
铁路公路两用牵引车电子差速器设计研究
2013-11-05 06:43韩晓峰
电子测试 2013年5期
韩晓峰
(西安铁路职业技术学院, 陕西西安 710014)
1 引言
传统的公铁两用牵引车大多由汽车改装而来,其中的差速器都是机械结构的差速器,工作时噪音大、维修难及所连带的其它结构占有空间大。基于上述原因,研发结构简单、操作灵活的电子式差速器成为必然的选择。本文所设计的电子差速器替代传统机械式差速器,彻底改变公铁两用牵引车传统的驱动方式,在车轮的轮毂内安装电动机,电机的转子为外转子形式,输出转矩直接传输到驱动车轮上,取代了传统的离合器、减速器、传动桥和差速器等机械传动部件,使车辆具有灵活的行驶特性。
2 电子差速器系统的结构设计
2.1 铁两用车的转向方案
为了说明转向方案,特规定该公铁两用牵引车4个车轮编号,左前为1号轮,左后为3号轮,右前为2号轮,右后为4号轮。公铁两用牵引车的转向有两种方案:
(1)四轮独立转向方案 车辆在转弯时,要求牵引车在行驶过程中能够根据行驶状况自动调节四个车轮的转速和转角,这就是所谓的四轮转向。转向特点:独立转向、转向灵活、控制复杂。
(2)两轮转向两轮随动方案 ① 在牵引车纵向上,车辆一端两轮同时同步转向并且是驱动轮,另一端两轮随动,即轮1和轮2转向并且是同步转向的驱动轮,轮3和轮4随动不进行驱动,保持直线行驶时的平行状态。转向特点:无差速功能,需要更大的转向力矩。② 在牵引车纵向上,车辆一端两轮同时不同步转向并且是驱动轮,另一端两轮随动,根据转弯时的理想数学模型来分配驱动轮的转速,即轮1和轮2转向并且是驱动轮不同步,轮3和轮4随动不进行驱动,保持直线行驶时的平行状态。转向特点:有差速功能。综合比较各方案特点,本文采用两轮转向两轮随动方案中的第二种方式。
2.2 电子差速器控制的两种方式
车轮转速的控制一般有两种方式,即基于各个车轮转速调节和转矩调节。
第一种控制方式,采用基于转速的调节从本质来说是对于普通电动轮车辆的车轮的转速采用了Ackerman-Jeantand转向数学模型进行四轮转速的计算。由于Ackerman-Jeantand数学模型过于理想化,在计算过程中忽略了车轮侧偏角、车轮刚度及车身侧倾等许多因素对于转向的影响,因此在实际的行驶过程中车轮出现滑动的可能性较大[1]。
另一种控制方式是基于各车轮转矩的自适应差速控制系统。采用车轮转矩控制的控制方式比较复杂,虽然在车辆横摆角速度方面得到了优化,但是车辆的转向响应却因此变得稍有迟滞[2]。
2.3 电子差速器的整体结构
电子差速器的驱动控制结构如图2.1所示,根据操作人员的输入(转向转角),对整车的行驶状态进行调整。由电子差速控制器输出各车轮的期望转速和转角到各自的轮毂电机和转向电机,再由转子位置传感器和转速传感器反馈回轮毂电机的运行信息,进而由电子差速器对转弯进行控制。

图2 .1 电子差速器结构
1-转向电机2;2-轮毂电机2;3-转子位置传感器2;4-转速传感器2;5-转子位置传感器1;
6-转速传感器1; 7-转向电机1; 8-轮毂电机1
电子差速系统将各种有用信号转变为控制指令,监控轮毂电机和转向电机的运行状态。对于电子差速器单个系统而言,就是将给定速度信号和转角信号与传感器检测到的轮毂电机的转速信号和转向电机的转角信号对比分析并将信号转化为控制指令,来控制公铁两用牵引车转弯行驶过程中车轮所需要的转速和转角。
3 电子差速器电控单元的选择
电控系统主要有继电接触器控制、PLC继电器控制、单片机控制、工业计算机控制和DSP控制。在复杂系统中,PLC控制系统有着取代继电接触器控制系统的趋势。工业计算机适合较大的控制系统,计算机监督控制系统在逻辑控制方面不如PLC控制[2]。对于量大的配套项目,单片机有成本优势,就单项工程及设计来说PLC更具有可靠性。DSP适用于高速数据处理。本文以PLC与继电器相结合来完成对车轮转向的控制。
3.2 电子差速器主要设备的选择使用
公铁两用牵引车电子差速器控制系统主要设备包括:轮毂电机、转向电机、转速传感器、转子位置传感器以及PLC等。
3.2.1 轮毂电机的选择
轮毂电机的驱动方式可以分为减速驱动和直接驱动两种。
减速驱动:此种驱动结构如图3.1所示,减速机构装置放置在电机和驱动车轮之间,有减小速度和增加扭矩的作用。在高转速运行下,具有很大的功率和较高的效率,通过减速机构齿轮减速增扭后,整个轮毂电机扭矩变大。不足之处是不能够使用液态润滑,减速机构齿轮磨损很快,因此这种驱动适用于要求承载能力较大的丘陵、山区等环境中使用[3]。

图3 .1 减速驱动轮毂电机图
3.2 直接驱动轮毂电机
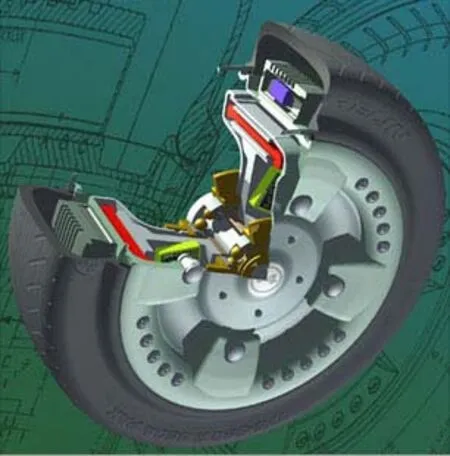
直接驱动:此种结构如图3.2所示,轮毂电机很多都采用外转子形式,就是直接将转子安装在车辆的轮辋上。因其没有减速机构,整个驱动轮的结构更加简单、紧凑,效率也进一步提高,响应速度更快。缺点就是车辆在起步时,在顶风或爬坡时等都承受了很大扭矩,这时就需要较大电流,很容易损坏电池和永磁体的结构和寿命,适用于平路、负载较轻场合[3]。
根据整车参数的要求,选择第二种驱动形式(直接驱动)。
3.2.2 转向电机的选择
转向驱动机构有以下三种布置方式。
(1)低速直流电机+圆柱齿轮副 低速直流电机跟小齿轮相连,小齿轮带动与轮毂电机支架同轴的大齿轮旋转,占纵向空间大。
(2)直流电机+立式摆线针轮减速器 电机与减速器同轴布置,尺寸相对紧凑,但垂向距离较大。
(3)直流电机+两级蜗轮蜗杆减速机 本设计采用两级蜗轮蜗杆减速机的传动方式,转向电机。
3.2.3 转速传感器的选择
转速传感器分为以下四种:光电式转速传感器、变磁阻式转速传感器、电容式传感器和编码器式转速传感器。因速度直接影响整车的运行状态,所以主要是考虑其测量精度,因该车的车速比较低,除编码器能够精确测量速度以外,其它在速度较低时,都不能够很好的测量,所以选择用编码器式转速传感器进行测量。
3.2.4 转子位置传感器的选择
转子位置传感器分为三种:霍尔位置传感器;电磁式位置传感器;光电式位置传感器。霍尔位置传感器精度不高,电磁式位置传感器笨重复杂,不宜选用,第三种虽然不耐高温,但本公铁两用牵引车的运行温度不会影响到它的精度,因此选用光电式位置传感器进行转向电机位置的测量。转子位置传感器确定的量程范围是0~±90°,输出信号是0~5V。
3.2.5 PLC的选择
Programmable Logic Controller(即可编程逻辑控制器),简称PLC。目前,国内外生产PLC的厂家很多,不同厂家的PLC产品虽然基本功能相似,但有些特殊功能、价格、服务及使用的编程指令和编程软件都不相同。选择PLC主要从以下五个方面来考虑。
① I/O点的估算 I/O点数是PLC的一项重要指标,设计时在估计的总点数上再加20%~30%。根据电子差速器控制对象和继电器状态控制计算得I/O点数如表3.1所示。
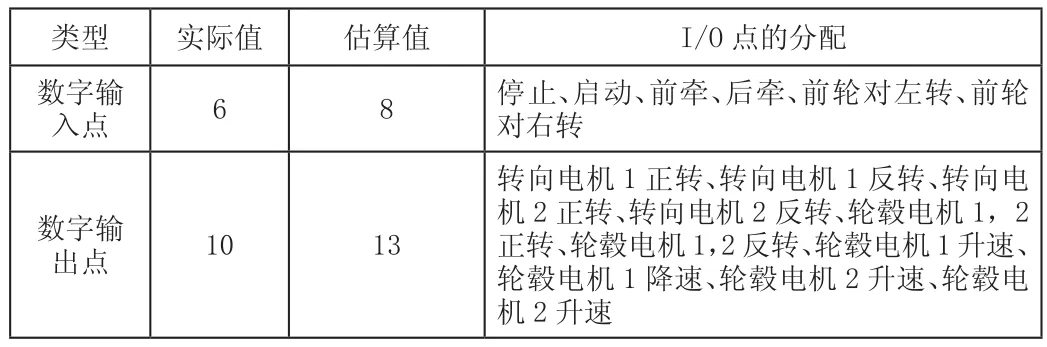
表3 .1 I/O点数估计
② A/D和D/A的估算 两个转子位置传感器的输入需要接入A/D,电子差速器计算的两个转速信号需要从D/A输出。
③ 用户储存容量的估算 根据经验,每个I/O点及各部件的有关功能占用的内存量基本如下所示:开关量输入部件:10~20B/点;开关量输出部件:5~10B/点;由上述规定的总字节数,并且考虑在原基础上再增加25%左右的余量,选择合适的PLC的内存容量。内存总量是:(8×20+13×20)×125%=525B
④ CPU功能选择 CPU随机型的不同通常有三种:通用微处理器(如8086,80286,80386等)、单片机型、位片式微处理器。小型PLC采用8位微处理器或单片机作为CPU;大中型PLC采用16位微处理器,集成度高,速度快;大型PLC采用高速度位片式微处理器,它具有灵活性强、速度快、效率高的优点。
⑤ 电气控制系统工况的选择 公铁两用牵引车的控制对象是轮毂电机和转向电机,并且具有差速功能,因此要求所选PLC具有计数器和有数模转换接口。
3.2.6 继电器的选择
由于PLC的输出电流为300mA,远远不能直接驱动轮毂电机和转向电机,所以需要通过放大信号的继电器,以控制转向电机和轮毂电机的通断。
固体继电器(SolidStateRelays,SSR)是一种全部由固态电子元件组成的、无触头通断电子开关。与电磁继电器相比,体积小、重量轻、可靠等优点。选择固体继电器作为控制器件,固体继电器分为交流型固体继电器(AC—SSR)和直流型固体继电器(DC—SSR)两种。AC—SSR以双向晶闸管作为开关元件, DC—SSR一般以功率晶体管作为开关元件接通和关断交流或直流负载电源。
在电控系统中,选用直流型固体继电器(DC—SSR)继电器,线圈额定电压、吸合电流和释放电流必须满足PLC的输出规格,即最小额定电压大于4.5V,吸合电流必须小于300mA,释放电流必须大于PLC的输出漏电流0.1mA;输出端的切换电流和电压必须满足转向电机和轮毂电机的输入规格,即切换电流必须大于56A(经过计算),切换电压必须大于96V。
4 电子差速器控制的流程
基于以上所选择的控制单元,设计电子差速器在执行各个功能的过程中各个部分逻辑顺序。电子差速器控制系统的主程序由直行时速度V的测量、转向电机2转角β的控制、轮毂电机1速度Vin的控制、轮毂电机2速度 Vout的控制程序组成,主程序如图所示。
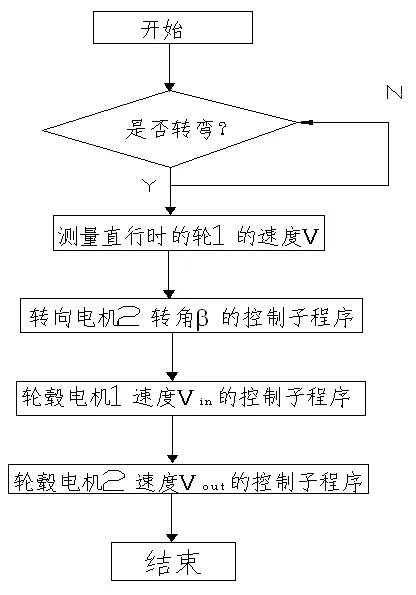
图4 .1 主程序控制流程图
5 结论
本文主要讨论公铁两用牵引车的电子差速系统。介绍了公铁两用牵引车及其电子差速器的发展现状,类比了现代车辆上的电子差速器系统,并且结合本公铁两用牵引车的现状。在公铁两用牵引车转弯时功能需求分析的基础上,对其电子差速器系统进行设计研究。
[1] 周勇等.四轮毂电机电动车的电子差速控制算法[J].电机与控制学报.2007.09
[2] 黄名铸.PLC、FCS、DCS三大控制系统的特点和差异.山东:中华纸业,2005.26(4).
[3] 张媛媛.混合动力驱动汽车及关键技术研究[D],吉林大学,2009,06.
猜你喜欢
中国核电(2021年3期)2021-08-13
装备制造技术(2020年11期)2021-01-26
减速顶与调速技术(2020年3期)2021-01-18
装备制造技术(2020年3期)2020-12-25
装备制造技术(2020年12期)2020-05-22
北京汽车(2018年4期)2018-09-08
廉政瞭望(2017年21期)2017-12-07
中国设备工程(2017年23期)2017-01-20
广西电力(2016年5期)2016-07-10
汽车实用技术(2015年8期)2015-12-26
