水中光视觉图像分割及目标提取方法
2013-10-25 05:53:32张铭钧万媛媛李煊
哈尔滨工程大学学报 2013年12期
张铭钧,万媛媛,李煊
(哈尔滨工程大学 机电工程学院,黑龙江 哈尔滨 150001)
水中光视觉是水中目标探测及识别的主要技术手段之一[1].近海浅水环境中,由于水介质波动对光线散折射的影响及吸收效应,使得水中图像存在对比度低、信噪比低等问题.全局自适应阈值分割方法是一种常用的区域并行处理图像分割方法,本文采用该方法进行水中图像分割时[2],对水中强噪声干扰有较好的抑制能力,但由于自然光从球体上方照射,水中图像存在目标物在图像中颜色不均匀的问题,全局自适应阈值法易导致仅分割出部分目标物的问题.为弥补这一缺陷,作者借鉴文献[3]的方法将图像划分为若干个子块,通过计算每个子块的梯度直方图,确定每个局部区域的Otsu分割阈值以降低水下光照条件对图像分割结果的影响.但由于目标物底部与背景在灰度级上具有相似性,易引起目标和背景间粘连.文献[4]在自定义的H~SV颜色空间下,对不同颜色分量进行序列分割,以饱和度S作为主分析通道,作者在实验中发现,S受光照影响较严重,分割结果存在球体目标提取不完整等问题.针对上述问题,本文将传统Otsu法扩展至HSI彩色空间,提出一种基于HSI彩色空间的两步分割方法,与文献[4]不同,本文以光照低敏性的H通道信息为主,进行第1步阈值分割,以减少光照条件变化对饱和度S的影响,在灰度级上融合S和I通道信息,进行第2步阈值分割,以消减目标物颜色不均匀对分割结果的影响,得到最终图像分割结果,并进行水池对比实验验证.
水中图像中存在水泡、悬浮物等干扰,采用Otsu法、基于HSI彩色空间的方法以及本文两步分割方法得到的分割结果中均包含悬浮物等各种非目标区域.采用基于区域生长方法进行目标区域提取时[5],分割结果中存在干扰物,易导致提取出面积大于目标区域的干扰物区域.采用基于形状描述方法进行目标区域提取时[6],分割结果中目标区域内部存在孔洞,易导致提取出非目标区域在形状描述中更接近圆形.针对上述问题,本文借鉴区域生长方法[7]的种子生长原理及单次标记连通区域的特性,提出一种基于空域的目标区域提取方法.与上述典型方法不同,本文以连通区域为局部单元,对每个小单元进行区域面积约束和形状约束的同时,加入目标区域孔洞填充,对图像不同特征的连通区域进行处理,以滤除噪声、背景等非目标区域并填充目标区域内部孔洞,以精确提取出目标区域,通过水池对比实验进行方法验证.
1 基于HSI彩色空间的2步分割方法
针对水中图像存在对比度低、信噪比低以及目标物颜色不均匀等问题,本文采用自适应Otsu法进行图像分割时,由于目标底部与背景在灰度级上较相似,存在目标和背景间粘连等问题.同时,自然光光照强度和光线入射角度的改变,使得图像中目标物颜色不均匀的情况发生变化,本文采用文献[4]的方法进行图像分割时,由于饱和度S受光照影响严重,存在目标物分割不完整等问题.针对上述问题,本文将Otsu法扩展至HSI彩色空间,提出一种基于HSI彩色空间的2步分割方法,与文献[4]不同,本文以光照低敏性的H通道信息为主,以减少光照条件变化对饱和度S的影响,并增加S和I通道信息的融合,分两步进行Otsu阈值分割,得到最终图像分割结果.
1.1 基于H通道的第1步分割
由于水中图像对比度较低,目标与背景间的过渡边缘在灰度级上较为相似,采用Otsu法阈值分割时,存在目标与背景粘连等问题.本文区别于Otsu法在灰度级上的度量,考虑到光照条件变化对饱和度S分量的影响,利用图像中目标与背景的颜色差异进行第1步图像分割.
在HSI彩色空间中,H通道具有光照低敏性和单调唯一性,本文以H通道作为主分析通道,对H通道伪灰度图像进行第1步Otsu阈值分割.选定一个阈值t将H通道伪灰度图像中的所有像素分成c1(0≤c1≤t)和 c2(t≤c2≤L)两类(即背景和目标),通过Otsu法[8]计算出c1和c2类间方差最大时的最优阈值T,将T与H通道伪灰度图像中各像素值进行比较,得到第1步分割后的图像h'(x,y)为

式中:f(x,y)表示H通道伪灰度图像,‘255’对应目标区域,‘0’对应背景区域.h(x,y)中的h表示对应HSI彩色空间中的H通道.
对一幅静水环境下采集到的图像进行分析,图1(a)为原始图像,将其转换至HSI彩色空间,并将H通道信息归至[0,255],获得图1(b)所示的H通道伪灰度图像,对该图像进行Otsu阈值分割,得到图1(c)的第1步分割结果.
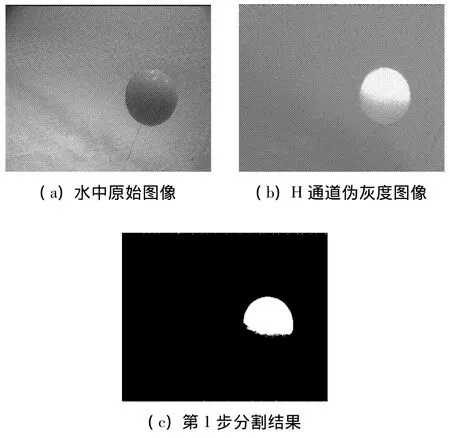
图1 色调H分量的图像分析Fig.1 Image analysis of Hhue component
由图1(c)可知,H通道伪灰度图像进行Otsu阈值分割后,可将图像分成存在颜色差异的2部分,却依旧存在目标分割不完整的现象.为分割出完整的目标区域,下节融合了S和I通道信息,以弥补单一H通道表述信息的不完整.
1.2 基于融合图像的第2步分割
自然光从球体上方照射,使得图像中目标物颜色不均匀,红色球体下半部彩色特征不明显,呈现暗色调,对具有光照低敏性的H通道伪灰度图像进行Otsu法阈值分割后得到的目标区域不完整.针对此问题,本文在1.1节第1步分割结果的基础上融合S和I通道信息,对融合图像进行第2步阈值分割.
如图2所示,对图1(a)的水中原始图像在HSI彩色空间中进行通道信息分离,分别提取其S、I通道信息,得到图2(a)和图2(b)所示的S、I通道伪灰度图像,图2(c)表示S和I通道信息融合后的图像.
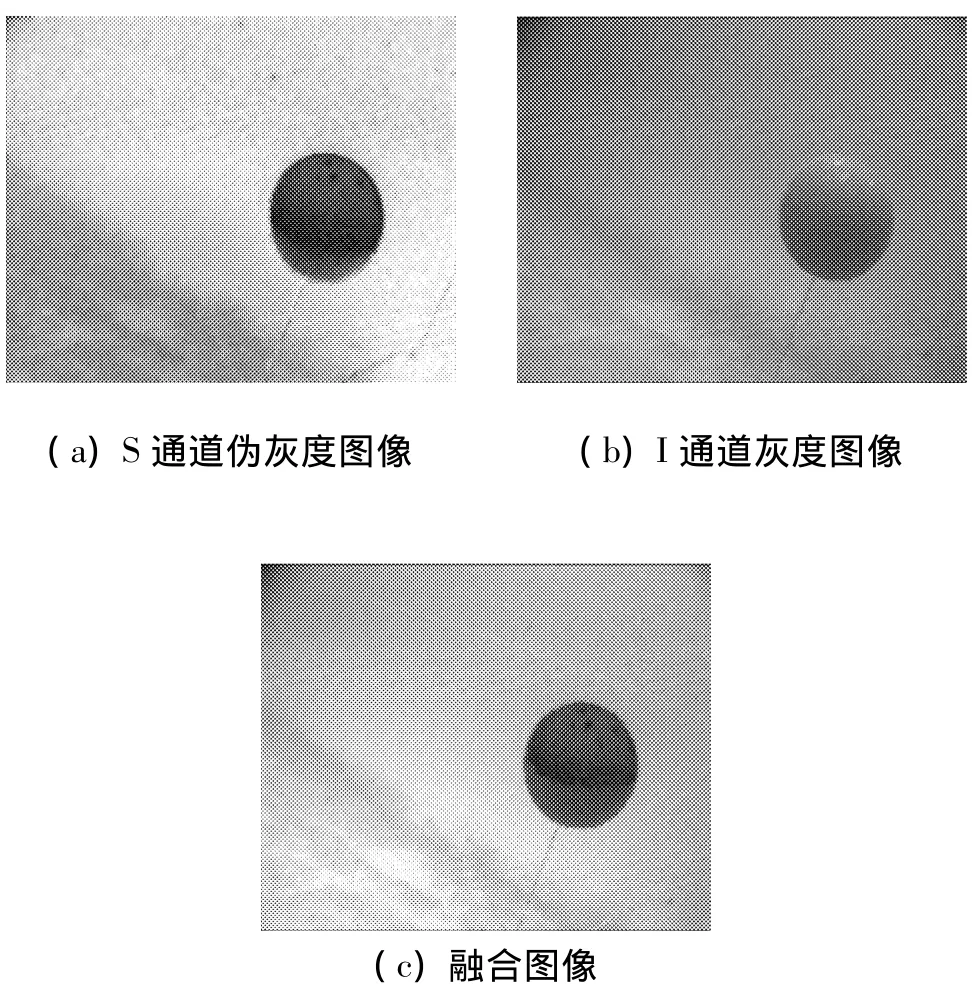
图2饱和度S及亮度I分量的图像分析Fig.2 Image analysis of saturation and illum ination component
HSI彩色空间中,饱和度S信息描述了颜色的纯度,分析图2(a),目标上半部由于光照充分,颜色的纯度较高,S表现为较低的灰度值,而目标下半部由于缺乏光照导致颜色纯度较低且边缘部分较为模糊,饱和度级别更接近背景,S表现为较高的灰度值.亮度I信息与光照强度及分布情况相关,分析图2(b),在光照充足的目标上半部I表现为较高的灰度值,而光照缺乏的下半部I表现为较低的灰度值.基于上述分析,本文在灰度级上融合S和I通道信息,进行第2步阈值分割.
融合时,在图1(c)的第1步分割结果的基础上,用S通道信息替代图像中目标上半部,用I通道信息替代图像其余部分,得到在灰度级上融合S和I通道后的图像E(x,y):

式中:s(x,y)和i(x,y)中的s和i分别表示对应HSI彩色空间中的S通道和I通道.
融合图像E(x,y)如图2(c)所示.分析图2(c),目标区域至背景区域间的过渡连接处边缘的灰度跳跃变大,区域间对比度提高.对融合后的图像(即图2(c))再次进行Otsu阈值分割,完成图像的第2步分割,得到最终的分割结果如图3所示,相比较图1(c)第1步分割结果中得到部分球体目标区域的情况,图3中得到与背景彻底分离的球体目标区域,且较为完整.
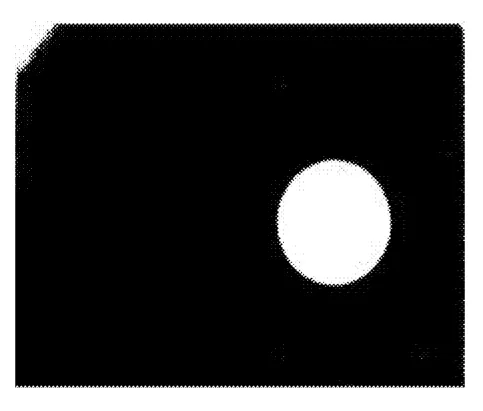
图3 最终分割结果Fig.3 Final result of segmentation
2 基于空域的目标区域提取方法
水中图像往往存在水泡、悬浮物等干扰,采用Otsu法、基于HSI彩色空间的方法以及本文两步分割方法得到的分割结果中均包含悬浮物等各种非目标区域.为提取出目标区域,本文采用基于区域生长的方法时,易提取出面积最大的干扰物区域;采用基于形状描述的方法时,易提取出圆形度最大的目标区域内部孔洞.针对上述问题,本文提出一种基于空域的目标区域提取方法.该方法以连通区域为局部单元,对每个小单元进行区域面积约束和形状约束的同时,加入目标区域孔洞填充,对不同特征的连通区域分别进行处理,以滤除噪声、背景等非目标区域并填充目标区域内部孔洞,完成球体目标区域的精确提取.
2.1 区域标记及图像划分
本文采用基于区域生长的连通区域标记方法,对分割结果进行图像区域划分.其核心思想在于,对像素(灰度值为“255”)及其8-邻域进行连通性判断与标记,直到所有像素均被标记且属于特定的独立子单元.根据噪声点、干扰物和目标物几何特征的差异对划分的N个独立子单元进行整合,将图像划分为噪声区域、干扰区域和目标区域.
如图4所示,图4(a)为水中原始图像,对其采用本文分割方法进行图像分割后,得到图4(b)所示分割结果,对图4(b)进行区域标记和图像划分得到噪声小区域(图4(c))、背景干扰区域(图4(d))和球体目标区域(图4(e)).
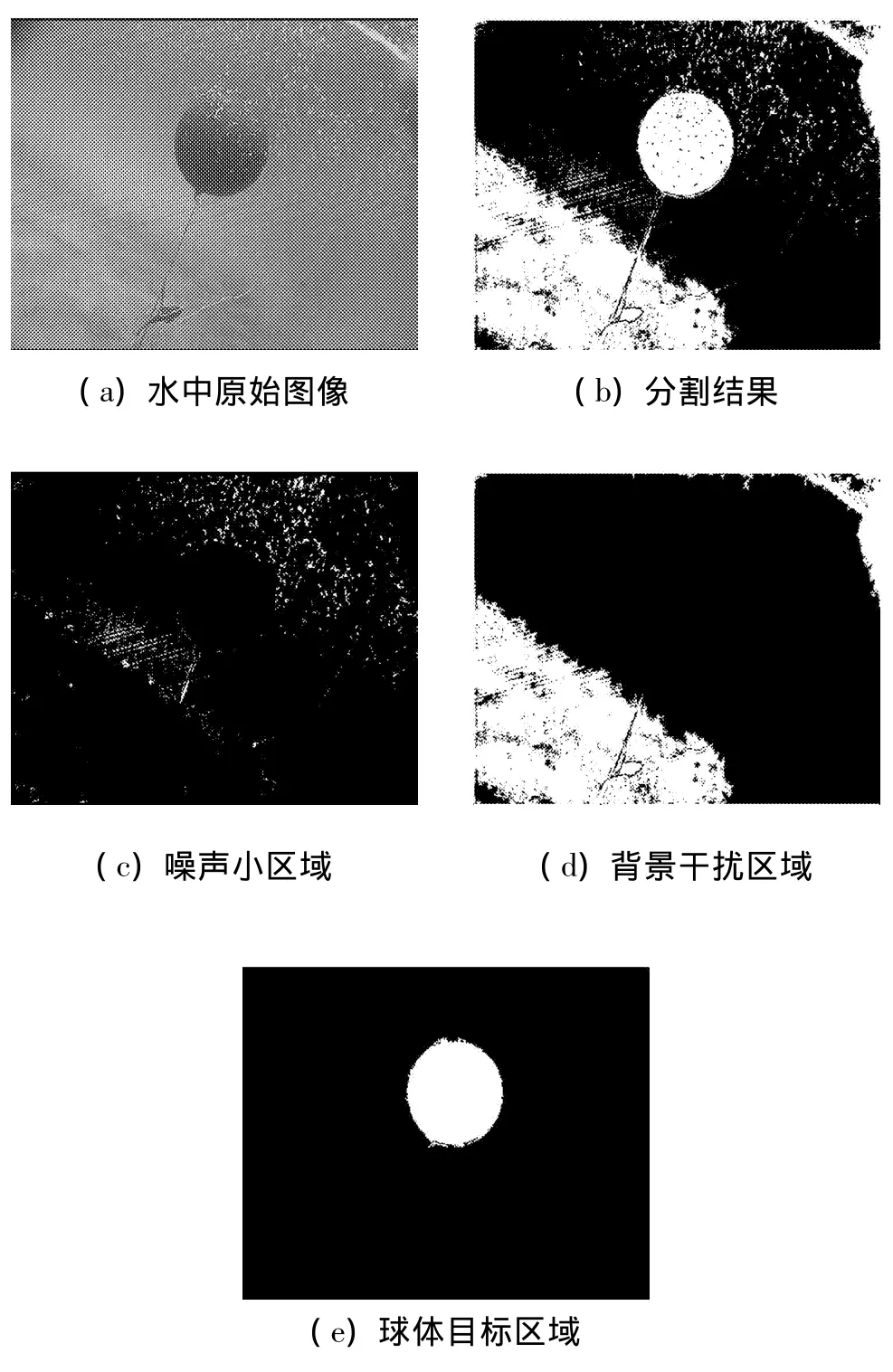
图4 二值图像及其划分Fig.4 Binary image and the division
2.2 基于区域面积约束
对比分析图4(c)~(e):目标区域只有一个,形状规则且面积较大;背景干扰区域有若干个,形状不规则且面积大小不一;噪声小区域数目繁多,面积较小且位置分散.不同于典型的基于区域生长方法提取出面积最大区域的思路,本文基于区域面积的方法进行噪声小区域的滤除,其核心思想在于,将每个独立子单元面积与设定的面积阈值A0进行比较,将大于阈值的子单元保留,小于阈值的子单元剔除,具体实现过程如下:
遍历图像的每个独立子单元,统计各子单元中像素点的个数来表示该子单元面积AS,若子单元的面积AS<A0,则说明该子单元属于噪声小区域,将其灰度值置换为0;若AS>A0,保留当前子单元,不做处理.遍历整幅图像,直至滤除所有属于噪声小区域的子单元.得到如图5所示结果,对比图4(b)的图像分割结果可明显看出,噪声小区域被全部滤除.
从上述实现过程中可以看出,面积阈值A0的设置是关键.该值与图像中目标区域半径r0有关,根据摄像机与目标间的距离,并结合摄像机透视投影原理,可得面积阈值A0:

式中:r为目标的真实半径,ZC为摄像机与目标间的距离,f为摄像机焦距,k为摄像机的比例因子,f和k可通过摄像机标定获得.
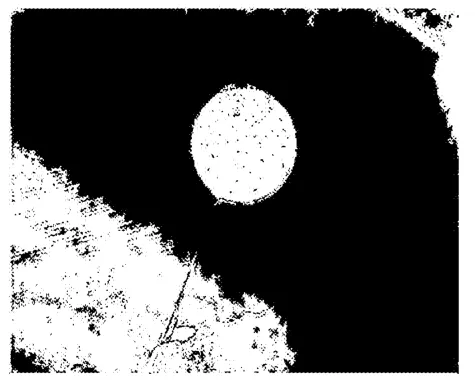
图5 滤除噪声小区域结果Fig.5 Noise-reduced result for small region
2.3 区域孔洞填充
采用典型的基于形状描述方法对图5进行处理时,得到图6所示结果.作者进一步研究发现,由于水中悬浮物及干扰物的影响,目标区域内部存在大量孔洞,进行圆形描述时,伪目标区域比目标区域更接近圆形,从而导致提取出图6所示伪目标区域.为了准确地提取出目标区域,需要对其内部孔洞进行填充.
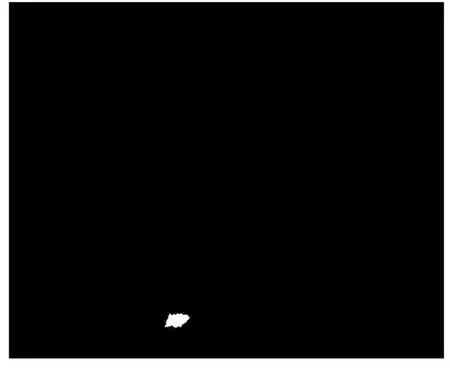
图6 伪目标区域Fig.6 Pseudo target region
理论上讲,目标内部孔洞和噪声小区域形态类似,与噪声小区域不同,该孔洞位置上属于目标区域,但其灰度值与背景灰度值相同,均为0,所以不能单纯地采用基于区域面积的约束进行消除.
借鉴噪声小区域滤除的方法,本文的目标区域孔洞填充方法如图7所示,对图像反色后,目标区域灰度值为0,而其内部孔洞灰度值为255,将目标内部孔洞看作白色噪声点,利用区域面积约束的方法滤除即可,再对图像反色可以得到图8所示,各个区域内部的孔洞均被填充完整,进行下一步基于形状的约束.
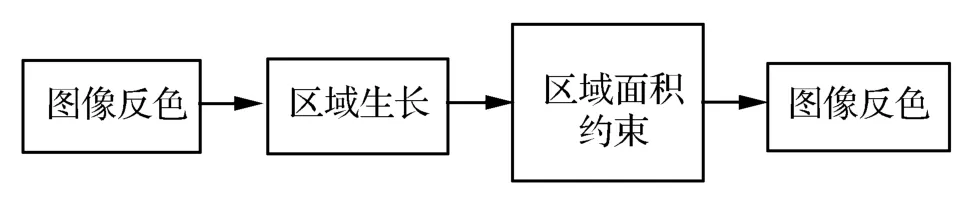
图7 标区域孔洞填充Fig.7 The filling of target region hole
图8 区域孔洞填充结果Fig.8 The result of filling target region hole
2.4 基于形状约束
对比分析图4(d)和图4(e)可知,目标区域与背景干扰区域存在明显形状差异,考虑到目标物为球体,本文通过与标准圆形特征的对比,建立形状约束条件,滤除背景干扰区域.选择圆形度作为度量指标来区分背景干扰区域和目标区域,计算不同子单元的圆形度,其中,圆形度最大的子单元,即球体目标区域,同时,将其他子单元的灰度值置换为0,从而滤除背景干扰区域.至此,经过基于区域面积约束、区域孔洞填充以及基于形状约束的方法对分割结果进行处理后,得到图4(e)所示最终球体目标区域提取结果,对比图
4(b)的分割结果可知,噪声小区域和背景干扰区域均被剔除,图像中只存在球体目标区域,且目标提取较为完整.
3 水池对比实验结果及分析
为验证本文提出基于HSI彩色空间的两步分割方法和基于空域的目标区域提取方法,在水池环境下进行了对比实验验证.在实验中,球体目标为红色,悬浮于水面下约0.5m,分别进行静水环境、有流环境和有干扰环境的不同方法对比实验.其中,有流环境为模拟水流,作者利用推进器人工造流,流速为0.5 kn(0.25 m/s).
3.1 图像分割实验
为了验证本文提出的基于HSI彩色空间的2步分割方法的有效性,采用经典Qtsu法,文献[4]中的基于自定义H~SV颜色空间的图像分割方法和本文图像分割方法分别对静水和有流环境下采集到的水中图像进行分割处理,结果如图9和10所示.图9(a)和图10(a)分别表示自然光下采集到的水中原始图像.图9(b)~(d)表示分别对图9(a)采用上述3种方法得到的图像分割结果,图10(b)~(d)表示分别对图10(a)采用上述3种方法得到的图像分割结果.
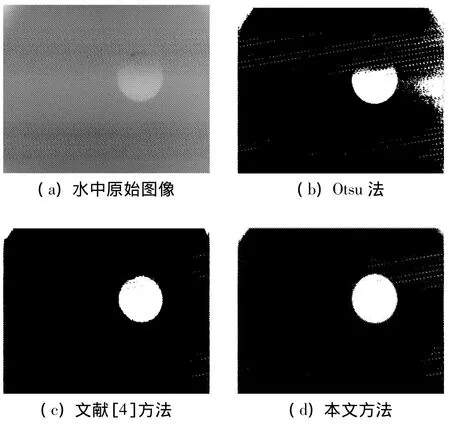
图9 静水环境下图像分割结果Fig.9 Image segmentation results in static water environment
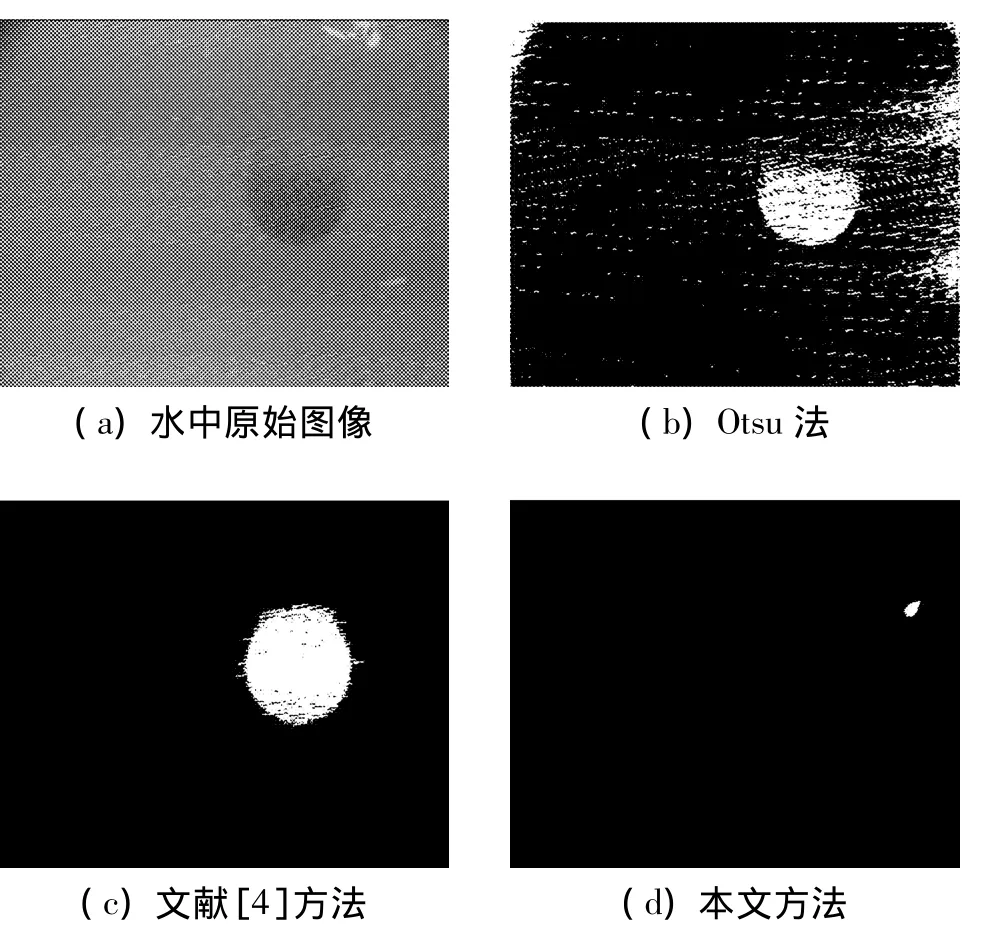
图10 有流环境下图像分割结果Fig.10 Image segmentation results in flow water environment
从图9(a)和图10(a)中可明显看出,球体目标颜色分层严重,目标上半部由于光照充足,彩色特征表现正常,呈红色,目标下半部由于缺乏光照,彩色特征不明显,呈暗色调.其中,有流环境下采集到的图像清晰度较差.
对比分析图9(b)~(d),由于目标下半部灰度值与背景对比差别较小,采用Otsu阈值法得到的分割结果中仅得到部分目标物,且有较多噪声干扰;文献[4]方法的分割结果中,对噪声抑制能力较好,但由于光照的影响,目标物存在部分缺失.本文方法的分割结果中,得到较完整的目标物且噪声较小.
对比分析图10(b)~(d),由于水流的影响,Otsu法和文献[4]方法的分割结果中,分割出部分目标物且噪声干扰严重,本文方法的分割结果中,存在少量噪声点,且分割出完整的目标物.
采用图像分割评价函数对图9和图10中3种方法的分割结果进行性能评价,得到表1的统计结果.本文选用3个评价指标,目标像素误分类误差(ME)[9]、区域特征一致性(UM)[10]及区域间对比度(GC)[11].
对表1中数据进行分析可知,静水环境下,本文方法的误分类误差ME较Otsu法和文献[4]方法分别降低74.1%、10.5%;区域一致性UM分别提高39.1%、1.6%;区域间对比度 GC分别提高21.1%、2.7%.有流环境下,本文方法的ME较Otsu法和文献[4]方法分别降低73.4%、23.3%;UM分别提高27.5%、4.4%;GC分别提高23.1%、2.5%.
综合上述分析,Otsu法和文献[4]方法均存在目标物分割不完整的问题,本文方法能够分割出较完整的目标物且噪声干扰较小.相较于Otsu法、文献[4]方法,本文方法的误分类误差在静水和有流环境下分别为1.7%、2.3%,实验结果反映出本文2步分割方法的有效性.
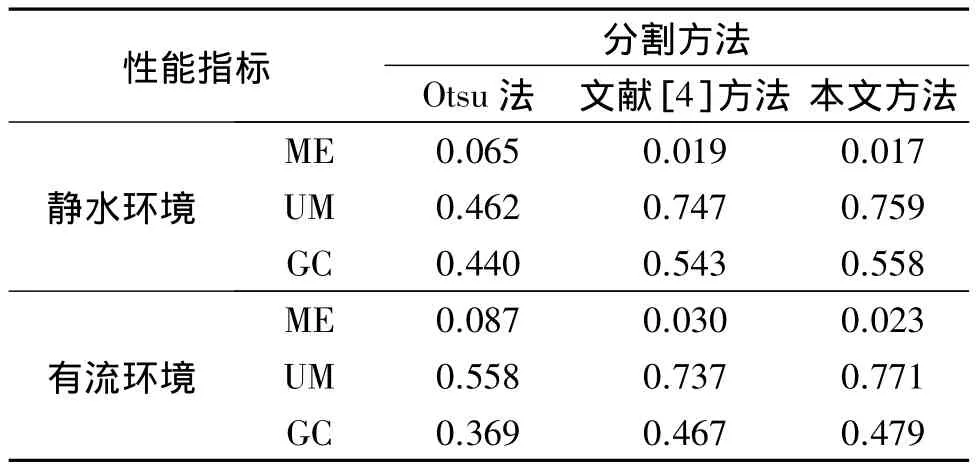
表1 水中图像分割结果统计Table 1 Underwater image segmentation results
3.2 球体目标区域提取实验
为验证本文提出的基于空域的目标区域提取方法的有效性,采用典型的基于区域生长方法、基于形状描述方法和本文目标区域提取方法分别对有流环境和有干扰环境下采集到的水中图像进行对比实验,得到如图11和12所示的目标区域提取结果.有干扰环境中用手拨水,造成球体目标物周围出现大量水泡,且存在人手干扰.
图11(a)和图12(a)为水中原始图像,对其分别采用本文方法进行图像分割,得到图11(b)和图12(b)所示分割结果.图11(c)~(e)表示分别对11(b)采用上述3种方法得到的目标区域提取结果.图12(c)~(e)表示分别对12(b)采用上述3种方法得到的目标区域提取结果.
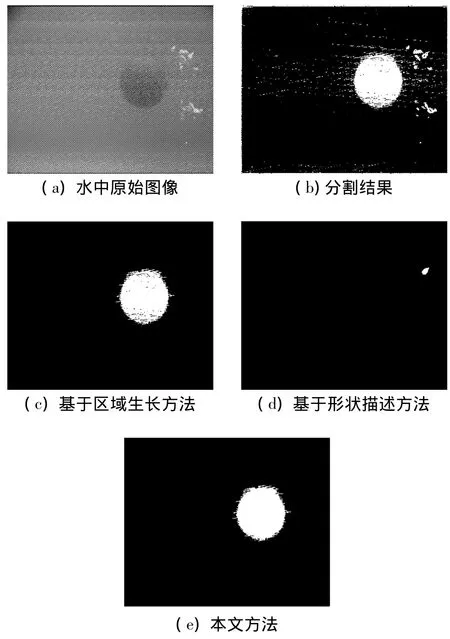
图11 有流环境下目标区域提取对比Fig.11 Comparison of target region extraction results in flow water environment
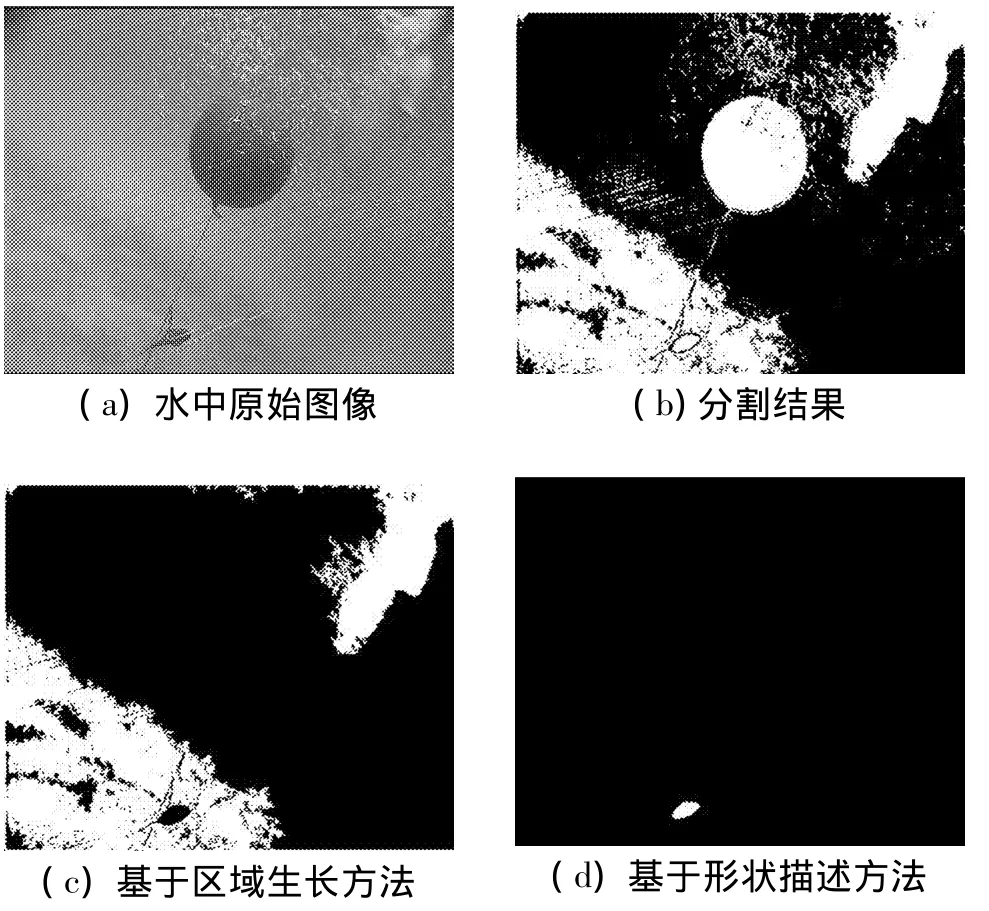
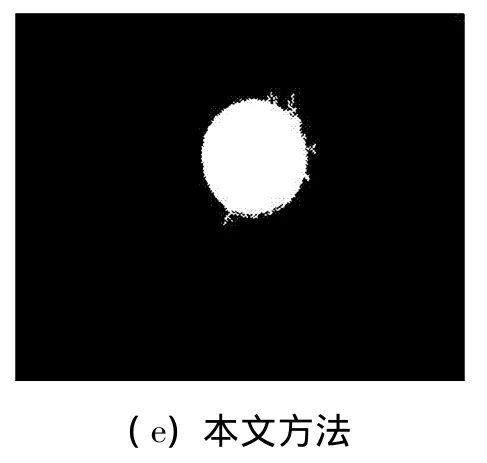
图12 有干扰环境下目标区域提取对比Fig.12 Comparison of target region extraction results in interferential environment
有流环境和有干扰环境采集到的图像中均存在较多的悬浮物等干扰,因此本文分割方法得到的分割结果(图11(b)和图12(b))中,目标物虽被完整分割出来,但存在大量的噪声点和干扰物.
对比分析图11(c)~(e),基于区域生长方法将噪声点滤除并提取出目标区域,但由于目标区域内部存在孔洞,目标区域提取存在一定缺陷.基于形状描述方法将水泡错当作目标提取出来,目标区域提取失败.本文方法提取出目标区域,并填充目标区域内部孔洞,目标区域提取较完整.
对比分析图12(c)~(e),基于区域生长方法将噪声点剔除,但提取出面积大于目标区域的大背景区域,目标区域提取失败.基于形状描述方法将干扰物提取出来,目标区域提取失败.本文方法剔除大量噪声点及其他干扰物的同时,提取出目标区域,且目标区域较为完整.
综合上述分析,3种方法在目标区域提取过程中,均能滤除噪声点,相较于基于区域生长和形状描述的方法,本文方法在2种环境下均能提取出较完整的目标区域,实验结果表明本文基于空域的目标区域提取方法的有效性.
4 结束语
针对水中图像对比度低、信噪比低以及目标物在图像中颜色不均匀等问题,本文提出一种基于HSI彩色空间的2步分割方法.水池对比实验表明,在静水环境和有流环境中,本文方法相较于Otsu法和文献[4]方法,其误分类误差ME均存在不同程度的降低,且区域一致性UM和区域间对比度GC均存在不同程度的提高,表明本文方法较上述2种方法能够有效地分割出水中球体目标物.针对水泡、悬浮物等对图像分割结果的干扰问题,提出一种基于空域的目标区域提取方法.水池对比实验表明,有流环境下,基于区域生长方法提取出的目标区域,但其内部存在孔洞,基于形状描述方法提取出图像中的水泡,本文方法较上述2种方法能够滤除噪声并提取出较完整的目标区域;有干扰环境下,基于区域生长方法提取出大背景区域,基于形状描述方法提取出图像中干扰物,本文方法较上述2种方法能够有效滤除干扰并准确提取出目标区域.
[1]AMAURY N,CEDRIC P,MATTHEW D.Robust visionbased underwater target identification and homing using self similar landmarks[J].Field Robotics,2008,25(7):360-377.
[2]LI Zuoyong,ZHANG D,XU Yong,et al.Modified local entropy-based transition region extraction and thresholding[J].Applied S of t Computing,2011,11:5630-5638.
[3]马保国,乔玲玲,贾寅波.基于局部自适应阈值的细胞图像分割方法[J].计算机应用研究,2009,26(2):753-756.MA Baoguo,QIAO Lingling,JIA Yinbo.Cell image segmentation method based on partial adaptive thresholds[J].Application Research of Computers,2009,26(2):753-756.
[4]曹宇,赵杰,闫继宏.基于自定义颜色空间的快速图像分割方法[J].计算机科学,2009,36(2):265-267.CAO Yu,ZHAO Jie,YAN Jihong.Image segmentation method based on custom color space model[J].Computer Science,2009,36(2):265-267.
[5]GUO Haitao,ZHOU Jun,SONG Ruili,et al.Segmentation of a sonar image from a small underwater target using the improved fuzzy clustering algorithm[C]//IEEE Second International Conference on Mechanic Automation and Control Engineering.Hohhot,China,2011:5218-5220.
[6]KYUNGM H,HYUN TC.Shape context based object recognition and tracking in structured underwater environment[C]//IEEE International Geoscience and Remote Sensing Symposium.Vancouver,Canada,2011:617-620.
[7]WANG Hongtao,LUO Changzhou,WANG Yu,et al.New algorithm for binary connected-component labeling based on run-length encoding and union-find sets[J].Journal of Beijing Institute of Technology,2010,19(1):71-75.
[8]尹奎英,刘宏伟,金林.快速的Otsu双阈值SAR图像分割法[J].吉林大学学报:工学版,2011,41(6):1760-1765.YIN Kuiying,LIU Hongwei,JIN Lin.Fast SAR image segmentation method based on Otsu adaptive double threshold[J].Journal of Jilin University:Engineering and Technology Edition,2011,41(6):1760-1765.
[9]SEZGIN M,SNAKUR B.Survey over image thresholding techniques and quantitative performance evaluation[J].Journal of Electronic Imaging,2004,13(1):146-165.
[10]ZHANG Hui,JASON E F,SALLY A G.Image segmentation evaluation:a survey of unsupervised methods[J].Computer Vision and Image Understanding,2008,110:260-280.
[11]ANDREEA I,BOGDAN P,MARIUS B,et al.Regionbased measures for evaluation of color image segmentation[C]//Proceedings of the International Multiconference on Computer Science and Information Technology.Wisla,Poland,2010:717-722.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
电子技术与软件工程(2021年7期)2021-06-16 09:35:48
高技术通讯(2021年3期)2021-06-09 06:57:48
消费电子(2020年5期)2020-12-28 06:58:27
收藏界(2019年3期)2019-10-10 03:16:22
池州学院学报(2017年5期)2018-01-23 02:54:31
自动化学报(2017年5期)2017-05-14 06:20:56
光学精密工程(2016年4期)2016-11-07 09:04:56
光学精密工程(2016年1期)2016-11-07 09:01:59
Chinese Journal of Chemical Engineering(2016年10期)2016-05-26 09:28:34