
GPS天线相位中心水平方向偏差的检测与校正
2013-11-25 06:24王铁生缑慧娟赵东保
华北水利水电大学学报(自然科学版) 2013年6期
王铁生,缑慧娟,赵东保
(华北水利水电大学,河南 郑州450045)
GPS 技术在测绘领域中应用广泛.利用GPS 静态相对定位测量可获取点的高精度三维坐标,但获取的数据中存在误差是不可避免的. 影响测量成果的误差来源很多,如与接收机有关的误差包括接收机的钟误差、接收机的测量噪声、接收机天线相位中心偏差等,其中接收机天线相位中心偏差(PCO)[1]是由于制造过程中电气化中心与几何中心不一致产生的,对平面测量成果的影响值可达毫米级甚至厘米级[2].因此利用GPS 进行高精度测量定位时,必须对接收机天线相位中心进行检验和校正.
1 常规检测方法及误差分析
目前,按照国家测绘行业《全球定位系统(GPS)接收机检定规程》(GJB 6564—2008)中规定的GPS接收机天线相位中心水平方向偏差检测的常规方法是旋转天线法[3-4].
1.1 旋转天线法
该方法建立在静态相对定位的基础之上,对超短基线进行解算,利用最小二乘原理确定相位中心偏差大小,其原理如图1所示. 将两台GPS 接收机安置在观测墩上,其指北标志指向北方向,固定一台接收机,将另一台接收机分别旋转至0°,90°,180°,270°,然后将两台接收机交换工作,将原固定的天线分别旋转至90°,180°,270°.
这种方法需要进行角度旋转,通常GPS 接收机上不含角度度盘,因此,如果不能确保旋转角度,会对计算结果产生一定的影响. 为了控制旋转角度的准确性,有些学者对旋转天线法[5]进行了改进,如图2所示,利用基座上的3 个脚螺旋控制旋转角度为0°,120°,240°.

图1 常规旋转天线法

图2 改进的旋转天线法
以上两种常规检测GPS 接收机天线相位中心水平方向偏差的方法均是将天线按照一定角度进行旋转,再利用几何图形关系,采用间接平差的方法计算偏差大小的.
1.2 旋转引起的误差分析
利用旋转天线法确定接收机天线相位中心的大小,其关键是计算出旋转前后相位中心偏差大小的关系,从理论上分析,其转换关系如下式:

式中:θ 为从北方向按顺时针方向旋转至接收机指北标志的角度;(δx,δy)为接收机指北标志指向正北时,天线相位中心水平方向偏差;(δx',δy')为接收机天线旋转θ 角度后相位中心水平方向偏差.
利用旋转天线法确定PCO 值的过程中,如果旋转角度θ 存在偏差Δθ(通常取±1°),则旋转后相位中心位置转换关系为:

笔者利用两台已检测出PCO 值的Trimble R8GPS 接收机天线(R8GNSS/SPS88xInternal)来确定由于旋转角不准确引起的相位中心水平方向偏差变化值.首先,根据式(1)和式(2)计算接收机指北标志分别旋转至0°,90°,180°,270°时的相位中心水平方向偏差(δx',δy')及(δx″,δy″);然后,计算接收机天线旋转至不同位置时由旋转角度不准确而引起的相位中心水平方向偏差的变化值(Δδx,Δδy),计算结果见表1和表2.

表1 Δθ=1°接收机天线相位中心水平方向偏差及其变化值 mm

表2 Δθ=-1°接收机天线相位中心水平方向偏差及其变化值 mm
由表1和表2可以看出,当旋转的角度不能与预先设定的角度一致时,会带来一定的误差,进而会影响计算结果.因此在利用旋转天线法计算接收机天线相位中心水平方向偏差时,旋转角度的误差是不可忽视的,应尽量使旋转角度准确,从而获得较为真实的相位偏差值.
2 新检测校准方法
常规的相位偏差检测方法,需要按照预先设定的角度进行旋转,但由于接收机天线上一般不会配备水平度盘,进行旋转时不可能达到理论规定的位置.因此,笔者针对旋转天线法测定天线相位中心水平方向偏差大小时存在旋转角度不准确的问题,提出利用均值法进行偏差的检测及校准.
2.1 检测天线相位中心水平方向偏差的存在性
将两台GPS 接收机安置在观测墩上,利用GPS静态相对定位测量.首先,固定两台接收机天线进行第1 时段观测;然后,固定其中一台接收机天线,将另一台接收机天线旋转任意角度进行第2 个时段观测;最后,进行基线精确解算,并根据基线数据,确定接收机相位中心连线的中点位置是否发生变化,如果发生变化,则说明存在相位偏差,反之,不存在.
2.2 确定天线相位中心水平方向的偏差大小
利用上述检测方法,如果判断出相位中心存在偏差,则需要确定其大小.利用旋转天线法确定相位中心偏差大小,需要克服旋转角度误差的影响. 因此,为了不考虑角度旋转,可以利用求取平均值的方法,如图3所示.

图3 平面几何法
首先进行野外超短基线静态测量:将两接收机天线安置在基线两端,并使检测天线指北标志指向北方向,进行第一时段观测;旋转检测天线不少于3次,进行超短基线的静态相对定位测量;解算基线得到高精度的WGS-84 坐标系下基线向量(dXi,dYi,dZi).然后,将WGS-84 坐标系下的坐标转换成站心地平直角坐标系下的基线向量(dxi,dyi,dhi),其转换关系如下.

式中:B 为大地纬度;L 为大地经度.
计算检测天线在不同位置时的相位中心水平方向偏差Li.

计算接收机天线相位中心在水平方向上的偏差大小(δx,δy).
式中(δx,δy)符号与检测天线指北时计算出的相位偏差保持一致.
3 应用实例
利用一些学者已经得到的实验数据进行分析计算.表3为传统的旋转天线法获取的基线数据,表4为改进后的旋转天线法实验数据. 利用表2与表3的实验数据,采用两种不同的旋转天线法以及笔者提出的新检测方法,计算出两台接收机天线相位中心在水平方向上的偏差大小,结果见表5.
由表5可知:利用两种旋转天线法计算的结果并不一致,应用文中提出的新方法可以计算出接收机天线相位中心在水平方向上的偏差大小,不同的旋转次数,所计算的结果基本一致.

表3 旋转90°基线处理数据表 m
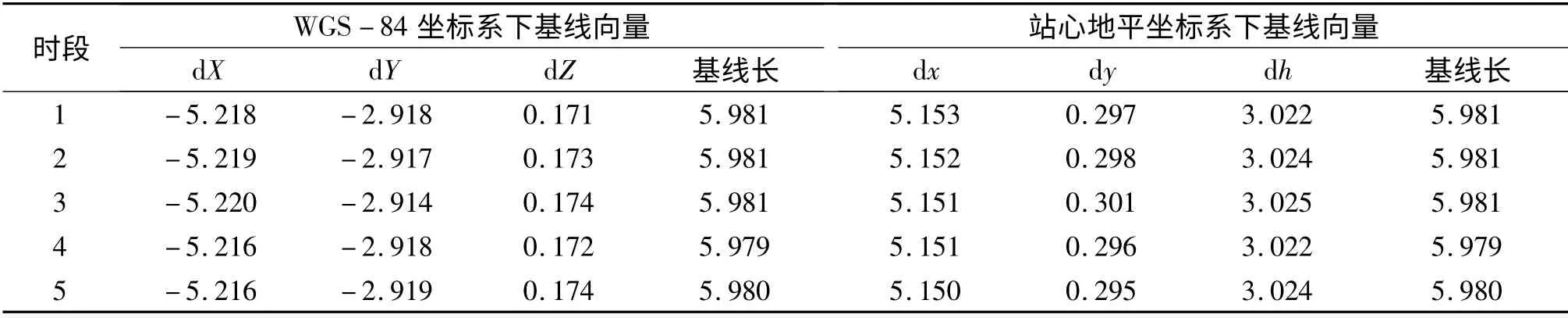
表4 旋转120°基线处理数据表 m

表5 3 种方法计算结果比较 mm
4 结 语
1)GPS 天线相位中心水平方向偏差的大小一般采用旋转天线法进行检测,传统的旋转天线法因为旋转角度不准确对计算结果产生影响,在检测过程中应尽量使旋转角度准确.
2)传统旋转天线法中旋转角度不准确以及天线相位中心具有随机性,在此提出了利用均值法进行GPS 接收机天线相位中心水平方向上偏差的检测和校正,以克服旋转角度不准确的问题.
3)利用文中提出的方法,可以先确定偏差是否存在,再计算偏差的大小,而且不同的旋转次数,所计算的结果基本一致.这种方法不仅作业简单,还克服了旋转角度不准确的问题.
[1]吴正,胡友健,敖敏思,等.GPS 天线相位中心改正方法研究[J].地理空间信息,2012,10(6):56-58.
[2]李征航,黄劲松.GPS 测量与数据处理[M].2 版.武汉:武汉大学出版社,2010.
[3]陈逸群,刘大杰.GPS 接收机天线相位中心偏差的一种检定与计算方法[J].测绘通报,2000,30(12):15-16.
[4]魏锦德,黄张裕,邱华旭,等.GPS 天线相位中心偏差的水平分量检测与改正[J].勘察科学技术,2013,6(1):48-50.
[5]魏锦德,黄张裕,海美,等.GPS 天线相位中心误差的检测与改正[J].测绘科学技术学报,2012,29(6):410-413.
猜你喜欢
科学(2020年5期)2020-11-26
学生天地(2020年6期)2020-08-25
数学年刊A辑(中文版)(2020年2期)2020-07-25
中国惯性技术学报(2019年3期)2019-10-15
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
舰船电子对抗(2016年5期)2016-12-13
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
系统医学(2016年8期)2016-02-20
