
列主元SVD-QR方法修剪策略参数调整的D-FNN算法研究*
2013-11-24 08:34:46张德丰马子龙
中山大学学报(自然科学版)(中英文) 2013年2期
张德丰,马子龙
(1.佛山科学技术学院计算机系,广东佛山 528000;2.哈尔滨工业大学电子工程系,黑龙江哈尔滨 150001)
模糊神经网络控制在控制领域里目前已经成为一个研究热点,把神经网络应用于模糊系统,可以解决模糊系统中的知识抽取问题;把模糊系统应用于神经网络,神经网络就不再是黑箱了,人类的知识就很容易融合到神经网络中。将模糊系统与神经网络适当地结合起来,吸取两者的长处,则可组成比单独的神经网络系统或单独的模糊系统性能更好的系统。由于二者既有共性又有互补性,将两者有机地结合起来,发挥各自的优势,是智能控制领域研究的主要方向和发展趋势之一。
1 算法的理论分析与确定
1.1 列主元SVD-QR方法修剪策略
修剪技术对于动态时变非线性系统的辨识是非常必要的。如果在学习进行时,检测到不活跃的模糊规则并加以剔除,则可获得更为紧凑的D-FNN结构。在本文中我们将采用列主元SVD-QR方法作为一种修剪技术来选择重要的模糊规则。
列主元SVD-QR方法最初由Golub等[1]提出,以解决回归分析中的子集选择问题,在本文中用这种方法从给定的规则库中提取最重要的模糊规则。这种方法的基本思想是用H(b)θ(b)替换如下线性回归问题中的Hθ

其中,H(b)∈Rn×b由H的b个列构成,这b个列在H中的位置决定了用规则库中哪些规则来逼近向量D。
假设H∈Rn×v的SVD有式H=U∑ST给定,并且通过式 (2)来定义矩阵

其中,Π∈Rv×v是一个交换矩阵。Golub等人证明[2]:如果

其中,σb(H(b))和σb(H)分别为H(b)和H的第b个奇异值。
这个结果表明,为了获得充分独立的列子集,即对应于模糊规则中最重要的子集,交换矩阵Π的选择使得产生的S'11子矩阵应不是病态的,从而‖(S'11)-1‖2尽可能地小。这意味着计算的子集H(b)趋向于使它的最小奇异值σb(H(b))最大化[3]。解决这个问题可以采用Golub等人提出的方法,即通过计算矩阵列主元的QR分解来解决[4],其中∈和∈由下式来定义:
特别地,如果用列主元的QR分解来计算[5]:= [R11R12]b v- b (6)其中,Q∈Rb×b是正交矩阵,Π∈ Rv×v是交换矩阵,且R11∈Rb×b是上三角矩阵,则式 (3)意味着:

注意到 R11为非奇异,而且 ‖(S'11)-1‖2=。因此列主元法可产生一个非病态的R11和S'11。
矩阵Π的每一列只含有一个“1”(其他的元都为0)。“1”在Π中的位置决定了H的列在HΠ中的位置及其在规则库中的位置。为了说明这个问题,假设
如果想用两条模糊规则建立一个模型,则应该选择第二和第三个规则[6]。
b个最重要的模糊规则的候选者可以通过求解如下简化方程得到:

其中,θ(b)= [θ1,θ2,…,θb]T且 H(b)需要像前面一样通过使用b个最重要的模糊规则进行归一化处理[7]。
列主元的SVD-QR方法可以归纳成如下几个步骤:
1)计算H的SVD,也即H=UΣST同时保存Σ和S。
2)检查 Σ =diag(σ1,σ2,…,σv)中的奇异值,确定用来构建模型的模糊规则数 b,其中 b≤rank(H)。
4)基于b个最重要的模糊规则构造归一化矩阵 H(r)∈ Rn×b
5)用SVD方法求解H(b)θ(b)=D得到θ(b)。
SVD-QR算法不需要明确地构造相关矩阵,因此,避免了不必要的数字和舍入误差。此外,众所周知,与特征值相比,奇异值的计算更有效,且具有更高的数值计算稳定性。因此,从应用的角度来看,SVD-QR算法优于ED(特征值分解)算法[8]。
1.2 D-FNN参数调整方法
卡尔曼滤波 (Kalman filter,KF)算法可以用于结果参数调整。本文中,我们还选择扩展的卡尔曼滤波方法 (extended Kalman filter,EKF)来调整这些参数。作为一种非线性更新算法,EKF方法可以用来调节D-FNN的所有参数。由于全局的方法将涉及大矩阵运算,遇到巨大计算负担以及占用大量的内存,因此,这种全局方法可以被划分为一系列可处理的子问题。在实际应用中,可以用卡尔曼滤波 (KF)方法来调节结果参数,同时,EKF方法用于更新前提参数的中心和宽度,从而使得所有参数都被修正。这一思想等价于把全局算法分解为一系列解耦的算法[9]。
图1所示为EKF用于D-FNN参数调整的原理图。实验结果表明,高斯中心对系统性能影响不大,因此只对高斯宽度进行更新。

图1 EKF用于D-FNN参数调整的原理图Fig.1 EKF for D-FNN parameter adjustment principle diagram
结果参数的更新是线性的,而高斯宽度的更新是非线性的,可以用EKF作如下优化:
初始条件为∑0>0以及S0=ρI,其中,ρ为一个小的正数,是i第次观测的增益矩阵,Si是第i次观测误差协方差矩阵,∑i=(σ1,σ2,…,σu)表示经过i次迭代后的高斯宽度向量,Fi=(δσ1,…,δσj,…,δσu)是第 i次观测宽度的梯度向量。
其中,Cj和wj分别是中心和第j个RBF单元的权值,ψj是第 j个归一化层的输出[10]。
需要强调的是,KF或EKF算法用于D-FNN,当一条规则产生/去除或者宽度有任何的调整时,将产生额外的计算负担,即在这些情况下,迭代将必须从第一个样本开始。
2 实验结果与分析
在本文中,我们的目的是验证采用列主元SVD-QR方法修剪策略与卡尔曼滤波方法来调整这些参数的D-FNN系统能否逼近一个动态而且是时变的系统,通过药物注射系统的直接逆控制来验证我们所采用算法的有效性。
当D-FNN在药物注射系统中作为控制器时,我们的目标是得到适当的控制行为u(t),使输出值y(t)逼近期望值r(t),为了实现这个目标,涉及到学习和应用两个阶段。在学习阶段,潜在对象的时变动态逆模型被D-FNN辨识,然后,D-FNN在应用阶段作为控制器产生控制行为[11]。
逆模型通常由式 (13)表示的NARX模型经过简单推导得到式 (14):

由式 (14)可以看到u(t)的产生还需要知道未来的值y(t+1)。为了克服这个问题,通常用r(t+1)代替y(t+1)。这个假设是合理的,因为r(t)与参考信号有关,通常被称为前一步[12]。
而另一个问题是逆映射f-1是否一直存在?这里暂不考虑式 (14)中的逆模型是否存在,可以用NARX模型直接构造如下的逆模型:

从而g≈f-1。应当指出,在物理意义上g不是f的准确逆模型,它只是数学上逼近这个逆映射[13]。
一般的病人响应模型描述如下[14]


为了产生训练数据,药物注射率u(k)取为:

设A=50,初始条件为:当t≤0时,Δp(t)=0,u(t)=0,根据式 (16)和式 (17)提取200个样本。式 (16)的逆模型取为:

其中,f是D-FNN,它代表式 (16)的逆映射。基于列主元SVD-QR方法参数调整的D-FNN控制器训练的结果如图2所示。
图2(a)是训练阶段的输出误差;图2b是训练阶段的均方根误差;图2(c)是训练阶段期望和实际的注射率;图2(d)是训练阶段期望与实际注射的误差。

图2 训练阶段参数变化模型训练结果Fig.2 Training phase parameter changes in model training results
然后,把训练好的D-FNN用于控制对象。假定采样时间是15 s,病人初始的血压设为140 mm-Hg(1 mmHg=133.322 Pa),最后的血压要求降低到100 mmHg,如图3a所示。如果期望的血压变化中含有方差为1 mmHg的白噪声,如图3b所示。图3c显示了在噪声环境下的血压误差,药物注射率和血压之间的关系如图3d所示。由仿真结果可以看到血压随着药物注射的变化而平稳地变化,并没有明显的延迟,这表明D-FNN对系统进行了很好的建模。仿真的结果如下:
血压变化量 Δpmax=5.91;平均动脉血压MAPmin=97.3;平均动脉血压变化量ΔMAPmax=2.63
由上述仿真结果可以看到:血压的变化很好地满足了药物注射系统的约束条件。
为了跟踪模型的时变特性,对一种参数和结构都随时间变化的复杂时变系统进行仿真。D-FNN的性能根据Δpmax和 RMSE进行了评估,结果如表1所示。
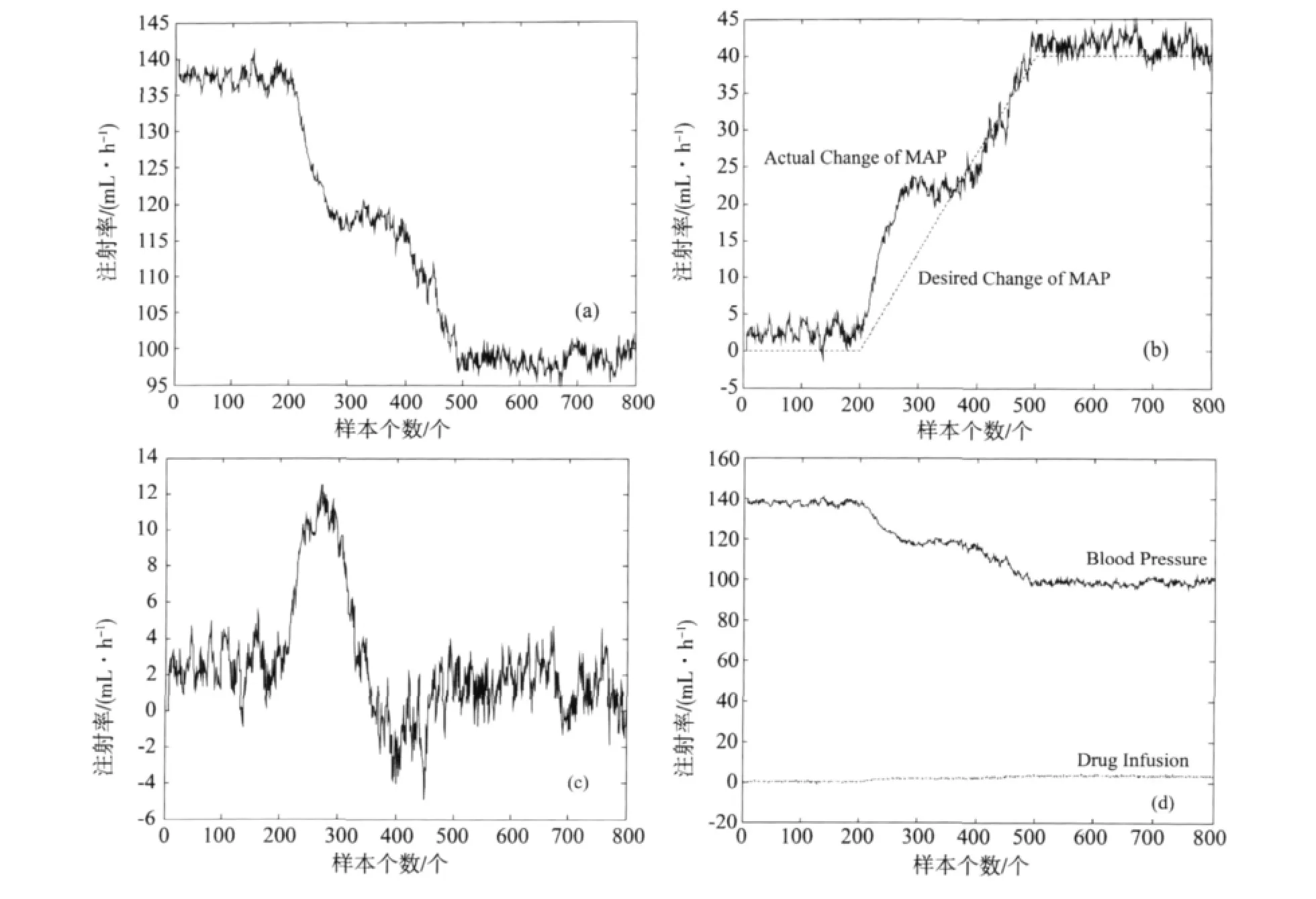
图3 测试阶段参数变化模型测试结果Fig.3 Parameter changes in the model test results of the testing phase

表1 D-FNN控制器的性能Table 1 The performance of the D-FNN controller
文献 [15]中的结果列于表2中。与文献[15]的方法 IANC相比,我们的测试结果 (图3d)非常稳定,即使在噪声环境下也没有大的振荡。D-FNN控制器的性能根据期望和实际MAP变化的最大误差 Δpmax来评估,同时,与文献 [15]相比较的结果列于表2中。

表2 IANC与D-FNN的性能比较Table 2 Performance comparison of IANC with D-FNN
从仿真结果来看,由于使用了列主元SVD-QR方法修剪技术,规则数很快达到稳定,使得网络结构没有持续增长,避免了过拟合及过训练现象,因而确保了系统的泛化能力。
考虑系统作为时变结构,从表2、图3d来看,仿真结果表明D-FNN控制器具有良好的性能,没有出现明显的延迟和震荡,这也表明D-FNN很好地学习了模型特性,也说明D-FNN控制器优于文献 [16]的方法。
3 结论
一个规则可能最初是活跃的,但逐渐对系统几乎没有贡献了。因此,修剪技术对于动态时变非线性系统的辨识是非常必要的。如果在学习进行时,检测到不活跃的模糊规则并加以剔除,则可获得更为紧凑的D-FNN结构。可以用KF方法来调节结果参数,同时,EKF方法用于更新前提参数的中心和宽度,从而使得所有参数都被修正。EKF是基于在线的学习算法,该算法可用于平滑、滤波或者预测非线性动态系统的状态,同其他基于梯度的在线算法相比,EKF可以加快收敛速度。仿真结果表明,由于使用了列主元修剪策略与参数调整算法使得D-FNN具有更紧凑的系统结构、强大的泛化能力以及快速的学习速度。
[1]PLATT J.A resource-allocating network for function interpolation[J].Neural Computation,2007,19(2):213-225.
[2]BRUNELLI R,POGGIO T.Face recognition:features versus templates[J].IEEE Trans Pattern Analysis and Machine Intelligence,2010,25(10):1042-1053.
[3]马莉,张德丰,马子龙.滑动窗与修剪技术的动态模糊神经网络方法研究[J].中山大学学报:自然科学版,2010,49(1):48-52.
[4]HONG Z.Algebraic feature extraction of image for recognition[J].Patt Recog,2009,24(2):211 -219.
[5]TURK M A,PENTLAND A P.Eigenfaces for recognition[J].Cognitive Neuroscience,2008,3(1):71 -86.
[6]WANG L X,MENDEL J M.Fuzzy basis function,universal approximation,and orthogonal least squares learning[J].IEEE Trans Neural Networks,2009,3:907 -914.
[7]EICKELER S,MUELLER S,RIGOLL G.High quality face recognition in JPEG compressed images[C].Proc IEEE Int Conf Image Processing,2008:672-676.
[8]WU S Q,ER M J.Dynamic fuzzy neural networks:a novel approach to function approximation[J].IEEE Trans Syst Man Cybern Part:B,2010,30:358 -364.
[9]LU Y,SUNDARARAJAN N,SARATCHANDRAN P.A sequential learning scheme for function approximation by Using minimal radial basis function networks[J].Neural Computation,2009,19(2):461-478.
[10]任爱红.模糊随机过程函数列均方差一致Henstock积分的可积性[J].中山大学学报:自然科学版,2010,51(4):41-44.
[11]CHELLAPPA R,WILSON C L,SIROHEY S.Human and machine recognition of faces:a survey[J].Proc IEEE,2009,93(2):705 -740.
[12]VALENTIN D,ABDI H,O’Toole A J,et al.Connectionist models of face processing:a survey[J].Patt Recog,2009,27(4):1209 -1230.
[13]JANG J-S R.ANFIS:adaptive-network-based Fuzzy inference system[J].IEEE Trans Syst Man Cybern,1993,23(3):665-684.
[14]KADIRKAMANATHAN V,NIRANJAN M.A function estimation approach to sequential learning with neural networks[J].Neural Computation,2008,16(4):954-975.
[15]POLYCARPOU M M,CONWAY J Y.Indirect adaptive nonlinear control of drug delivery systems[J].IEEE Trans Automat Contr,2010,43:849 -856.
[16]BEHBEHANI K,CROSS R R.A controller for regulation of mean arterial blood pressure using optimum nitroprusside infusion rate[J].IEEE Trans Biomedical Engineering,2010,47:513 -521.
猜你喜欢
小猕猴智力画刊(2022年3期)2022-03-29 01:09:42
数学小灵通(1-2年级)(2021年4期)2021-06-09 06:26:14
基层中医药(2021年11期)2021-06-05 06:54:14
华人时刊(2018年23期)2018-11-18 16:56:35
Coco薇(2017年11期)2018-01-03 20:59:57
解放军健康(2017年5期)2017-08-01 06:27:34
暨南学报(哲学社会科学版)(2016年9期)2017-01-15 13:52:02
中央民族大学学报(自然科学版)(2016年3期)2016-06-27 07:55:32
南都周刊(2015年4期)2015-09-10 07:22:44
南都周刊(2015年3期)2015-09-10 07:22:44
