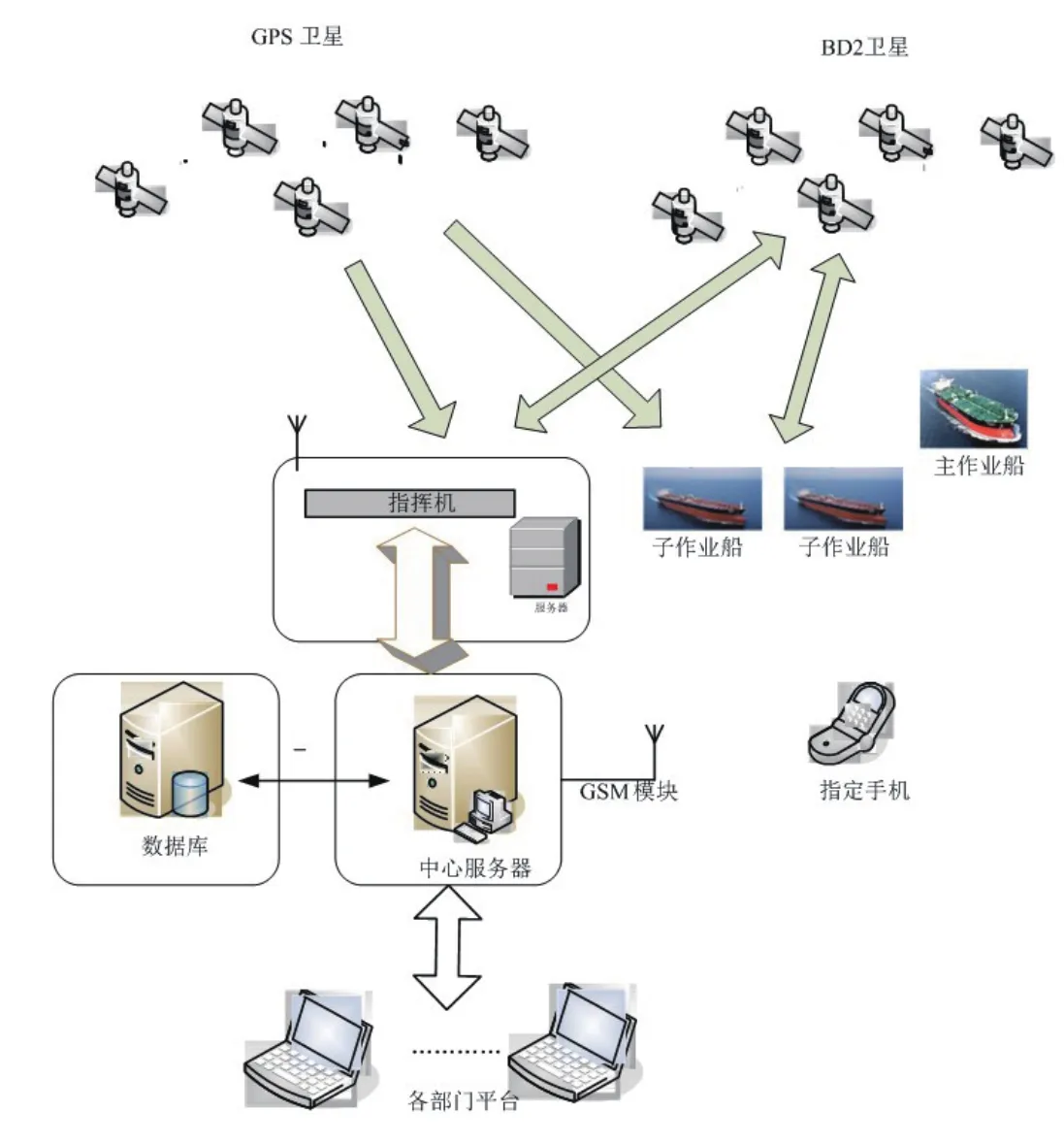
图2 渔船监控系统总体结构图
近年来,我国基于北斗卫星导航系统的远洋渔业监控系统整合了移动通信网络、北斗卫星RNSS和RDSS系统、GPS和互联网等通信网络,实现信息的无缝转发,向海上生产作业者及其关联者提供多种通信网络间的船岸、船间报文互通服务。其系统典型框图如图2所示。
以上述方案实现以北斗卫星定位系统为依托的远洋渔业监控系统,是我国自主研发,不受他国约束,具有很高的安全性和保密性。在此方案中,各作业船整合了GPS、北斗二代RNSS和RDSS,以及GSM通信功能,可利用北斗二代RNSS/GPS进行自身位置确定,在近海时利用GSM通信网络和家人互通。更重要的是,在GSM无法覆盖的海域,当渔船出现触礁、被袭击等危险情况时,可以通过北斗与渔业管理中心联系,上报险情。管理中心可告知并调度遇险船只周围的渔船进行救助,大大缩短救援时间,提高救助效率。
系统中的渔业管理中心配备有北斗二代指挥机,可掌握所有管辖渔船的位置、航行轨迹。当渔船越界打捞,或者在禁渔期进行打捞作业时,渔业管理中心可及时制止,使渔船回到合法作业区打捞或按要求返回。当监控中心收到渔船发出的进出港报告、进入预警区域、遇险报警和报文时,系统能发出不同的声光信号或符号提示,直到人工干预。渔业管理中心还可向出海渔船发送天气、海浪、渔场、渔汛、渔市等信息,方便渔民海上作业。
相比移动通信网络,北斗系统采用卫星作为通信中继,可实现在全国范围内全天候、无盲区的通信覆盖,抗人为和自然灾害影响能力强,不受暴雨、台风等恶劣自然条件影响;北斗系统不需要网络施工和基站建设,投入低,见效快,运行与维护费用低,并且系统安全可靠。GPS定位只能知道自身的位置,却无法将位置发送出去。北斗二代RNSS和RDSS不但能达到GPS同等的位置精度,还能在不增加其他通信手段的情况下将自身位置和状态信息发布出去,同时还可分别实现北斗二代RNSS和GPS以及双系统组合定位,提高了系统可用性和可靠性。相比海事卫星系统,北斗系统的通信费用低廉。
四、结束语
北斗系统由于其独特的高精度定位与短报文功能相结合的特点,可发挥单系统无法具备的的强大应用范围。但是要切实推广北斗系统在军、民领域的应用,还必须解决推广策略、保密性能、用户终端兼容性以及通信带宽等问题,只有解决了这些问题,才能使北斗二代系统真正在各领域发挥应有的作用。■
猜你喜欢
军事文摘(2023年20期)2023-10-31 08:42:08
作文小学高年级(2023年5期)2023-09-06 19:57:41
小哥白尼(神奇星球)(2022年3期)2022-06-06 07:40:04
廉政瞭望(2021年15期)2021-08-23 04:55:22
新世纪智能(数学备考)(2021年5期)2021-07-28 06:19:46
当代陕西(2019年18期)2019-10-17 01:48:50
商周刊(2018年19期)2018-12-06 09:49:41
小学科学(学生版)(2016年5期)2016-12-05 11:02:11
太空探索(2016年3期)2016-07-12 09:58:47
信息安全研究(2015年3期)2015-02-28 20:17:57