
微型SAR实时信号处理和控制系统一体化设计
2013-11-10 05:37竺红伟雍延梅
中国电子科学研究院学报 2013年2期
竺红伟,雍延梅
(中国电子科技集团公司第38研究所,合肥 230088)
0 引言
无人驾驶侦察飞机由于以其高效能、高机动、低成本、零伤亡等优势,已广泛应用于军事、民用多个领域。机载传统的光学传感器的应用已很成熟,但存在受气象条件与光照条件的制约,合成孔径雷达(SAR,synthetic aperture radar)可以在能见度极差的气象条件下,获得类似于光学照相的高分辨率地面目标图像,可全天时、全天候工作,已经成为一种得到普遍重视的传感器[1]。近年来,无人机载SAR由于在战场监视、敌情侦察和精确打击等方面表现出色,已成为世界各国发展无人机侦察装备的重要方向[2]。而体积小、重量轻、对系统要求低的微小型SAR系统,可装载于微型无人机上,用于边境突防侦察、智能侦察,甚至可批量装备与导弹上,具有广阔的应用前景。
实时处理系统可以在飞机飞行的过程中,利用硬件设备和成像算法对原始回波进行处理,连续实时成像,得到SAR图像,并利用图像压缩技术进行压缩,并通过无线链路下传到地面情报处理系统,可以达到实时监测、及时了解无人机飞行状况并寻找感兴趣目标(区域)进行相应处理。
1 系统组成
1.1 处理芯片选择
在成像实时处理硬件设计中,处理芯片的选择是其中的关键。由于合成孔径雷达的数据率高,数据量大,存储时间长,这就要求有很大的存储容量和很高的运算速度,尤其是大点数的FFT计算占了相当大比例。在现代工程实际中,DSP和FPGA为信号处理主要器件,其中采用DSP技术具有灵活性强、开发周期短,以及系统维护修改方便的特点,而大规模FPGA实现技术具有处理速度快、环境适应性强等特点,但是灵活性相对较差。一般来说,用FPGA的实现方法对简单和规则的运算来说有很高效率,特别时对于高密度的FFT运算有很高的效率。DSP在任务控制,处理复杂算法上有着巨大的优势,这得益于DSP在一开始设计时就在指令执行、寻址方式、指令流控制、外设接口等方面都针对数字信号处理作了优化。但由于内部乘法器的限制,在处理像高密度的FFT运算时候效率相对FPGA较低。表1为ADI公司的TS101、TS201和FPGA做FFT运算时间对比[3]。
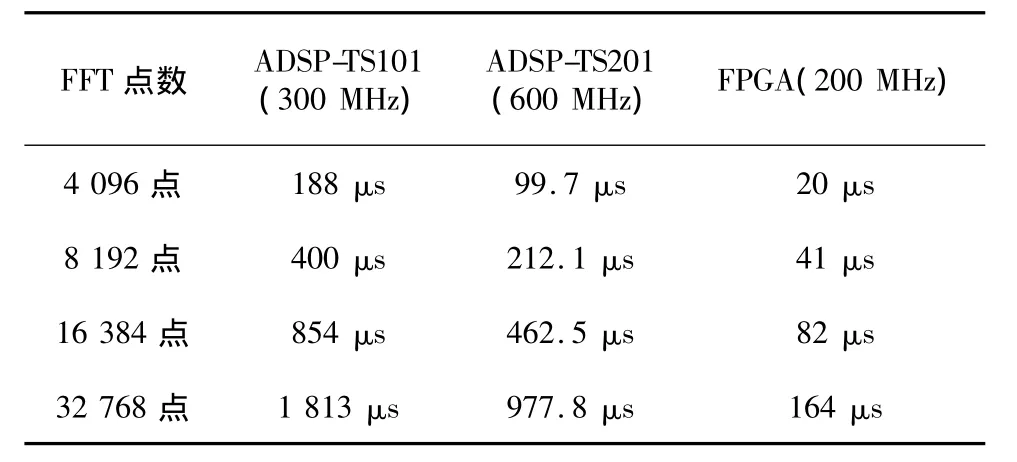
表1 DSP和FPGA FFT计算时间对比
综合考虑FPGA和DSP的特点,微型SAR实时信号处理采用FPGA和DSP混合处理的方式,DSP作为主处理器,主要实现整个程序的流程控制和运算一些算法相对复杂但是运算量不大的计算,比如Fdc估计、Fdr估计等,而FPGA主要实现距离向、方位向的大量FFT和IFFT运算,这样使得整个系统的处理效率大大提高。
目前信号处理主流的DSP芯片有ADI公司Tiger SHARC系列的 ADSP-TS101、ADSP-TS201芯片和TI公司的C6x系列DSP,相比于C6x系列DSP,ADSP-TS101和ADSP-TS201在浮点处理更具优势,更适用于雷达信号处理。ADSP-TS201相比ADSPTS101的具有更强的处理能力,但是其功耗较大,约为ADSP-TS101的2倍。在SAR信号处理中,DSP外部存储器和内部缓存有大量的数据吞吐,通信带宽往往是制约整体性能的主要因素,而ADSP-TS101具有更佳带宽性能比。且微型SAR系统对功耗、重量有很大的限制,故系统设计采用ADSP-TS101芯片。在FPGA芯片的选择中,目前Altera公司的EP3S系列的芯片很大的片内存储资源和相对多的DSP Block,其中我们已经应用过的EP3S110有9300多K的内存和多达896个18×18的DSP Block,非常适合做高密度的FFT运算。
2.2 系统架构
传统的实时处理系统中,利用多块板卡并行处理实现连续实时成像,单块板卡上利用多个DSP实现对子孔径数据的并行处理以提高性能,而无人机载微型SAR系统对体积、功耗、重量有很大的限制,不允许做传统的多板卡并行处理。从表1可见,FPGA相对于DSP在FFT运算中很大的优势,以FPGA工作在200 MHZ主频为例,其处理能力可达ADSPTS201的4~5倍;而在SAR实时处理中FFT运算占整个处理时间的80%以上,采用FPGA实现FFT运算能够很大程度上减少处理芯片的数量和规模;并利用FPGA和ADSP-TS101混合处理方式,充分发挥了各自处理优势。传统的控制系统中,往往利用CPU或者单片机实现一定的计算功能,利用CPLD或者FPGA实现接口控制和时序设计。而在本系统中,利用FPGA内嵌的NIOS实现了计算功能,单片FPGA实现了整个系统控制功能,实现了实时信号处理和控制系统一体化设计,减小了系统体积、重量和功耗,而且处理和控制系统的这种无缝设计,降低了接口的复杂度,提高了系统的可靠性;相比于SRAM和SDRAM,采用DDRII存储方案大大提高了数据通信带宽,减小了数据吞吐延时。整个系统设计大大提高了处理性能,有效的降低了体积、重量和功耗,很好的满足微型SAR系统要求。系统硬件框图如图1所示。
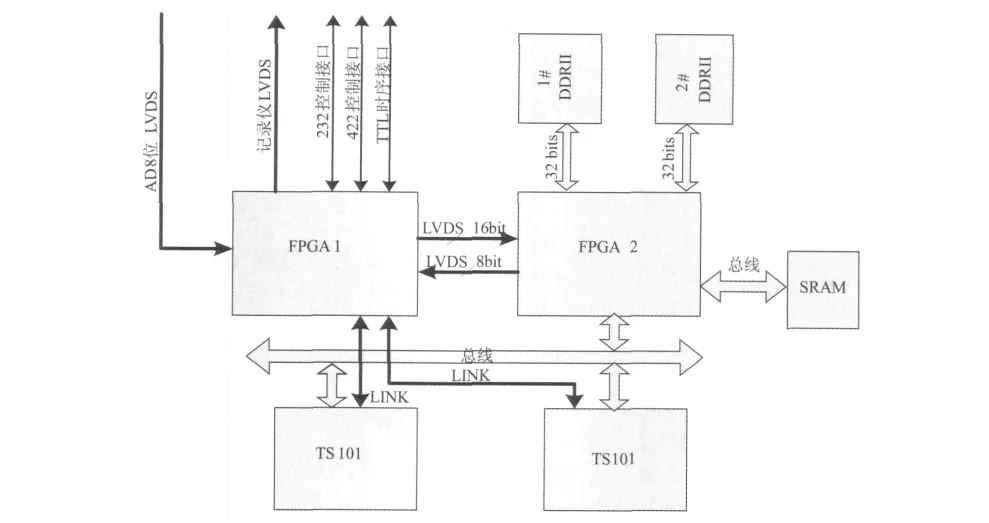
图1 系统硬件框图
系统的控制功能主要由FPGA1(EP3SE110F1152)实现,内部接口种类和数量多,FPGA逻辑设计异常复杂。a)产生整机时序,包括导前、DDS触发、波形控制码、工作模式码、AGC增益控制等,并根据系统工作命令动态更新。b)接收并解译显控系统通过232串口发送工作命令和系统参数,对信号处理、伺服、接收等分系统进行控制,同时将其他系统的工作状态反馈到显控;c)接收AD采集系统通过LVDS接口发送的原始数据,接收并解译载机的惯导数据,并根据数据协议对原始回波、惯导数据和系统工作参数进行打包处理,同时发给信号处理系统进行处理;d)通过232串口发送命令协议对记录仪进行工作起始、停止控制,将打包后的原始数据发送到记录仪进行存储;e)实现整机的BITE设计,采用看门狗的方式对信号处理的ADSP-TS101和FPGA主要功能模块进行状态监测,利用TTL电平信号对接收、伺服系统的工作状态进行监测,并将各个分系统的状态上报到显控系统进行显示。
在脉冲重复周期内,FPGA1完成距离脉压,并根据场景宽度进行数据截取,有效地降低了数据率,并将处理结果通过LVDS接口传给FPGA2,后续的处理功能主要有两片 ADSP-TS101和FPGA2(EP3SE110F1152)共同实现。信号处理板上有两片ADSP-TS101实现乒乓处理,主频为300 MHZ,外围32位地址总线和64位总线和FPGA2相连,总线时钟75 MHz,每片通信带宽为600 MBps。每片的4个链路口和FPGA相连,通信带宽为600 MBps,实现和FPGA的数据交互。TS101实现了整个处理流程的控制,实现了Fdc、Fdr估计等运算,并对图像进行压缩,将压缩后的图像数据通过链路口转发给FPGA1,传到载机无线传输链路,最终下传到地面情报系统。FPGA2内部有两个处理核,主要实现大点数的FFT以及IFFT处理,FPGA2外挂两组32位宽度的DDRII存储器,每簇容量为256 MB,用于处理过程的数据缓冲,通过自带的IP核实现对DDRII的访问,时钟频率为533 MHz,峰值数据率可达2.1 GBPS,满足了处理过程中大带宽数据吞吐的要求。FPGA2的程序处理进程由TS101来触发,协同ADSPTS101共同完成整个实时处理流程 。系统的硬件实物,如图2所示。
图2 系统硬件实物图
2 算法选择
在所有的成像算法中,RD算法是相对比较成熟的一种。与CS算法相比,它具有较小的运算量还可以在收数的同时完成实时距离脉压处理并进行数据截取,这就大大减小了数据量,缩短了处理时间[4]。在实际情况中,无人机载SAR由于气流不稳定的影响,运动的不稳定性较大,如果不采取运动补偿,则所录取的数据受到不稳定因素的影响会有较大的失真,从而使成像质量下降,因此需要在成像算法中嵌入运动补偿部分。首先利用无人机提供的惯导数据对运动误差进行了初补偿,消除了大部分的运动误差;在后续的处理中,又利用回波数据进行运动误差估计与补偿,进一步消除了运动误差。这种利用惯导数据计算运动误差与回波数据估计运动误差相结合的算法,充分发挥了两种方法的优点,增加了系统的可靠性[2]。基于以上分析,采用了一种改进型的RD算法,且整个算法结构非常适合实时处理流程。
机载SAR侧视成像几何关系,如图3所示。
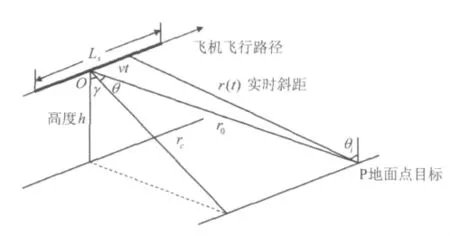
图3 机载侧视SAR成像几何关系图
其中Ls为子孔径长度,v为载机飞行速度,r(t)为地面点目标P到雷达的实时斜距,r0为P点到子孔径中心点的距离,rc为P点到载机航迹的垂直距离,斜视角θ为P点到子孔径中心O的连线与载机航线夹角的余角,θi为雷达入射波束中心线与地面法线方向的夹角,γ为波束中心线扫描平面与载机航迹所在垂直平面的夹角,h为载机高度。
点目标P的回波特性取决于实时斜距r(t)。由余弦定理


由此引起的多普勒频率为
可见,由于雷达运动,地面单个点目标的回波信号所产生的多普勒频移近似具有线性调频特性。多普勒中心频率

方位调频率

输出信号的时域表达式为

从上式第一项可以看出t和τ的耦合,同一距离不同方位上的点目标距离迁移轨迹相互重叠,无法在时域对各点的距离迁移得到统一校正。
sinc函数中t的一次项代表距离走动,必须对其进行校正。若令的傅里叶变换为 Sr1(f),则对应的傅里叶变换为

为校正距离走动,可将距离向频谱乘以一个补偿因子Φ1

多普勒中心频率fdc必须从实测数据进行估计,sinc函数中的t2项代表距离弯曲。在本试验中,由于测绘带较小,子孔径长度也不大,成像区域内散射点的最大距离弯曲不会超过一个距离分辨单元,距离弯曲的影响可以忽略。方位向处理时也必须对fdc进行补偿,否则可能使方位多普勒频率产生模糊,导致最终的SAR图像出现折叠。方位多普勒中心频率补偿因子为

方位向处理首先采用补偿因子Φ3在时域进行去斜(Dechirp)

fdr也是从实测数据进行估计的。最后方位向完成脉压就能得到复图像输出。
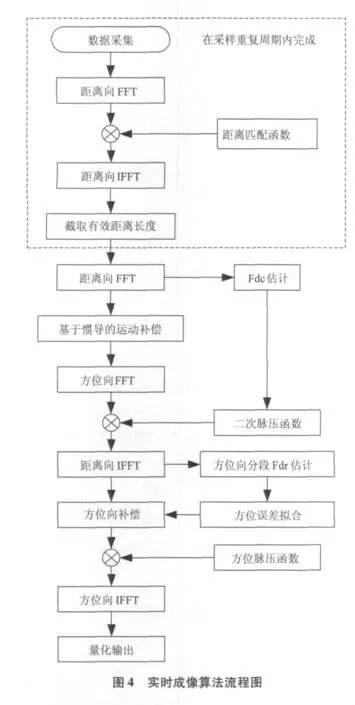
算法的详细流程如图4所示。
4 试验结果
基于上述硬件平台和成像算法,微型SAR实时信号处理系统随雷达整机在2011年下半年进行了飞行试验,利用中国电子科技集团公司第27所的“天鹰-I”无人机平台在河南郑州上街机场进行了挂载飞行试验,在多个架次的飞行试验中,微型SAR信号处理系统工作稳定、可靠,实现了连续实时成像处理和雷达整机的控制功能,很好的适应了微型SAR系统的需求。所得的实时图像如图5和图6所示。

[1]保铮,刑孟道,王彤.雷达成像技术[M]北京:电子工业出版社,2005.
[2]郝慧军,唐月生.SAR实时成像处理系统设计[C]//第十二届雷达年会论文集,2012:1 323-1 327.
[3]Analog Device Inc.ADSP-TS101 TigerSHARC Processor Hardware Reference[Z].2003.
[4]方志红,张长耀,邓海涛,等.直升机载SAR实时处理的实现[C]//2003年中国合成孔径雷达会议论文集,2003:256-256.
猜你喜欢
航天电子对抗(2022年4期)2022-10-24
——信号处理
无线电工程(2022年10期)2022-10-24
南京航空航天大学学报(2022年2期)2022-04-27
中学生数理化(高中版.高考数学)(2022年1期)2022-04-26
潍坊学院学报(2021年2期)2021-07-22
数学小灵通(1-2年级)(2020年6期)2020-06-24
电子制作(2019年14期)2019-08-20
制导与引信(2017年3期)2017-11-02
中学生数理化·八年级数学人教版(2017年2期)2017-03-25
火控雷达技术(2016年2期)2016-02-06
