
Smart decontamination device for small-size radioactive scrap metal: using abrasion pin in rotating magnetic field and ultrasonic wave cleaner*
2013-11-01 02:07:55YonghoHongSuriParkSangwookHanByungjickKim
Yongho Hong, Suri Park, Sangwook Han, Byungjick Kim
(Department of Chemical Engineering, Soongsil University, Seoul 156-743, Korea)
Smart decontamination device for small-size radioactive scrap metal: using abrasion pin in rotating magnetic field and ultrasonic wave cleaner*
Yongho Hong, Suri Park, Sangwook Han, Byungjick Kim
(Department of Chemical Engineering, Soongsil University, Seoul 156-743, Korea)
A smart decontamination device is developed for small-size radioactive scrap metal (SSRSM) arisen from nuclear facilities. The abrasion pin in rotating magnetic field and ultrasonic wave cleaner are used for solving the problems of the second decontamination and high treatment cost. At first, the decontamination efficiency of each device is improved by upgrading the design. Optimal operating conditions are determined for each device. Next, both techniques are applied sequentially. Experimental results show that the efficiency of combined decontamination device is higher than that of each device. With the use of the developed device, the various SSRSMs are decontaminated for 15 min treatment in magnetic abrasion device and 15 min treatment in ultrasonic cleaning device. Decontamination index ranges from 18 to 56. Absolute values of all decontaminated samples are below the background value.
radioactive scrap metal; decontamination; magnetic field; ultrasonic cleaning
0 Introduction
Radioactive scrap metal from nuclear facilities has increased year by year. And the cost of disposing the radioactive waste is getting higher and higher. Therefore, the decontamination and recycling of radioactive scrap metal has become a research subject of great importance[1-6].
In this paper, the research is undertaken to develop a smart decontamination device for small-size radioactive scrap metal (SSRSM), which can solve the core problem of the radioactive waste disposal.
Fig.1 shows the treatment process of SSRSM. SSRSM is decontaminated by various methods. If radioactive intensity of the object is lower than the standard value, the metal waste can be reused or recycled. Otherwise, metal waste will go to drum disposal. Thus, it is important to develop an efficient device which can maximize the reused and recycled portion.
The types of radioactive contamination on metal waste can be classified by easy or hard adherence to the surface and radioactive contaminated center of the object[7]. The research in this paper is limited to develop a device to decontaminate the former case.
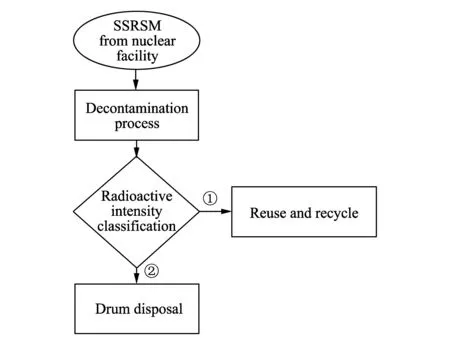
Fig.1 Treatment process of SSRSM
Table 1 lists performance and weakness of six kinds of decontamination methods. For chemical and electrolysis methods, their decontamination performances are excellent, but the second contamination problem makes them difficult to be put into use. For dry and supercritical methods, the decontamination performances are also good. But high fixing and operating cost makes them difficult to be used. For magnetic and ultrasonic methods, they both have the weaknesses. But if two methods are combined, there is a possibility of synergy.
Table 1 Performance and weakness of present decontamination methods
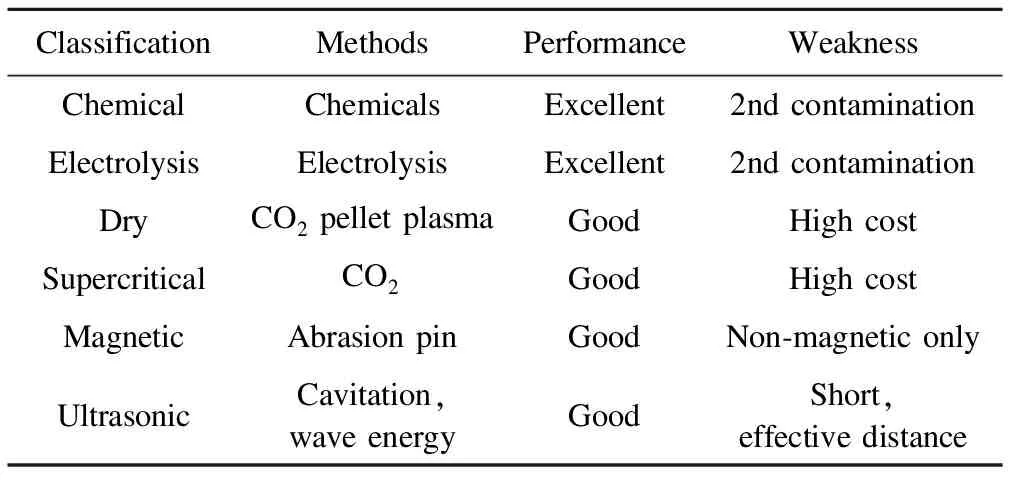
ClassificationMethodsPerformanceWeaknessChemicalChemicalsExcellent2ndcontaminationElectrolysisElectrolysisExcellent2ndcontaminationDryCO2pelletplasmaGoodHighcostSupercriticalCO2GoodHighcostMagneticAbrasionpinGoodNon⁃magneticonlyUltrasonicCavitation,waveenergyGoodShort,effectivedistance
The research was undertaken to solve the above mentioned significant problems of the conventional methods. For this purpose, we combine most promising abrasion pin in the magnetic field and ultrasonic cleaning methods[8-12].
1 Theory
1.1 Mechanism of magnetic abrasion
Fig.2 shows two dimensional magnetic field distribution and magnetic force acting.
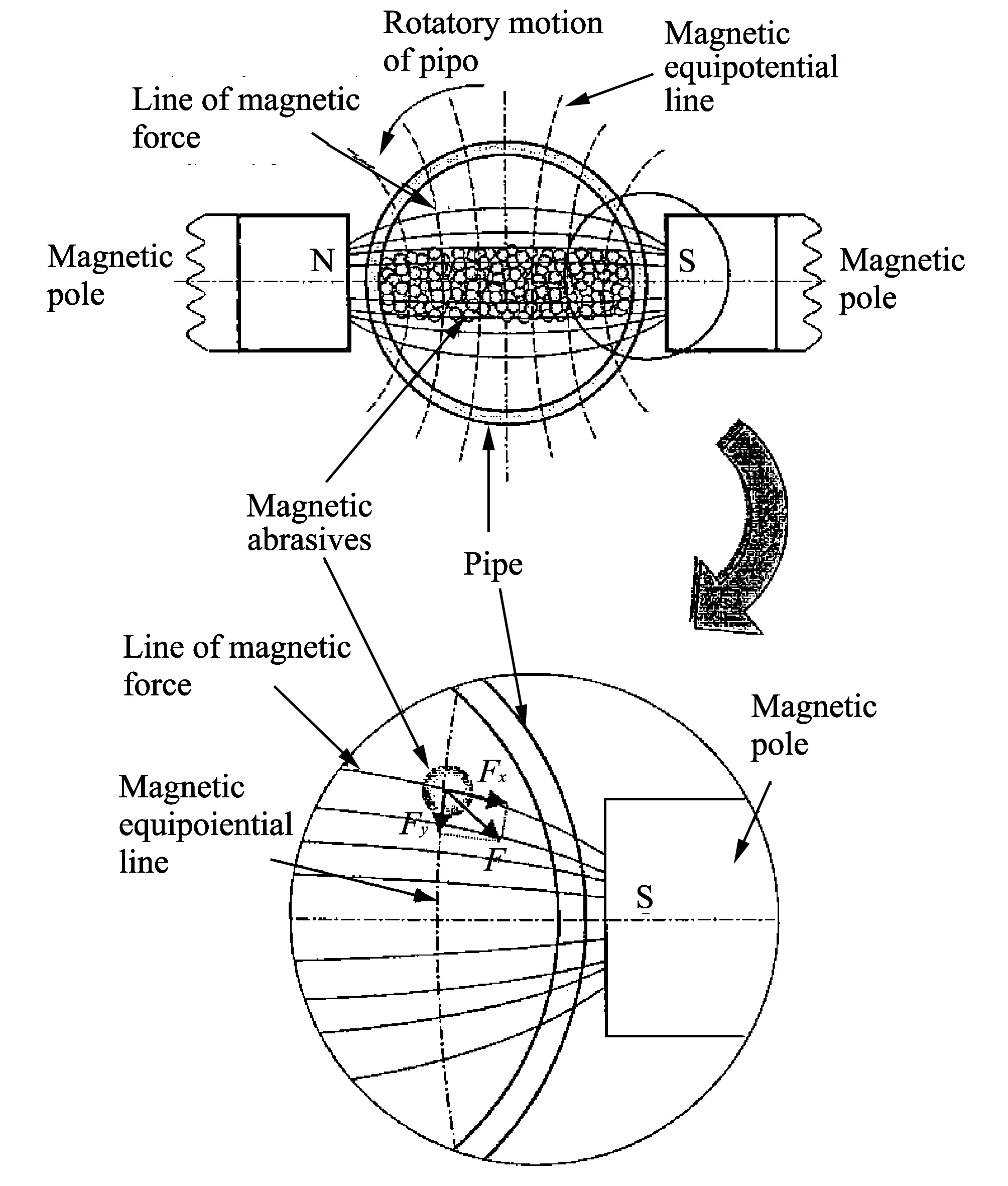
Fig.2 Two dimensional magnetic field distribution and magnetic force acting
In the magnetic device, the magnetic field outside the pipe creates the non-uniform magnetic field inside the pipe, which causes the abrasion pressure between the abrasion pin and a magnetic pole. When the pipe rotates rapidly, there occurs relative movement between the abrasion pin and the pipe inside, which causes the abrasion of the pipe inside.
Abrasion pressure means the magnetic force exerted on each abrasion pin, as described in Fig.2, which can be explained in the theoretical manner. In the non-uniform magnetic field, the force exerted on each pin is the summation of magnetic line direction component Fxand right angle to magnetic line direction component Fy, which is given in the form of F. Magnetic force Fxand Fycan be expressed by Eq.(1) and Eq.(2), respectively.
(1)
(2)
where V is volume of magnetic abrasion pin; X is susceptibility of magnetic abrasion pin;x and y are magnetic direction and right angle direction, respectively; H is intensity of magnetic field; ∂H/∂x and ∂H/∂y are differentials of magnetic field intensity magnetic line and right angle direction, respectively.
Thus, F can be expressed as
(3)
This force increases proportionally to the pin volume V times susceptibility X. Susceptibility X can be determined by the pin material and manufacturing process.
The exerted pressure on the abrasion pin is affected by magnetic field intensity H and multiplied by differentials of field intensity ∂H/∂x and ∂H/∂y. Thus, by increasing the diameter of the pin, the exerted pressure increases. And with the same diameter, the exerted pressure increases by increasing the magnetic field intensity. For this purpose, the leakage of the magnetic field can be minimized or the magnetic field distribution can be raised.
1.2 Improved magnetic abrasion device
Fig.3 shows the enhanced magnetic abrasion device.
From the preliminary experiments, it can be found that there exists dead space where magnetic field is weak and it can not make the abrasion pin move. In an effort to eliminate the dead space, one permanence magnet is added and it is made to move in the horizontal direction.
Fig.3 Enhanced magnetic abrasion device
1.3 Mechanism of ultrasonic cleaning
Ultrasonic cleaning uses high frequency sound waves to agitate liquid. Cavitation bubbles induced by agitation act on contaminants adhering to the substrates like metals, plastics, glass, rubber and ceramics. This action also penetrates blind holes, cracks and recesses. The intention is to thoroughly remove all the traces of contamination tightly adhering or embedded onto solid surfaces. Water or other solvents can be used according to the type of contamination and workpieces. Contaminants can include dust, dirt, oil, pigments, rust, grease, algae, fungus, bacteria, lime scale, polishing compounds, flux agents, fingerprints, soot wax and mold release agents, biological soil like blood, and so on. Ultrasonic cleaning can be used for a wide range of workpieces with different shapes, sizes and materials, and may not require the part to be disassembled prior to cleaning. Objects must not be allowed to rest on the bottom of the device during the cleaning process, because that will prevent cavitation from taking place on the part of the object not in contact with water. Fig.4 explains that the cavitation bubble implodes close to a fixed surface, generating a water jet[7].
Fig.4 Three cleaning stages done by cavitation bubbles
1.4 Improved ultrasonic cleaning device
Fig.5 shows improved ultrasonic cleaning device.
Fig.5(a) is the conventional device and Fig.5(b) is the improved device. From the preliminary experiments, it can be found that the distance from the vibrator is inversely proportional to cleaning performance. The size of the ultrasonic cleaning device is reduced, the vibrator is installed on the bath bottom to generate of ultrasonic waves, and the lift is added to the device in the horizontal direction.
2 Materials and methods
2.1 Small-size radioactive scrap metal
Fig.6 shows various types of SSRSM samples. The size of radioactive scrap metal is small and the longest length is less than 1 m.

Fig.6 SSRSM samples
These objects are termed as SSRSMs. SSRSMs from nuclear facilities mainly include hand tools, gears, chains, pipes, plates, and so on.
2.2 Experimental method
Fig.7 shows the combined decontamination device.

Fig.7 Combined decontamination device
2.3 Analysis method
Table 2 lists the surface decontamination detectors adopted in the experiment.

Table 2 Surface decontamination detector
(4)

(5)
3 Results and discussion
3.1 Decontamination performance of magnetic abrasion device
Fig.8 presents the comparison of decontamination performance between the conventional and enhanced magnetic abrasion devices.
Fig.8 Comparison of decontamination performance between conventional and enhanced magnetic abrasion devices
The decontamination coefficient of the conventional is 2.8 and the decontamination coefficient of the enhanced is 12.8. Thus the performance of the enhanced device is about 4 times better than that of the conventional one.
3.2 Decontamination performance of ultrasonic cleaning device
Fig.9 presents the compasison of decontamination performance between the conventional and enhanced ultrasonic cleaning devices. The performance of the enhanced ultrasonic cleaning devices of all the groups is 3-9 times better than that of the conventional ones.
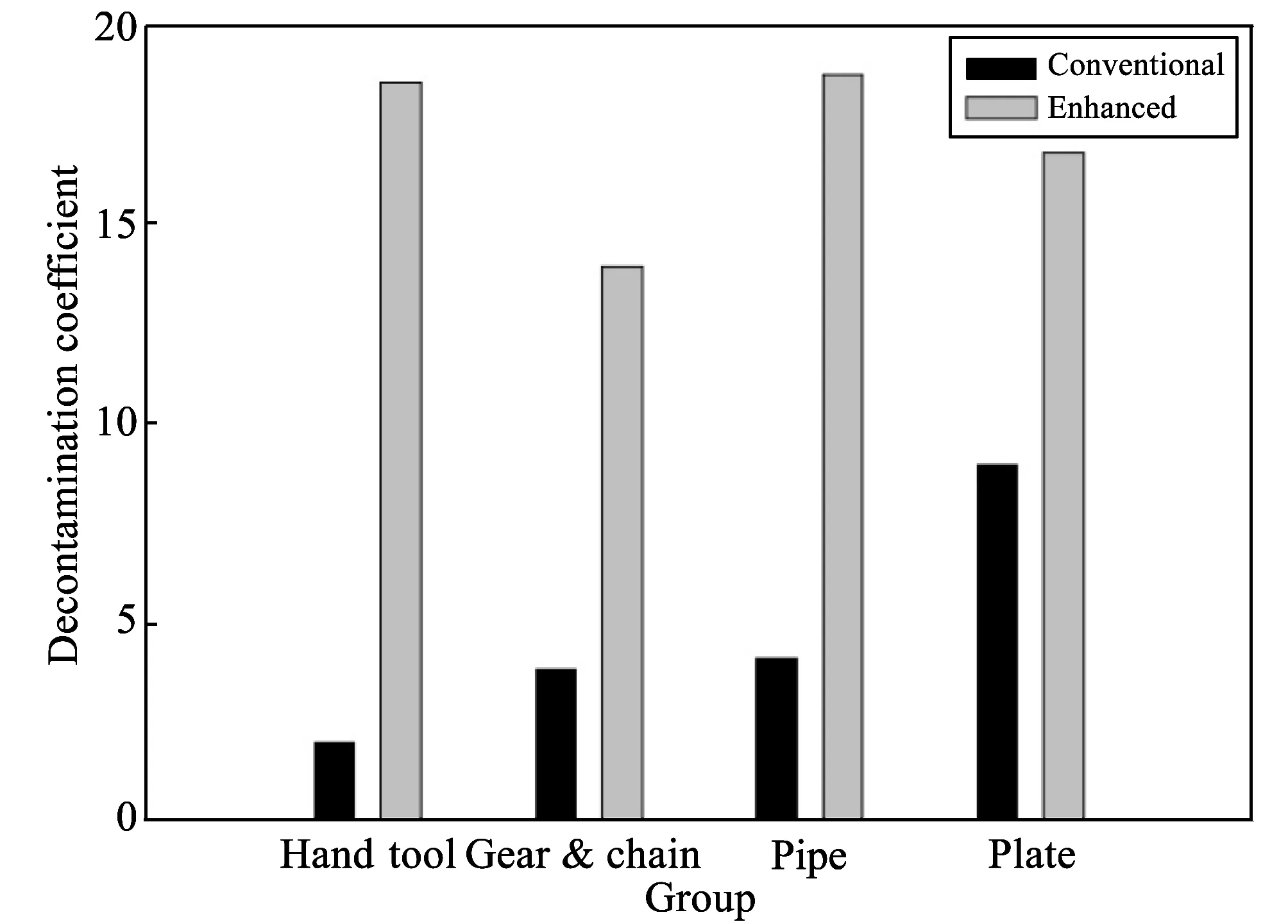
Fig.9 Comparison of decontamination performance between conventional and enhanced ultrasonic cleaning device
3.3 Performance of combined device
Fig.10 presents the change of decontamination coefficient with time in the magnetic and ultrasonic combined apparatus.
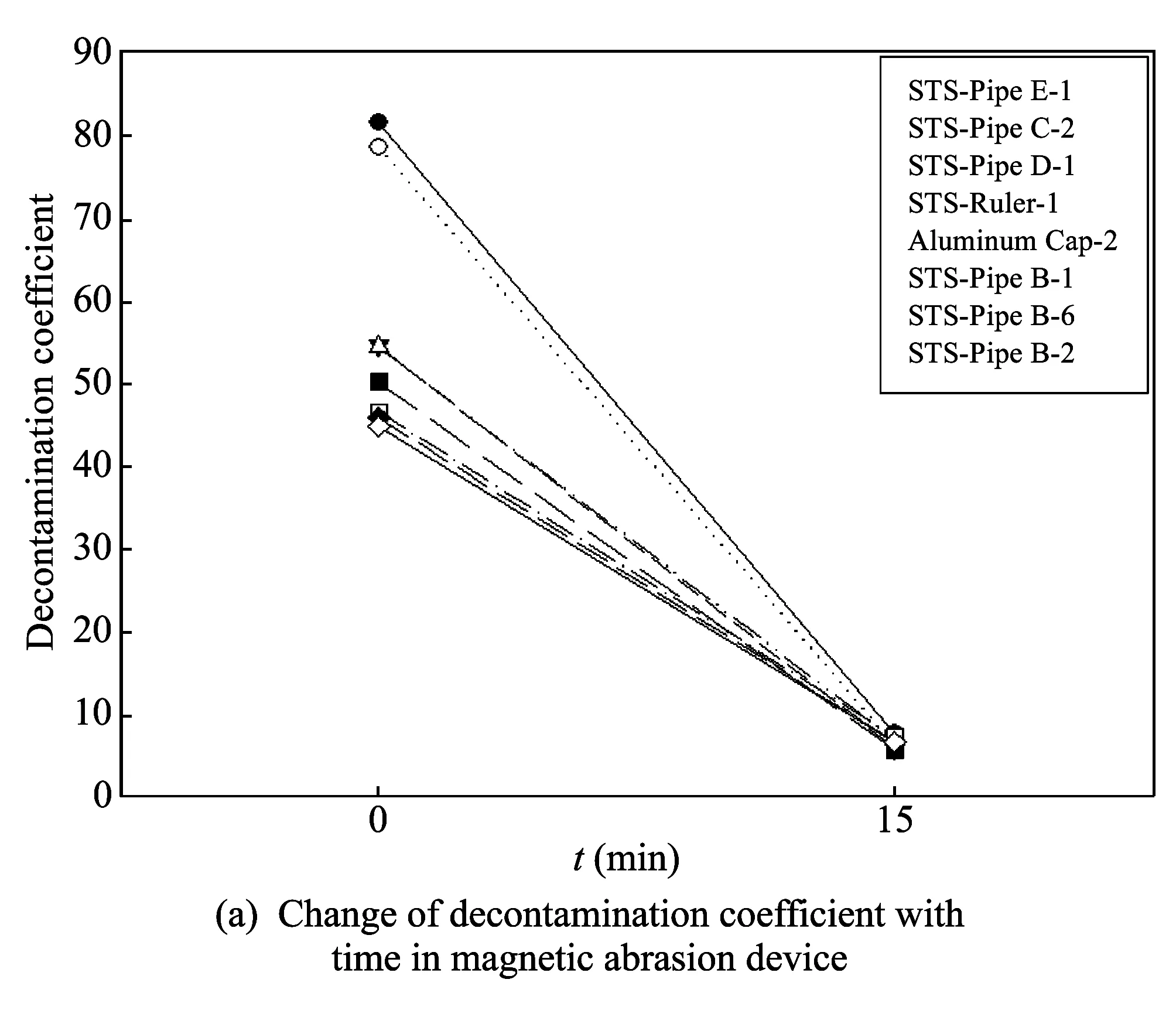
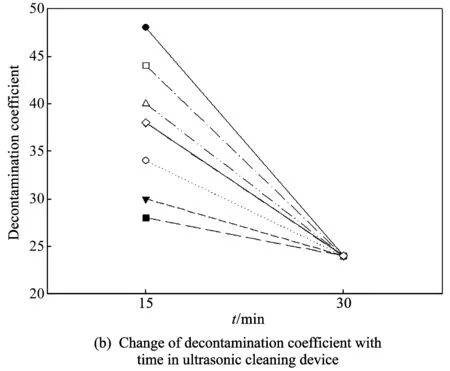
Fig.10 Decontamination index with time in magnetic and ultrasonic combined apparatus
The radioactivity after 15 min treatment in the magnetic device ranges from 28 to 48 cps. The values are bigger than 24 cps of the background. The radioactivity after another 15 min treatment falls below the value of 24 cps, which means that all the SSRSMs treated in the combined device can be reused or recycled.
4 Conclusions
1) A smart decontamination device is developed for SSRSM to minimize the second contamination.
2) The optimal conditions of abrasion pin’s size, rpm and operation time are obtained.
3) Sequential applications of the magnetic abrasion and ultrasonic techniques show the synergy effect by compensating for the weakness of each-unit process.
4) After the various shapes of SSRSM are treated with the use of the developed device, the relative value, decontamination index ranges from 18 to 56, and the absolute values (cps/g) are no bigger than the background value.
[1] International Atomic Energy Agency. Methods for the minimization of radioactive waste from decontamination and decommissioning of nuclear facilities. Technical reports series No.401. International Atomic Energy Agency, Vienna, 2001.
[2] Nuclear Energy Agency Task Group on Decontamination. Decontamination techniques used in decommissioning activities. Nuclear Energy Agency and Organization for the Economic Co-operation and Development, 1999.
[3] Valsalaa T P, Royb S C, Shahc J G, et al. Removal of radioactive caesium from low level radioactive waste (LLW) streams using cobalt ferrocyanide impregnated organic anion exchanger. Journal of Hazardous Materials, 2009, 166(2/3): 1148-1153.
[4] Nieves L A, Chen S Y, Kohout E J, et al. Analysis of disposition alternatives for radioactively contaminated scrap metal. Journal of The Franklin Institute-Engineering and Applied Mathematics, 1998, 335(6): 1089-1103.
[5] de Lainetti P E O. Development of a new process for radioactive decontamination of painted carbon steel structures by molten salt stripping. In: Proceedings of International Unclear Atlantic Conference on Innovations in Unclear Technology for a Sustainable Future (INAC2009), Rio de Janeiro, Brazil, 2009.
[6] Ozawa M, Suzuki T, Koyama S, et al. Separation of rare metal fission products in radioactive wastes in new directions of their utilization. Progress in Unclear Energy, 2005, 47(1-4): 462-471.
[7] Buckentin J M, Damkroger B K, Schlienger M E. Radioactive scrap metal decontamination technology assessment report. Sandia Report, SAND 96-0902, National Technical Information Service, USA, 1996.
[8] Paik Y S. Cleaning technology development using a new solvent for green nuclear energy. Kyung Hee University Press, Korea, 2003.
[9] Korea Electric Power Corporation. Surface decontamination technology development for radioactive waste volume reduction. Korea Electric Power Corporation, 2001.
[10] Co-ACT. Decontamination device development of the final report for using magnetic field, 2009.
[11] Domínguez-Gadea L, Cerezo L. Decontamination of radioisotopes. Reports of Practical Oncology and Radiotherapy, 2011, 16(4): 147-152..
[12] Kim J N. Application cases of ultrasonic technique. Mechanic Journal, 1998, 36: 34-39.
date: 2013-01-26
The MKE(Ministry of Knowledge Economy), Korea, under the Convergence-ITRC(Convergence Information Technology Research Center) support program supervised by the NIPA(National IT Industry Promotion Agency) (NIPA-2012 C6150-1101-0004)
Byungjick Kim (bjkim@ssu.ac.kr)
CLD number: X771 Document code: A
1674-8042(2013)03-0302-05
10.3969/j.issn.1674-8042.2013.03.022
 Journal of Measurement Science and Instrumentation2013年3期
Journal of Measurement Science and Instrumentation2013年3期
- Journal of Measurement Science and Instrumentation的其它文章
- Test on oxygen and benzene contents in gasoline by mid-infrared spectroscopy*
- Particle-filter-based walking prediction model for occlusion situations*
- Automatic estimation and removal of noise on digital image*
- Application of signal sparse decomposition in dynamic test*
- Kravchenko probability weight functions in problems of radar signals correlation processing*
- AC current automatic calibration using two different TCC designs*