弹道中段雷达目标识别研究进展综述
2013-11-10 05:37:02冯德军
中国电子科学研究院学报 2013年2期
冯德军,王 博,王 伟
(电子信息系统复杂电磁环境效应国家重点实验室,国防科技大学,长沙 410073)
0 引言
弹道导弹的飞行过程包括助推段、中段和再入段,其中中段是飞行时间最长的阶段,也是反导拦截的关键阶段[1,2]。由于缺乏大气的过滤作用,中段真假目标识别成为反导系统的瓶颈问题。1999年,美国情报部门提交的美国受到弹道导弹威胁的《国家情报评估》报告指出:“我们的评价认为,研制弹道导弹的国家也将研制各种措施来对抗导弹防御系统,很多国家在开始时将采用容易获得的技术,包括分离弹头、旋转稳定弹头、弹头重新定向、雷达吸波材料、助推器破片、小功率干扰机、箔条和简易诱饵”[2]。突防目标群的复杂化使识别环境变得更为恶劣,增加了识别难度。美国导弹防御局的Cooper承认:“导弹防御的关键问题是,能否成功地从气球诱饵和其他突防装置中识别出真弹头。这是一个非常棘手的问题,它已经困扰了防御者30年”。
不论是哪类假目标,它们总在某个特征层面上与真实弹头存在着一定的差别,因此识别出真假目标是可能的。在理论上,能够用于识别真假弹道目标的特性主要有三个:一是目标的尺寸和形状;二是目标的温度,三是目标的运动状态[3]。导弹防御系统主要通过雷达和红外系统来感知真假目标的特性差异,其中雷达是中段目标识别的主要传感器。
雷达目标识别的基本途径是从目标的后向电磁散射中提取目标的结构特征和运动特征,再根据一定的先验信息来辨别真伪。结构特征包括目标的尺寸、形状、材料等,是鉴别真假目标的直观属性;运动特征包括宏观弹道特征和微运动特征,它们从不同侧面反映了目标的本质属性。基于此,将弹道中段的雷达目标识别方法分为基于结构特征的识别方法、基于弹道特征的识别方法和基于微动特征的识别方法,并分析了它们各自的特点。
1 弹道中段识别环境及识别特点

图1 弹道中段的识别环境
在推进系统关机后,弹道目标进入中段飞行。随着时间的推移,中段目标群的构成逐渐复杂,通常包括如下几类目标群:第一类是发射碎片,主要包括助推火箭、帮助再入飞行器脱离母舱的弹簧、各种爆炸螺栓部件等;第二类是假目标和诱饵,主要有涂有金属的气球、轻型充气或刚性的复制诱饵,另外还有与再入飞行器的红外特性非常相似的红外热源及箔条等;第三类是真实的弹头,包括单弹头,也可能是多弹头。第四类是主动干扰机,以产生虚假的回波信号。弹道中段雷达目标识别面临的环境[4]如图1所示。
由图1可以看出,中段目标群的构成是非常复杂的,这增加了识别的难度。另一方面,反导目标识别是典型的非合作目标识别,与其他识别场景(如字符识别、语音识别、人脸识别)相比,它主要有如下三个特点[5]。
一是对识别的准确率要求高。无论是以真为假还是以假为真,其代价均相当高。因此,防御方对弹道目标识别的准确程度要求苛刻。
二是识别先验信息缺乏。由于识别对象(弹头、诱饵)的特殊军事地位,一般无法获得待识别对象的特征数据库,只能根据粗略的先验知识进行识别,这是弹道目标棘手的主要原因。
三是识别实时性要求强。弹道中段的飞行时间虽然长,但反导系统的识别窗口和拦截窗口却十分有限,在有限的时间内,雷达要完成目标识别、威胁评估、目标引导、杀伤效果评估等一系列工作,识别系统必须反应迅速。
中段目标识别的以上特点决定了在分类器设计和特征提取方面都有自己独特的要求。在分类算法方面,由于先验信息缺乏,无法采用模板匹配这一类的方法,而只能采用专家系统等方法;考虑到实时性的要求,分类器还应当简洁、稳健、高效。由于这些限制,许多经典而成熟的分类识别算法,如贝叶斯分类器等难以直接应用于反导目标识别。此外,那些对学习训练要求苛刻、计算繁琐、推广能力较差的识别方法(如神经网络方法,当识别条件改变时往往要重新训练)也不太适应反导目标识别的要求。
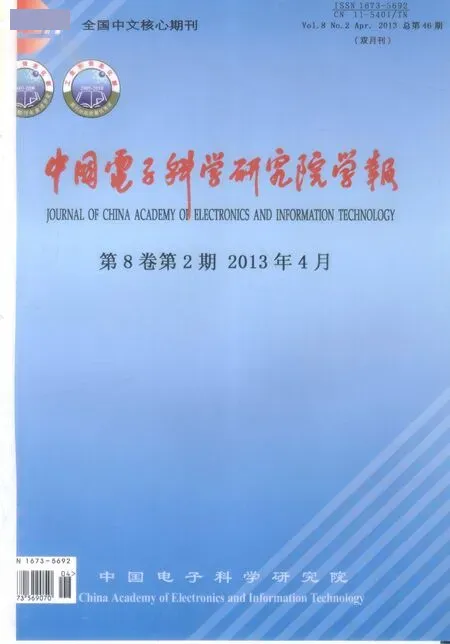
在特征的提取方面,目标识别雷达必须提取出那些能够反映出真假目标本质差异的特征量才能用于识别。对特征量的要求主要有两个,一是具备良好的可分性,二是物理意义清晰。前者是特征提取的共同要求,而后者是在先验信息缺乏条件下的特定要求。在反导系统发展的不同历史阶段,尽管受技术条件的限制,所提取的特征各不相同,但均反映了以上两个要求。以美国的导弹防御系统为例,在反导系统建设初期,所采用的是窄带雷达系统,所提取的特征主要是目标的雷达散射截面(RCS,radar cross section)和弹道系数;随着宽带技术和极化测量技术的发展,雷达获取目标精细结构信息的能力大为提高。美国弹道目标识别发展过程中涉及的雷达技术以及用到的识别特征量[6,7],见表1。
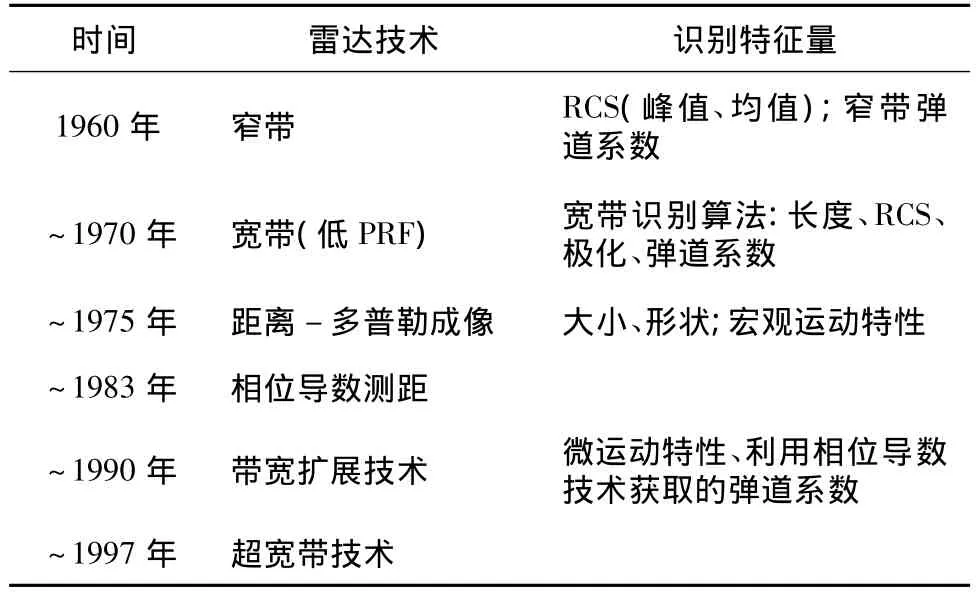
表1 美国弹道导弹目标识别技术发展历史
由表1可看出,尽管不同时期所采用的特征提取技术不同,但所提取的特征概括起来可以粗分为三类,即结构特征、弹道特征和微运动特征。下面分别介绍基于这些特征的识别方法。
2 基于结构特征的识别方法
雷达目标对入射信号进行特性调制,由于外形尺寸、散射中心分布等结构上的差异,雷达目标特性存在较大的差别。根据雷达提取目标结构特征所采用的信号形式、提取特征等方面的不同,又可进一步分为基于RCS序列的识别方法、基于HRRP的识别方法、基于ISAR图像的识别方法和基于极化信息的识别方法。
2.1 基于RCS序列的结构特征提取与识别
RCS是反映目标对雷达信号散射能力的度量指标。通常情况下,弹道目标沿弹道运动将引起姿态相对于雷达视线发生变化,雷达可获得RCS随视角(姿态角)起伏变化的数据,其中的变化规律反映了目标形体结构的物理特性。在20世纪七八十年代研究者就意识到了RCS序列包含的目标结构特征,并进行了较深入的研究;Thomas明确指出,采用该方法可以区分母舱和弹头[8];在文献[9]中,Lambour采用该方法对空间碎片进行分类,获得了满意的结果。该文所采用的空间目标尺寸估计模型曲线如图2所示。
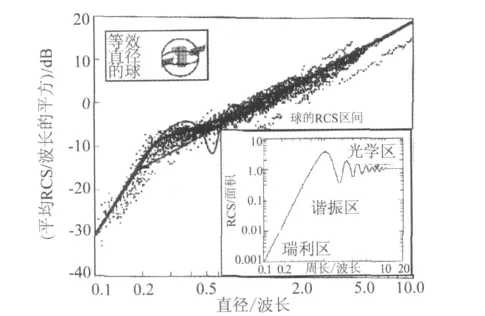
图2 基于RCS的空间目标尺寸估计模型曲线
2.2 基于HRRP的结构特征提取与识别
由于尺寸、形状的差异,弹头和诱饵呈现不同的结构特征,反映在HRRP上,体现为其HRRP所具有的散射中心在空间分布数量、位置、强度等方面存在明显的差异。因此,根据目标的HRRP识别真假是一种有效的方法。在文献[10]中,Clark对这一方法进行了详细的阐述,说明了基于HRRP的特征提取方法。直径为2.2 m的球形诱饵与某真实弹头的外形及HRRP如图3所示。由图3可看出,它们的散射特性相差很大。

图3 球形诱饵与真实弹头结构特征对比
另外一种有效的基于HRRP的识别方法是在HRRP的基础上进行二次特征提取,提取目标的长度、长度变化幅度和周期等物理意义清晰的特征量。目标的长度信息是真假目标鉴别最直观、最重要依据之一。真假目标的长度存在差别:弹头长度大多在1~3 m之间,母舱的长度一般大于弹头,简单转发式有源诱饵往往只能形成单个尖峰,其长度很小,碎片的长度一般也小于弹头长度。因此,采用长度信息识别目标是国内外研究者公认的有效手段[11]。但由于噪声和其他因素的影响,获取目标的长度信息并非易事:目标只占据距离像中的一部分,而雷达通常难以区分目标和噪声的分界点,另外,目标的长度与其姿态密切相关,而估计目标姿态是一件困难的事情。
2.3 基于ISAR的结构特征提取与识别
ISAR通过纵向和横向的二维压缩,可以获得目标散射中心的二维分布,因而能观测到目标结构上的微小细节,为真假目标鉴别提供更丰富的信息。据称,美国导弹防御系统中的地基目标识别雷达可能采用了该项技术。需要指出的是,要在中段实现对弹头ISAR成像和识别,必须解决多个关键技术问题:首先,中段弹头飞行速度高达几到十几个马赫,使得目标距离像变形,因此成像雷达必须准确补偿高速运动产生的距离像展宽和相位畸变;其次,目标和成像雷达相距甚远,目标运动产生的相对姿态变化很小,要满足成像积累角的要求,通常需要较长的成像时间,或者在较短的成像时间内采用超分辨成像算法;再次,目标在中段飞行时存在自旋、章动等运动,还可能会受到偏航、横滚等因素的影响,这使得运动补偿、横向定标变得更为困难;最后,弹头表面较光滑,即使成像,也很难获得清晰的轮廓信息,这给图像理解带来了难题。文献[5]提出了可以用于识别的ISAR图像特征,主要包括区域面积、体态比、区域周长等。但迄今为止,尚未见到有对实测的中段弹头成像识别的报道。
2.4 基于极化信息的结构特征提取与识别
雷达极化技术始终伴随着弹道导弹防御技术的发展,并一直在弹道导弹防御雷达中发挥着重要作用,由于再入弹头具有比较简单和确定的几何特征,因此可以利用极化特征如极化比等窄带极化特征和各个散射中心的宽带极化特征来鉴别再入弹头和弹体碎片等目标。文献[12]在具有弹头类目标散射特性先验信息的假定下,提出了几种弹头类目标的极化识别问题,其识别原理大多是基于模板匹配。另外,自由段再入弹头具有比较规则的运动特征(即章动运动),相应地其散射回波的极化特性具有一定的规律性,利用中段再入弹头的极化时变特性可望得到弹头的微运动特征。此外,利用雷达目标和有源假目标在极化散射特性上的差异,极化测量雷达可望有效鉴别中段弹头类目标和有源假目标[13]。
3 基于弹道特征的识别方法
3.1 基于速度差异的识别方法
在弹道导弹实施诱饵突防时,诱饵总是以一定的投放速度从弹头释放出来,考虑到诱饵的质量总是远小于弹头的质量(即便是重诱饵,差别一般也在一个数量级以上),根据动量守恒定律,弹头在诱饵投放前后的速度变化很小,可忽略不计,而诱饵在投放后速度则增加一个速度增量,非常接近投放初始速度。雷达以高分辨率发现弹头目标释放出诱饵后,通过精确获取弹头与诱饵在投放前后的速度差异信息,可将其识别。文献[14]指出,导弹防御雷达在径向上的测速精度可达厘米级,而诱饵在释放过程中相对于弹道导弹具有一定的初速度,一般在1 m/s以上。通过这种差别,可以对导弹的诱饵释放过程进行监视。基于速度测量的真假目标鉴别示意图如图4所示。
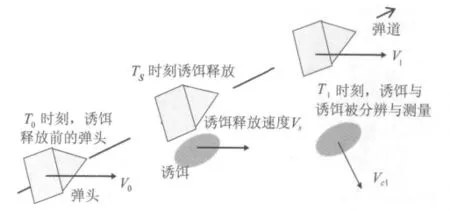
图4 基于速度测量的真假目标鉴别
3.2 基于轨道根数的有源假目标鉴别方法
中段真目标弹道符合二体运动方程,而假目标(主要是有源多假目标)则不一定满足该方程,因此,通过数据处理,采用目标轨道根数鉴别真假是一种简单有效的方法。对于自由段飞行的弹道目标,根据二体运动方程,给定一系列角度量测序列可唯一确定一条弹道轨迹。由此可知,对于角度量测序列和真目标相同而径向距离和真目标不同的有源距离假目标,其动力学特性不符合二体运动规律。因此当在雷达目标跟踪中,若对有源假目标采用二体运动动力学模型,则必然导致较大的模型失配。此外,中段还可采用动力学匹配系数、机械能、动量矩等特征进行识别,可识别有源假目标和关联错误的航迹。如果通过多部雷达组网,则对抗多假目标欺骗更为有效[15]。
4 基于微运动特征的识别方法
4.1 微动识别的物理基础
相对于目标质心运动而言,目标上各点围绕某点的转动或部件相对与物体上质心的机械振动、旋转等运动通常被称为微运动。目标的微运动特性与其结构、质量分布、初始状态和受力状态密切相关,可以作为目标识别的重要特征量[16]。雷声公司的负责人曾说“我们在中段具有的优势之一是有20分钟的时间,并且我们的中段雷达能够测量空间目标的细微的动态变化,也就是说能够绘制出目标,从而我们可以清楚地区分再次进入的导弹和复杂的干扰”。
自旋稳定是空间飞行目标最常用的姿态稳定方式,它不但控制简单,抗干扰能力较强,而且可以保持空间飞行器的指向不变,因而在弹头的姿态控制中应用甚广。在弹头自旋的同时,其极轴往往伴随着非期望的章动。弹头在中段的运动与轴对称陀螺体的自由运动相同。对于观测雷达而言,由于弹头存在的章动特性,将引起雷达视线角随之呈现的周期性变化。在弹道导弹突防中,中段弹头和轻质诱饵的微运动特性通常是不同的。对于质量较重的弹头,为了使其在中段保持姿态稳定(以保证较小的RCS和安全再入),弹头的自旋频率通常为2 Hz左右;对于质量较轻的诱饵,为了使其在中段保持稳定的姿态,其自旋频率通常要达到8~15 Hz[17]。真假目标微运动的差异是目标识别的物理基础。
4.2 基于运动目标分辨(TMR)的识别技术
导弹目标运动特征的提取就是要分离出三种运动:平移、自旋、圆锥运动(包括进动和章动),这种通过相参数据的处理,获得弹道参量和目标相对于重心的运动特征的技术称为目标运动分辨(TMR,target motion resolution)技术[18]。
导弹目标运动特征提取需要分离其重心的平移运动和相对重心的旋转运动。其中相对重心的运动分辨则主要靠相位信息获得,相位信息中包含有平移运动和相对重心运动引起的相位变化。首先在相位中要消除掉平移运动,消除后的剩余相位即是相对重心的运动,包含着自旋和圆锥运动。导弹的自旋频率通常小于10 Hz,尾翼部分反射点的旋转频率将出现在4倍自旋频率谐波上,也就是在低于40 Hz的范围内,这就是尾翼自旋的特征。圆锥运动实际上是弹体的剩余运动,即弹体的摆动,是一种低频调制,在零多普勒频率附近,大约在±20 Hz以内,可见尾翼自旋和圆锥运动在频域上是分开的,可用低通滤波将这两种运动分离开。原始相位中除掉平移运动,再去掉低通滤波的输出,则可进行尾翼自旋频率分析。由于低通滤波输出去掉了尾翼旋转反射回波的干扰,这之后再进行分辨可获得圆锥运动,包括进动、章动及视角的变化。
4.3 基于章动参数估计的识别技术
弹头的章动会引起弹头RCS周期性变化,因此基于RCS周期变化的章动频率估计就成为一种朴素的微运动特征获取方法。但深入的研究会发现,在章动周期内,弹头姿态的单调变化并不会导致弹头RCS的单调变化。换言之,在章动周期内,弹头的RCS会出现多个分布不规则的极小值和极大值点。当对弹头的时变RCS特性进行频谱分析时,弹头RCS的这种不规则变化会导致虚假的周期分量,而且这种虚假周期频率分量的幅度常常会远大于真实的章动频率分量。因此,基于RCS时变特性的微运动参数分析法的稳健性比较差。
文献[19]通过对锥体目标RCS回波数据进行多项式拟合来估计弹头类目标的进动(严格说应为自由规则进动,即章动)参数。该方法适用的前提必须是完全了解弹头类目标在各种姿态下的RCS特性。在实际中,防御方通常不可能具有如此完备的弹头信息,苛刻的数据条件使得该方法的实用性较差。文献[20]利用截头圆锥的RCS估算公式作为目标的模板信息,提出了一种弹头类目标的章动周期、章动角及惯量比的估计方法,该方法能够克服原来方法计算量大、存在虚假周期等缺点,但是该方法需要了解弹头类目标的形状和几何特性,这些先验信息通常并不易获取。因此,文献[21]分析了自由段弹头的微运动特性和旋转对称弹头的极化散射特性,提取了与弹头RCS无关的特征量——弹头散射矩阵交叉极化分量之和与主极化分量之差的比值,该特征量仅仅与弹头的章动特性有关,进而提出了一种基于弹头全极化散射特性的章动频率估计方法,可以更加有效地估计弹头的章动频率。
5 中段雷达目标识别技术的发展趋势
由于中段雷达目标识别特殊的军事价值及其实现的复杂性,使得国内外的大批研究机构、人员投入其中。目前它正处于不断发展的阶段。具体来说,它正朝以下四个方面发展。
5.1 丰富的信息获取技术
获取尽量丰富的信息是雷达目标识别的前提。随着硬件性能的不断提高,当前雷达正朝大功率、大带宽、多极化方向发展,其信息获取能力不断增强[22]。例如多极化和变极化技术,它为目标的极化结构动力学特征提取奠定了坚实的基础。又如,随着信号处理技术的不断改善与优化,雷达可能获得目标的二维信息甚至三维信息[23,24]。日渐丰富的信息获取手段是中段雷达目标识别发展的重点方向之一,不论是硬件和软件目前均处于快速的发展阶段,它们将为目标识别的方案设计和选择提供更大的空间。
5.2 深入的特征挖掘技术
有效、稳健的特征提取是雷达目标识别的关键技术环节。随着研究的深入,人们认识到,采用先进的信号处理技术,可以从回波中获得更多的运动信息和结构信息。Gene Greneker和V.C.Chen采用微多普勒技术,可以获得目标运动的细节信息,这一方法对于识别具有复杂空间运动的弹头类目标具有重要的借鉴意义。Bi从宽带回波中提取出稳健的运动信息[25]。随着雷达信息获取能力的增加,它所能提取的特征将更加丰富、全面,不仅包括宏观运动信息(如弹道轨迹、落点),微运动信息(如弹头的章动周期、频率、微多普勒),还将包括目标的散射特性和结构特性等,这将为后续的识别器设计提供极大的便利[26]。
5.3 稳健的模式识别技术
快速、高效的模式识别技术是雷达目标识别的中心环节。究其根源,雷达目标识别是模式识别技术的一个具体应用领域,因此也受益于模式识别技术的快速发展。例如,从20世纪90年代初发展起来的支持向量机[27]技术对有限样本下模式识别的根本问题进行了较系统的理论研究,建立了一种良好的通用学习算法,成为近年来机器学习算法的热点,在雷达目标识别中获得了良好的应用[28]。Tipping在此基础上发展了一种基于Bayes框架的学习算法-相关向量机,它具有更强的适用性[29]。此外,采用隐马尔可夫模型[30]、自适用高斯分类器[31]的雷达目标识别算法也有报道。目标识别是一个应用广泛的领域,不断见到有将其他范畴的识别算法移植到雷达目标识别的报道。识别算法的多样性有利于选择高效、稳健的识别器。
5.4 先进的信息融合技术
广泛、多层次的信息融合技术是改善雷达目标识别性能的重要手段。单传感器提取的特征往往是待识别目标的不完全描述,而利用多个传感器提取独立、互补的特征利于提高正确识别率、降低错误率。随着认识的不断深入,人们从理论高度上进一步认识了信息融合的深刻内涵:融合系统是建立在全信息空间基础上的一个多输入、多任务、多处理的并行系统,是全信息状态的最优处理和控制系统,信息融合不仅要在多传感器之间进行,而且应当贯穿于同一传感器内的目标检测、跟踪、识别各个阶段。在文献[32]中,作者提出:不仅要进行多特征融合,而且通过时间序贯融合可以进一步提高弹道目标识别系统的性能。识别流程如图5所示。
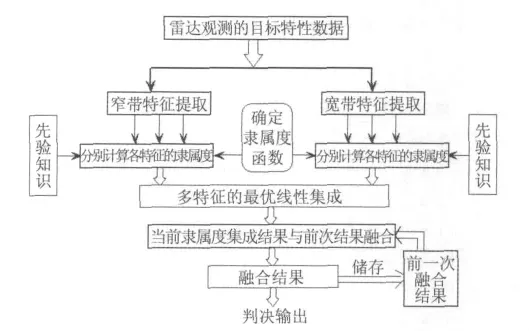
图5 弹道目标多特征综合识别流程
由于信息融合技术的特有优势,可以预见,这将是弹道中段目标识别中一个极具魅力的发展方向。
6 结语
弹道中段雷达目标识别是一项复杂的系统工程,其中既包括雷达信号处理、特征提取等基础理论问题,又包括识别方案选择、优化、组合等顶层设计问题,涉及到雷达基础理论、电子对抗、模式识别等多个领域。本质上,弹道中段目标识别是一场突防方与防御方的攻防对抗,一旦突防方得知防御方的具体识别手段,也将提出相应的对抗措施,反之亦然。可以说,突防与防御、识别与反识别是一场永远没有终点的博弈较量。最后,还需要指出的是,弹道中段雷达目标识别方法多种多样,但不存在所谓的“最优”识别方法:识别性能的优劣总是与特定的应用背景、具体战情紧密相连。因此,只有综合考虑到先验信息的多寡、目标群的复杂程度和突防方的反识别措施等因素,才有可能构建适用于具体场景的最优分类识别器。
[1]DAVID WRIGHT,LIBETH GRONLUND.Decoys and Discrimination in Tercept Test IFT-8[R].Massachusetts:Union of Concerned Scienst,2002.
[2]LIBETH GRONLUND,DAVID WRIGHT,STEPHEN YOUNG,et al.A Countermeasures-N Assessment of the Intercept Test Program of the Ground-Based Midcourse National Missile Defencse System[R].Massachusetts:Union of Concerned Scienst,2000.
[3]史别.识别真假目标是NMD的最大技术难题[J].863先进防御技术通讯(A类),2001(8):30-32.
[4]DAVID R TANKS.National Missile Defense:Policy Issues and Technological Capabilities[M].Washington:SvecCo-nway Priting Inc,2000.
[5]冯德军.弹道中段雷达目标识别与评估[D].长沙:国防科技大学研究生院,2006.
[6]WILLIAM W C,JOSEPH T M,ROBERT M O.Wideband Radar for Ballistic Missile Defense and Range-Doppler Imaging of Satellites[J].Lincoln Laboratory Journal,2000,12(2):267-280.
[7]United States General Accounting Office.Missile Defense:Review of Result and Limtitations of an Early National Defense Flight Test,ADA399464[R].Washinton:General Accounting Office,2002.
[8]THOMAS FOSTER.Application of Pattern Recognition Techniques for Early Warning Radar(EWR)Discrimination,ADA298895[R].Washinton:The Ballstic Missile Organization,1995.
[9]R LAMBOUR,T MORGAN.Assessment Orbital Debris Size Estimation from Radar Cross Section Measurements[C]//Core Technologies for Space Systems Conf.Massachusetts,Lincoln Laboratory,2001.
[10]CLARK M E.High Range Resolution Techniques for Ballistic Missile Targets[C]//British Aerospace PIC.Cowes,United Kingdom,1999:1-6.
[11]HUSSAIN M A.HRR,Length and Velocity Decision Regions for Rapid Target Identification[C]//SPIE 3810,Conference on Radar Procession,Denver,1999:40-52.
[12]李永祯.瞬态极化统计特性及处理的研究[D].长沙:国防科技大学,2004.
[13]李永祯,王雪松,王涛,等.有源诱饵的极化鉴别研究[J].国防科学技术大学学报,2004,26(3):83-88.
[14]唐毓燕,黄培康.基于高精度径向测速的宽带雷达单诱饵速度识别方法[J].宇航学报,2006,27(4):659-663.
[15]赵艳丽.弹道导弹雷达跟踪与识别研究[D].长沙:国防科技大学,2008.
[16]CHEN V C,LI F,HO S-S,et al.Analysis of Micro-Doppler Signatures[J].IEE Proc.Radar Sonar Navig.,2003,150(4):271-276.
[17]罗宏.动态雷达目标的建模与识别研究[D].北京:航天科工集团公司第二研究院,2000.
[18]陈建文,李士国.基于目标运动分辨技术提取导弹目标运动特征[J].现代雷达,2003,25(6):5-7.
[19]金文彬,刘永祥,任双桥,等.锥体目标空间进动特性分析及其特征提取[J].宇航学报,2004,25(4):408-410.
[20]陈行勇,黎湘,郭桂蓉,等.微进动弹道导弹目标雷达特征提取[J].电子与信息学报,2006,28(4):643-646.
[21]王涛,周颖,王雪松,等.雷达目标的章动特性与章动频率估计[J].自然科学进展,2006,16(3):344-350.
[22]BENNETT C L,TOOMEY J P.Target Classification with Multiple Frenquency Illumination[J].IEEE Trans.on AP,1981,29(2):352-358.
[23]AUSHERMAN D A,KOZMA A,WALKER J L,et al.Development in Radar Imaging[J].IEEE Trans.on AES,1984,20(4):363-399.
[24]XU X,NARAYANAN R M.Three~Dimensional Interferometric ISAR Imaging for Target Scattering Diagnosis and Modeling[J].IEEE Trans.on Image Processing,2001,10(7):1 094-1 102.
[25]ZHAOQIANG BI,REBAO WU,JIAN LI.Simultaneous HRR Feature Extraction and Doppler Shift Estimation of Moving Target with Rigid Bodies[C]//SPIE 3721,Conference on Algorithms for SAR,Orlando,1999:425-435.
[26]马梁.弹道中段目标微动特性及综合识别方法[D].长沙:国防科技大学,2011.
[27]BURGES C J.A Tutorial on Support Vector Machines for Pattern Recognition[J].Data Miming and Knowledeg Discovery,1998,2(2):121-167.
[28]ZHAO Q,PRINCIPLE J C.Support Vector Machines for SAR Automatic Target Recognition[J].IEEE Trans.on AES,2001,37(2):643-654.
[29]TIPPING M E.Sparse Bayesian Learning and Relvenance Vector Maching[J].Journal of Machine Learning Research,2001,21(6):211-244.
[30]BHARADWAJ P,RUNKLE P,CARIN L,et al.Multiaspect Classification of Airborne Targets Via Physics-Based HMMs and Matching Pursuits[J].IEEE Trans.on AES,2001,37(2):595-606.
[31]JACOBS S P.Automatic Target Recognition Using Sequences of High Resolution Radar Range-Profiles[J].IEEE Trans.on AES,2000,36(2):364-381.
[32]冯德军,马梁,丹梅,等.基于多特征综合的弹道目标雷达识别方法[C]//第十届全国雷达学术年会论文集.北京:国防工业出版社,2008:164-168.
猜你喜欢
兵工学报(2022年9期)2022-10-11 01:25:48
科普童话·神秘大侦探(2022年4期)2022-05-26 19:57:56
家庭科学·新健康(2022年2期)2022-03-07 06:13:38
作文小学高年级(2022年2期)2022-03-03 08:54:32
矿产勘查(2020年11期)2020-12-25 02:54:56
现代防御技术(2018年5期)2018-10-29 02:10:10
考试周刊(2018年15期)2018-01-21 17:24:26
现代防御技术(2016年1期)2016-06-01 12:13:27
中华肩肘外科电子杂志(2015年2期)2015-01-22 05:33:27
小哥白尼·趣味科学画报(2006年13期)2006-05-31 06:31:00