
电动摩托车无刷直流电动机智能控制器设计
2013-11-22 07:51黄海波梅建伟兰建平
微特电机 2013年9期
黄海波,梅建伟,兰建平,张 凯
(湖北汽车工业学院,湖北十堰442002)
0 引 言
电动摩托车无刷直流电动机控制器已由早期的纯模拟器件[1],发展到目前的以DSP 等高性能微处理器为核心的数字化控制时代[2],为无刷电机控制的功能扩展和更新换代提供了非常便利的条件。目前普遍采用基于PID 的速度电流双闭环控制策略,难以满足无刷电机动态响应和高性能高精度的要求。因而人们研究了各种改进的控制策略,如神经网络[3]、滑模变结构[4]、微粒群[5]等算法,这些算法虽然达到了较好的实验效果,但由于其复杂性且难以实时实现,大都处于计算机仿真和验证阶段。
由于电动摩托车运行环境非常恶劣,而微分项对噪声极其敏感,因此无论对速度还是电流均不采用微分调节。针对常规PID 控制的缺点和复杂算法的难以实现问题,对无刷直流电动机双闭环控制策略进行改进,其中速度外环采用参数自整定模糊PI控制,电流内环采用基于积分分离的PI 控制。同时,为降低成本,采用高性能8 位单片机stm8s103,实现了电动摩托车无刷直流电动机的智能控制。
1 系统控制策略
无刷直流电动机速度电流双闭环控制如图1 所示,单片机通过霍尔信号不仅知道了转子空间位置,以此作为确定功率逆变电路的开关信号,而且还可以计算出电机的运行速度,以此反馈速度与设定转速一起作为自适应模糊速度调节器的输入。模糊速度调节器的输出作为电流内环的设定值,与电流检测单元的反馈电流一起又作为积分分离电流调节器的输入。电流调节器输出一定占空比的PWM 信号,结合霍尔检测出的位置关系来控制逆变电路功率MOSFET 的导通与关闭。
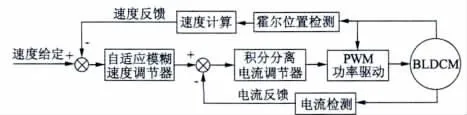
图1 无刷直流电动机控制结构
1.1 自适应模糊速度调节
自适应模糊速度PI 调节器如图2 所示,设定速度n0和反馈速度n 的误差e 和误差变化率ec作为输入变量,输出变量Kp、Ki作为PI 控制器的输入。根据电机的运行特性建立模糊规则表:
(1)在电机起动或加减速阶段,误差| e | 较大,为了加快起动速度,Kp取较大的值;为了避免超调造成的系统不稳定,这时应当限制K,取较小的值。
(2)当反馈速度接近于设定速度时,即误差| e |为中等大小时,在保证较好的响应速度的前提下减小系统超调,这时Kp取较小的值,Ki取中等大小的值。
(3)当电机进入稳态调速时,即误差| e | 较小时,为了保持电机的稳态调速性能,这时Kp和Ki都取较大的值。
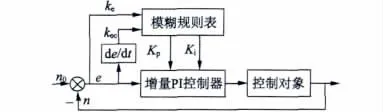
图2 自适应模糊速度PI 控制器
在实际电机控制过程中,输入变量e、ec和输出变量Kp和Ki的值域都是不对称的,设它们的变化范围分别为[emin,emax]、[ecmin,ecmax]、[Kpmin,Kimax],它们的归一化模糊论域均为[-1,1],正则化变换公式分别:
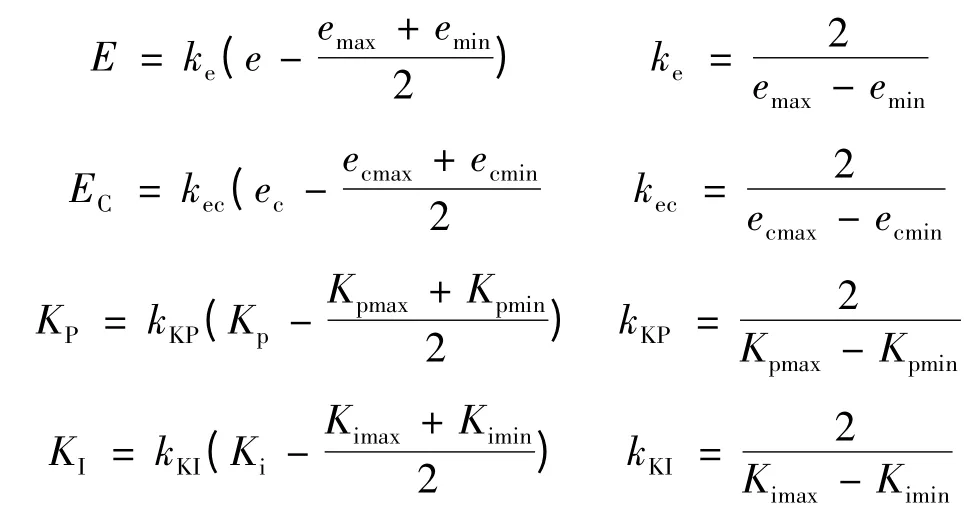
这里,E、EC、KP和KI分别是e、ec、KP和KI的模糊语言变量,ke、kec是输入变量e 和ec 的量化因子,kKP、kKI是输出变量KP和KI的量化因子。E、EC、KP和KI均采用相同的模糊子集{NB,NM,NS,ZO,PS,PM,PB},隶属函数采用对称均匀分布全交迭的三角形形式。采用常规模糊条件和模糊关系IF Aiand BiTHEN Ci形式建立模糊规则表。根据Mamdani 的min-max 合成法,得到采用加权平均解模糊化的输出KP和KI,最终的实际输出:
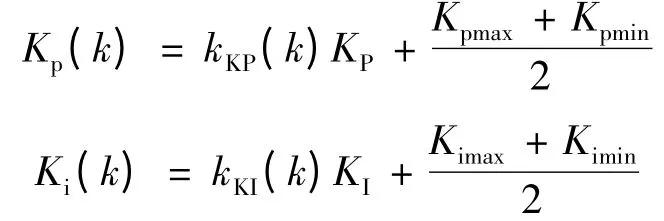
则增量PI 控制器的输出:

1.2 积分分离电流调节
当电机在起动、停止,尤其是大幅度加减速和负载突变时,速度环的输出,即电流设定值与电流反馈值之间都会出现较大的偏差。为避免积分作用降低系统的稳定性,此时应该取消积分的作用。当电流设定值与反馈值接近时就加入积分控制,以达到消除静差提高控制精度的目的。
积分分离控制算法可简单表示:

这里,T 为采样时间,也是电流调节的计算周期。β 是积分项的开关系数,当| e(k)| ≤ξ 时,β = 1,否则β = 0。控制算法的程序流程如图3 所示。
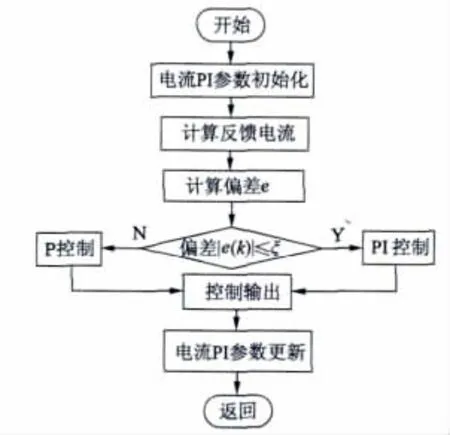
图3 积分分离算法流程图
2 无刷直流电动机控制系统的设计
电动摩托车无刷直流电动机控制系统主要包括:由三相全桥逆变主电路和驱动电路构成的功率驱动单元,以stm8s103 单片机为核心的主控模块,调速把、防盗、串口通信、刹车把、限速及定速巡航构成的人机接口电路,相电流、母线电压采集电路,Hall 转子位置检测电路等。下面将对电路中的主要模块进行设计分析。
2.1 单片机及外围电路
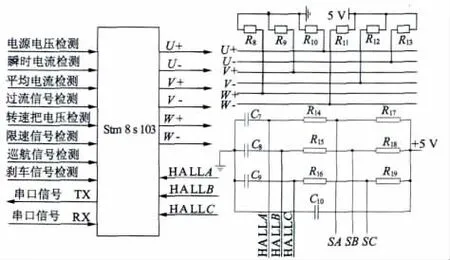
图4 单片机及外围电路
单片机及外围电路如图4 所示,它是系统硬件电路的核心,单片机负责对各路模拟和开关信号进行采集和处理。其中模拟信号包括电源电压、瞬时电流、平均电流、转速把电压等,这些信号都是通过AD 进行采集;开关信号包括过流信号、限速信号、巡航信号和刹车信号等,这些信号都通过单片机的基本输入输出口进行采集。为了监测和调试方便,通过串口和PC 机通信,实时观测系统的各种工作参数,并绘制响应的工作波形。三路漏极开漏的霍尔信号SA、SB 和SC 首先通过上拉,再经过硬件滤波送往单片机进行电机测速测算并计算出转子的位置关系,结合程序处理后的PWM脉宽,输出相应的U、V、W 三相上下桥驱动信号。
2.2 驱动及逆变电路
为了满足电动摩托车的输出额定功率,并留有较大的峰值功率余量,采用12 只功率MOSFEF 75NF75 构成三相逆变桥,每个桥臂由4 个MOSFET构成,且每个桥臂的上下桥均有两个MOSFET 并联。上桥臂的漏极均接在48 V 电压上,下桥臂的源极均通过阻值为5 mΩ 的电流采样电阻R47 和R48。电机的三相绕组A、B 和C 均接在三个桥臂的中间点,且在电机内部呈星型连接。在任意时刻只有两相绕组导通,另一相悬空,因此采样电阻上的电压真实反映了电机内部绕组的电流变化。由于三相桥臂的驱动及逆变电路完全相同,图5 只列出了其中一相的驱动和逆变电路。为了节省成本和电路板面积,将驱动电路和逆变电路集成在一起,并全部采用分立器件设计。为了避免上下桥臂直通短路现象,单片机输出的驱动信号要保证在一个电周期内U+和U-各持续有效时间为120°,且相互间隔60°。从图5 的驱动部分可以看出,U+是高电平有效,U -是低电平有效。即U+为高电平且U-也为高电平时,上桥臂导通,下桥臂截止;U+为低电平且U-也为低电平时,上桥臂截止,下桥臂导通。
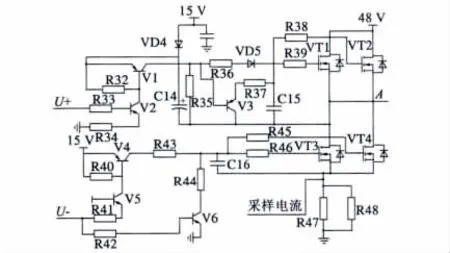
图5 驱动及逆变电路
2.3 电流采集电路
电流采集电路由图6 所示的三个运放电路组成,其中瞬时电流和平均电流的电路结构完全相同,区别仅仅是电容C11 和C12 的不同。C11 的取值通常仅为几百PF 左右,作用是消除电路中的噪声,充分保持电流的动态响应,而C12 的取值一般要在0. 1 μF 以上,对电流起到平均滤波的作用。因而从示波器上可以清晰地看到瞬时电流的脉动波形,而平均电流则呈直线状态。电流采集在整个系统中的作用主要体现在三个方面:一是将平均电流作为电机双闭环控制策略电流内环的输入信号。二是将瞬时电流作为系统的限流信号,对系统的功率进行限制,通过调节平均电流的大小可以限制系统的功率输出,同时也起到一定的保护作用。三是采样电流信号通过设定的比较器后产生的过流信号作为单片机的IO 引脚中断信号,一旦过流信号有效,单片机即进入中断保护,关掉电机,系统进入复位状态。
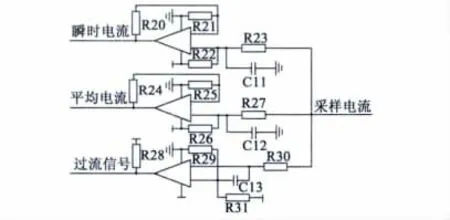
图6 电流采集电路
3 系统实验测试
3.1 系统的软件设计
根据stm8s103 单片机的性能特点,将系统的软件设计分为主程序和中断服务程序两大部分。如图7(a)所示,在主程序部分主要完成系统的初始化,包括CPU 时钟设定,PI 参数初始化,IO 口功能扫描(含巡航、限速)等。因为stm8s103 的AD 具备连续扫描工作模式,且AD 的转换速率高达CPU 主频(16 MHz)的一半,因此将所有需要AD 转换的信号,包括瞬时电流、平均电流、电源电压、转速把电压分别作为AD 转换的四个通道AIN0-AIN3 的输入,一旦设定连续扫描模式后,单片机就自动完成从AIN0 到AIN3 的连续轮询转换,并一直循环下去。各个通道的转换结果都存储在对应的缓冲寄存器里,以方便随时读取,这样就大大简化了AD 转换的程序设计,并提高了软件处理的实时性。在主程序中还要设计与PC 机的串口通信功能,实时监测系统的工作参数。由于双闭环控制算法的复杂性,将这部分重要的功能实现也放在主程序中,最后结合限流条件,产生一定占空比的PWM 波。
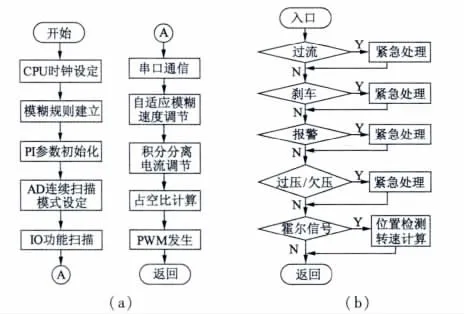
图7 程序流程图
在图7(b)的中断服务程序中完成对系统安全性和实时性要求较高的功能,包括过流、刹车、报警、过压/欠压,这些信号一旦发生立即进行关闭PWM信号输出并关机等紧急处理。还有霍尔信号中断,通过霍尔信号状态完成转子位置的检测和转速计算,为自适应转速模糊调节提供反馈量。
3.2 实验测试
将设计的控制系统应用于电动摩托车专用轮毂电机,电机参数:额定功率800 W,额定转速3 500 r/min,电压48 V,极对数32。将瞬时电流的限流值设定为30 A,这样控制器的输出功率可达到1 400 W 以上,以满足电机的瞬时功率要求。将积分分离的电流阈值ξ 设定为15 A,一旦电流差值大于设定的阈值,就分离积分环节。通过两通道示波器观测到的信号波形如图8 所示,其中图8(a)是单片机输出的某一相驱动信号,其中一通道显示的是作用于下桥臂的电平控制信号,下桥臂显示的是作用于上桥臂的PWM 信号。图8(b)上下显示的是电机两相绕组的相电压,幅值为电源电压48 V,中间显示的是两相绕组的线电压,可见在两相绕组的切换过程中存在反电动势形成的衰减过渡信号。
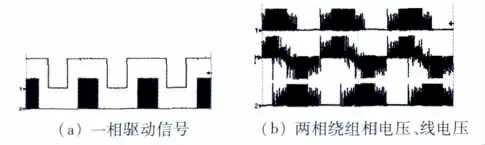
图8 工作波形
上位机可通过串口实时接收系统工作参数,图9 是根据接收的参数画出的电机运行速度和电流曲线。其中图9(a)是电机起动测试波形,电机在约2 s 时快速起动,经过短暂的超调即达到设定的额定速度3 500 r/min,初始起动峰值电流达到24 A,2 s后电流迅速减小。图9(b)是设定转速3 000 r/min带载运行过程中在10~20 s 期间负载突变的测试波形,可见虽然电流变化较大,但速度变化仍较平缓。
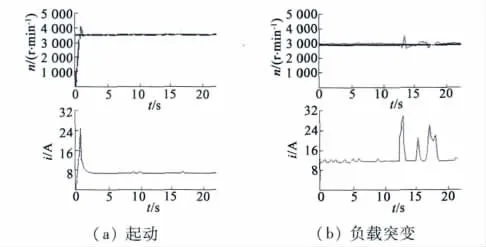
图9 速度电流曲线
4 结 语
本系统硬件除了高性能stm8s103 单片机和常用运放外,全部采用分立器件构成,控制器具有较高的性价比。实验测试表明,控制器输出的信号平滑且稳定,抗噪性能好,抗负载扰动能力强,系统具有较强的可靠性和稳定性。目前该控制器已经过大量的室外各种环境测试,并进入批量试制阶段。
[1] 王灿,马瑞卿,李玲娟,等.电动摩托车用无刷直流电动机控制器设计[J].微特电机,2007,35(3):25-27.
[2] 余安富,于平,李先锋,等.基于TMS320F28335 的无刷直流电动机调速系统设计[J].仪表技术与传感器,2011,(9):102 -104.
[3] 李春峰.基于BP 神经网络无刷直流电动机换相转矩脉动抑制方法的研究[J].长春大学学报,2012,22(10):1181-1185.
[4] 黄元峰,王海峰.基于滑模变结构控制算法的无刷直流电动机力矩平衡控制系统研究[J].电机与控制应用,2012,39(2):9 -11.
[5] 代睿,曹龙汉,何俊强,等.基于微粒群算法的无刷直流电机单神经元自适应控制[J].电工技术学报,2011,26(4):57-63.
猜你喜欢
疯狂英语·新悦读(2022年7期)2022-11-23
煤气与热力(2021年12期)2022-01-19
北京第二外国语学院学报(2021年2期)2021-08-13
北方人(2021年13期)2021-07-17
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
共产党员(辽宁)(2015年6期)2015-06-07
筑路机械与施工机械化(2014年4期)2014-03-01
