图像边缘提取的区域联合分割与主动轮廓模型
2013-11-12 08:39李富栋
激光与红外 2013年1期
高 颂,李富栋
(空军驻锦州地区军事代表室,辽宁锦州121000)
1 引言
图像边缘是图像的一个属性区域和另一个属性区域的交界处,是区域属性发生突变的地方(如方向、阶跃性质、形状等)。边缘检测是图像分割、目标区域识别、区域形状提取等图像分析方法的基础。在目标的识别与跟踪处理中,目标图像的边缘提取是一项关键技术。本文就图像的边缘特性、边缘和区域的联合分割、主动轮廓算法等,作进一步的研究和探讨[1]。
2 图像的边缘特性
图像的边缘特性是沿着边缘走向的切向方向的像素灰度值变化比较平缓,而沿着边缘法向方向的像素灰度值变化会表现得很剧烈。所以找出符合边缘特性的像素的微分算子也就找到了提取边缘的合适的算法[2]。
图1是几个包含典型细节的简单图像。从图中可以看出,当画面由亮变暗逐渐变化时,其灰度的变化是斜坡的;一般来说,不时出现的孤立点就是噪声,出现孤立点时,可以看到其灰度的变化是一个突起的尖峰;如果进入平缓均匀变化的区域,那么其灰度变化为一条直线;如果出现一条细线,则其灰度变化是一个比孤立点略显平缓的尖峰;当画面由黑突然变到亮时,其灰度变化是一个阶跃。
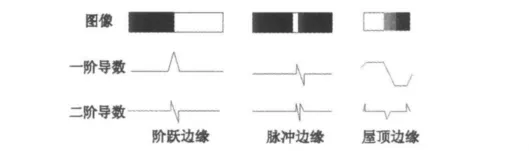
图1 图像的边缘特性
从导数含义来看,“一阶导数”是描述“数据的变化率”,“二阶导数”是描述“数据变化率的快慢”。对于图像细节变化的描述,或者说检测,都可以通过一阶或者二阶导数来实现。
3 边缘和区域的联合分割
由于噪声等影响,基于边缘的分割算法分割得到的图像边缘往往不连续,需要进一步进行边缘连接处理;为了克服图像分割空间不连续的缺点,基于区域的分割算法得到了一定范围的应用,但由于阈值的选择常常不甚合理,会造成对图像的过度分割。而联合分割算法是充分利用了图像的边缘和区域两方面的信息,将两种算法的优点充分加以利用,从而提高图像分割的总体效能[3]。
例如,Otsu的区域分割方法。Otsu方法即最大类间方差阈值选择法,应用于图像直方图有双峰但无明显波谷或双峰和波谷都不明显的情况,最佳阈值选取类间方差最大的灰度值,以得到较好的分割效果。
设一幅图像的灰度范围为[0,L-1],对应灰度级i的像素数为ni,则总像素数,各像素值的概率pi=ni/n。把图像中的像素按灰度值用阈值T分成C1和C2两类,C1由灰度值在[0T]范围内的像素点组成,C2由灰度值在[T+1L-1]范围内的像素点组成。
C1对应的概率和均值为:

C2对应的概率和均值为:

整幅图像的均值为:

类间方差为:

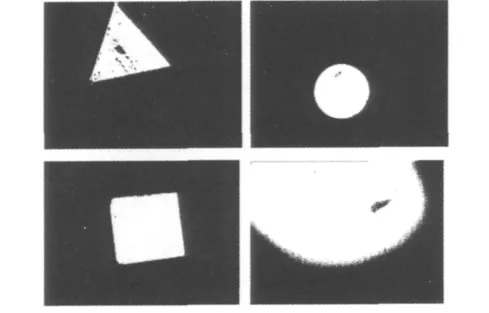
图2 Otsu分割结果
从图2可看出基于Otsu的单阈值分割结果,基本上可以正确得到目标,但对于椭球体产生了过分割现象。
4 主动轮廓模型
主动轮廓模型线就是一个二维变形曲线,只不过该曲线的变形行为被内部力和外部力所规范,使其在总能量一定的情况下进行演化,内部力约束了该曲线形变的连续性和平滑性,外部力用来牵引该曲线向着待处理图像的特征边缘逼近。通过对能量函数的最小化,轮廓线在内、外力的共同作用下,完成了向待处理图像的目标边缘的演化任务。能够把对图像的先验知识和人机交互融入到主动轮廓线的演化过程,这一点是利用该方法进行图像分割的最根本的好处,这样,不难理解图像分割结果的准确性将会得到大大的提高[4]。
4.1 分 类
因为主动轮廓模型算法所特有的优越性,它自从Snake模型被提出以来,改进的模型和算法不断地涌现。在这里把该模型依其曲线表示方法的不同分成为三个主要类别:
(1)基于离散点的主动轮廓模型。预先设定的二维曲线是采用有序离散点集来表示的,也把点集中的元素称呼为控制点或者蛇点。当该模型应用在极坐标系下时,也被称为主动射线。但对极坐标形式的模型应用的不多,因此对直角坐标系下的表达式进行介绍。
(2)参数化主动轮廓模型。模型中采用的参数是用基本函数来表示的。一些常见的曲线,如B样条曲线、Fourier展开式等函数常在这里被用作基本函数。
(3)几何主动轮廓模型。在该模型中的平面曲线是用一个二维的曲面水平集来表示的。
从分类描述上来看,基于点的主动轮廓模型可以看做是参数化主动轮廓模型的特例情况,而且随着基函数个数的增加,两者可以近似地看成一个模型。
4.2 数学描述
该模型的数学描述如下所示:

从前面的论述可以知道,整个图像处理的过程就是通过求能量函数Esnake的最小值过程,这样迫使轮廓曲线向能量降低的方向进行演化。从参数域s∈[0,1)到图像表面曲线的映射是由函数C(s)=C(x(s),y(s))来表示的。式(5)中Eint是由内部力产生的能量,用来维持演化曲线的连续性和平滑性,它在这里被定义为:

曲线对空间参数的一阶导数和二阶导数都包含在该能量函数中。其中,一阶导数部分体现了轮廓线的弹性,二阶导数部分体现了轮廓线的刚性,弹性和刚性在内部能量中的比重由系数α(s),β(s)来调节。特殊的,当α(s)=0时,表明曲线在该点处是断开的;当β(s)=0时,表明曲线在该点处可能是一个角点。
在式(5)中,Eext是由外部力产生的能量函数,在这里对它这样定义:

在式(7)中,Eimage是由图像力产生的能量,Econ是由约束力产生的能量。目标轮廓等图像特征是用图像能量Eimage来表示,它的分量写成以下形式:

在式(8)中,把Eline称为线能量,把Eedge称为边缘能量,把Eterm称为端点能量;再用wline,wedge,wterm分别来表示各项的加权值,这个权值起到调节各项比重的作用。在Kass等人所构建的Snake模型中,wline,wedge,wterm分别被定义为:

在式(11)中,I(x,y)为原图像I(x,y)的梯度,g(x,y)为经过平滑处理过的图像[4]。
4.3 C-V模型图像分割方法
随着主动轮廓模型的进一步发展,出现了CV模型图像分割方法:待处理图像中每个同质区域的亮度被假设为常数,那么把上述的能量函数进行最小化运算的目的,就是要探索一个能使得分割得到的图像和原图像之间的相似性达到最大的最优化分。
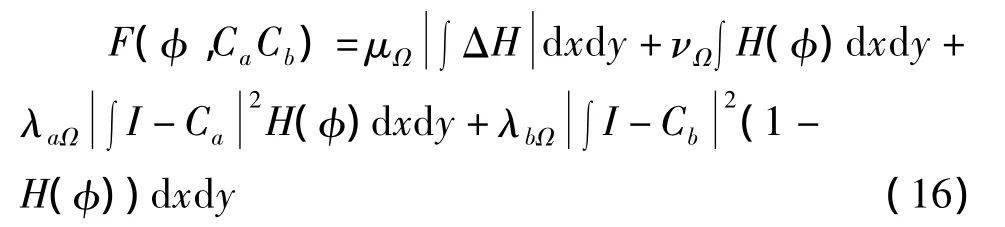
首先令待处理图像被演化曲线分成了目标和背景两个独立区域,那么C-V模型的能量函数表达式可以这样来描述:


对于轮廓线C位于两个不同质区域时,F(C)不能达到最小值。所以又提出了另一个图像分割的能量函数,表达式为:

在式(13)中,闭合轮廓线的长度用L(C)来表示,C的内部区域面积用S0(C)来表示,μ,ν≥0,λ是权重系数。通过对上述表达式进行最优化处理,得到了最优的图像分割效果。可以依据初始的轮廓曲线C0构造出水平集函数,表示为。有:

从上述的论述可以知道,图像函数I(x,y),以及轮廓曲线Ca,Cb都是具有全局特性的参数变量,从此分析可以看出,C-V模型图像分割方法的一个显著特点就是着眼全局,全面优化。
4.4 C-V模型仿真分析
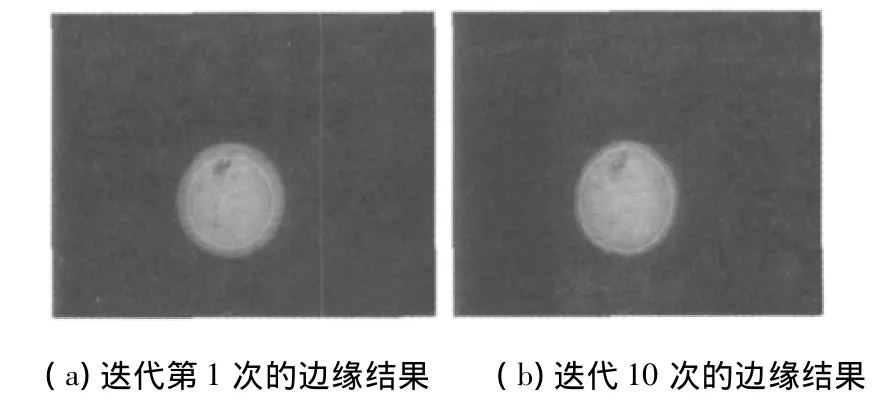
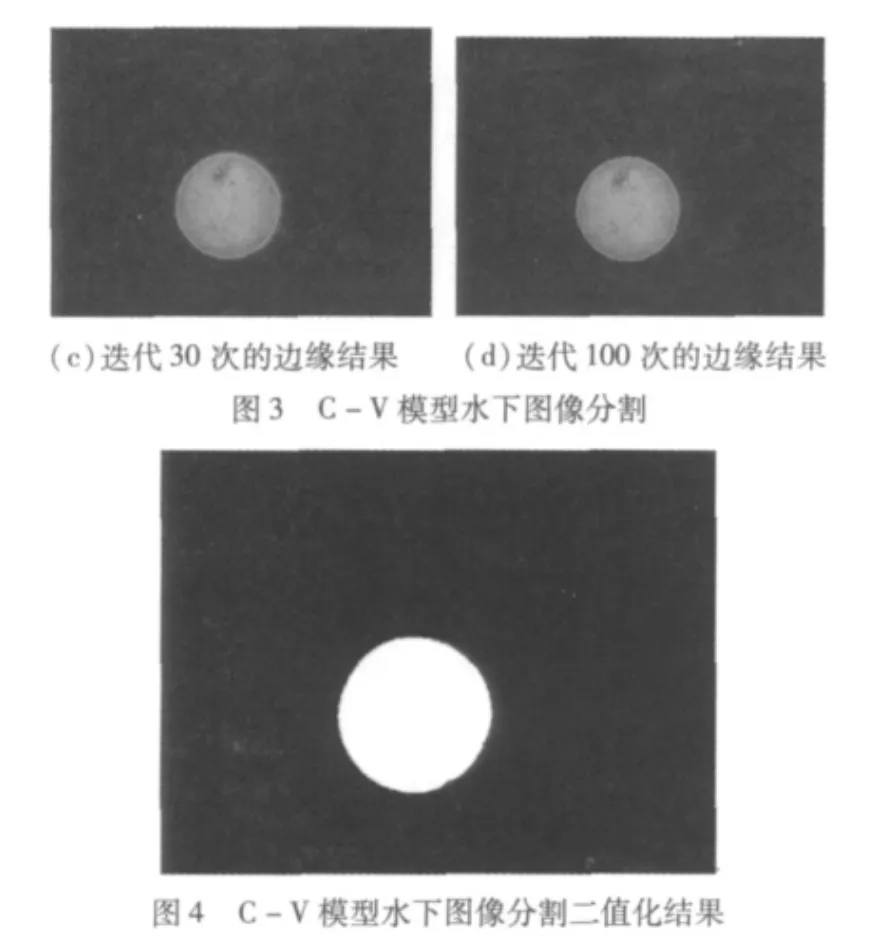
图3分别给出了利用C-V模型图像处理方法对水下目标图像球体进行不同次数的迭代所得到的结果,从中可以清晰地看到轮廓曲线随着迭代次数的增加逐渐逼近待检测图像的边缘的过程。经过100次迭代运算后,轮廓已经很好地逼近球体边缘。但C-V模型的分隔算法与初始轮廓关系较大,而初始轮廓的选择问题是C-V模型应用于水下图像分割的关键问题。同时可以看出,在分割过程中出现了小的空洞,可以通过二值化后面积标记的算法进一步去除分割过程中出现的小空洞。最终得到分割结果,如图4所示。
5 结束语
采用边缘和区域的联合分割和主动轮廓算法C-V模型算法,而C-V模型更适用于水下的球体、椭球体边缘检测,具有提取的边缘连续的优点。当然,在处理不同的实际问题时,针对环境条件和要求的不同,可以选择适合的算子进行图像边缘提取[5]。
[1] Li Xiaomao,Tang Yandong,Min Li.Elliptic object detection based on shape preserving and active contour[J].Opto-Electronic Engineering,2008,35(2):79 -84.(in Chinese)
李小毛,唐延东,闵莉.基于形状保持主动轮廓的椭圆状目标检测[J].光电工程,2008,35(2):79-84.
[2] Li Xiaomao,Wang Zhifeng,Tang Yandong.Long straight bar detection based on shape preserving active contour model[J].Computer Engineering,2008,34(1):53 - 55,58.(in Chinese)
李小毛,王智峰,唐延东.基于形状保持主动轮廓模型长直条的检测[J].计算机工程,2008,34(1):53 -55,58.
[3] Luo Honggen,Zhu Limin,Ding Han.A survey on image segmentation using active contour and level set method[J].Journal of Image and Graphics,2006,11(3):301 -308.(in Chinese)
罗红根,朱利民,丁汉.基于主动轮廓模型和水平集方法的图像分割技术[J].中国图象图形学报,2006,11(3):301-308.
[4] Wu Jiming,Zhu Xuefeng,Xiong Jianwen,et al.A fast active contourmodel for image segmentanon driven by local region energy[J].Journal of Optoelectronics· Laser,2010,(1):140 -143.(in Chinese)
吴继明,朱学峰,熊建文,等.图像分割中局部能量驱动的快速主动轮廓模型[J].光电子·激光,2010(01):140-143.
[5] Zhang Kaihua,Zhou Wengang,Zhang Zhen,et al.Improved C - V active contour model[J].Opto-Electronic Engineering,2008(12):112 -116.(in Chinese)
张开华,周文罡,张振,等.一种改进的C-V主动轮廓模型[J].光电工程,2008(12):112-116.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
高技术通讯(2021年3期)2021-06-09
装备制造技术(2020年1期)2020-12-25
制造技术与机床(2019年11期)2019-12-04
中国交通信息化(2017年4期)2017-06-06
自动化学报(2017年5期)2017-05-14
通信产业报(2016年44期)2017-03-13
光学精密工程(2016年1期)2016-11-07
舒适广告(2008年9期)2008-09-22
雕塑(1999年2期)1999-06-28