
量测不确定下多传感器一致性数据融合算法*
2013-10-22 07:25付春玲宫德龙
传感器与微系统 2013年7期
付春玲,宫德龙,李 捷
(1.河南大学 基础实验教学中心,河南 开封 475004;2.河南大学计算机与信息工程学院,河南开封 475004)
0 引言
目前,在工业自动化系统中的数据采集环节一般使用电子量测设备或智能仪表,但在实际工作环境中,障碍物遮挡、传感器故障以及量测环境中一些不确定扰动等随机干扰因素的影响将给量测数据采集地带来极大的困难。另外,由于不可避免的传输误差、计算误差等系统干扰因素,将使得量测数据不能完全反映事物的真实状态和数量关系。针对此类问题的处理,国内外专家学者基于参数估计的思想相继设计了大量的数字滤波器,典型方法如:算术平均、极大似然估计、最小二乘估计以及最大后验估计[1,2]。以上算法应用的基本前提在于测量数据无缺失,即传感器探测概率为1;同时要求测量数据具有已知的概率分布特性,且测量次数足够多。近年来,结合凸优化理论和生物生存与觅食机理构建了遗传算法、粒子群算法、蚁群算法和人工鱼群算法等[3~6]。然而,此类算法在应用中都涉及到适应度函数的设定,这必然要求使用者对于待处理对象具有深刻的认识,即具备一定先验信息,这必然限制了算法的应用范围。
考虑到量测不确定多传感器信息合理利用,Lou R C率先引入置信概率距离的概念度量各传感器量测数据一致性,其中置信距离形式需要结合具体工程背景设置[7,8]。在此基础上,Wang 结合模糊理论中隶属度函数定义了一种决策距离来衡量传感器测量数据之间的支持程度,并在此距离的基础上构造多传感器测量数据之间的距离矩阵、关系矩阵,最后,利用有向图方法求解出最终参与数据融合相互支持的最大传感器连接组,进而在一定的准则下完成最优融合[9]。但通过决策距离确定关系矩阵时需要先验信息设定阈值度量信息的可利用程度,并且二值判定方式也降低了量测信息的利用效率。文献[10]利用矩阵特征向量的稳定理论进行融合,文献[11,12]分别定义了模糊型指数函数量化数据间信任和支持程度来进行多传感器数据融合,以上方法均是先通过选取阈值来定义关系矩阵,再进行融合。此类方法在给定各传感器的支持界限值和选择有效数据方面受主观因素的作用较大,融合结果好坏很大程度上取决于参数值选取,因而,其结论不够稳定,影响了算法的稳健性。针对以上算法存在的问题,借鉴传统一致性融合实现步骤,并结合模糊理论和加权融合策略,通过置信距离、支持度函数和支持度矩阵的构建,本文构建了一种量测不确定下多传感器一致性数据融合算法。仿真实验结果验证了算法的有效性。
1 一致性数据融合方法
考虑下面多传感器量测模型

其中,i为量测系统中传感器编号,且i=1,2,…,N。x∈Rn为被估计系统的状态真值。zi∈Rm和vi∈Rm分别为第i只传感器的量测值和量测噪声,并假设vi为满足均值为零、标准差为σi的正态分布,且各传感器量测噪声不相关。ei为第i只传感器受到的外界扰动。考虑到工程应用中的实际情况,假设在N只传感器中,大多数传感器都是可靠的,即仅有少数几只传感器受到外界扰动,或含有疏失误差。为了检验传感器测量的一致性,引进置信距离测度用以比较各传感器的量测数据的一致性


2 量测不确定下多传感器一致性数据融合算法
分析以上基本一致性融合算法构建原理,发现其具体实现中存在以下问题:首先,置信距离测度可选取不同的距离定义形式,因此,不可避免将出现dij≠dji的形式,这与通常距离定义中对对称性要求是不一致的;其次,在确定关系矩阵R时,阈值εij确定需要采用专家知识或先验信息。再有,rij非1即0的构造方式损失了大量传感器量测间可利用的冗余和互补信息,尤其在传感器检测概率较低或外界随机扰动较大的情况,估计精度很难满足实际工程需求。基于以上分析,结合置信距离、模糊理论以及加权融合的思想,提出一种针对量测不确定的多传感器一致性数据融合算法。为了便于算法工程中的具体实现,下面给出算法流程。首先,不失一般性,考虑到量测向量具有高维特征且各分量属性之间的联系,引入能够有效度量向量数据间相似度的马氏距离评估两传感器量测数据间的置信距离

为对这种粒子间信息支持程度进行规范性量化,在dij基础上构建支持度函数ϑij。ϑij要求满足以下2个条件:1)与置信距离呈反比例关系;2)ϑij∈[0,1]使数据处理能够利用模糊集合理论中隶属函数的优点,从而避免量测信息一致性度量程度绝对化。基于以上考虑,支持度函数ϑij表达式选取为如下形式




其中,Θ =[δ1,δ2,…,δN]T,η =[b1,b2,…,bN]T。由置信矩阵的构建过程可知,S是一个对角线元素全为1的正定对称矩阵,且该矩阵中的其他元素均为小于等于1的正数。根据置信矩阵中元素自身特点和Perron-Frobenius定理:S存在最大模特征值λ,λ>0,且仅有该特征值对应特征向量中的元素全为正,并使得λη=Sη。结合公式(6)和等式传递原理,则Θ=λη,由于λ为不等于0的实常数,因此,Θ∝η。对η中的元素进行归一化处理得,向量中第i个元素即可作为描述粒子zi被系统中所有粒子综合支持程度的一致性权重wi。

在获得wi基础上,被估计系统状态可根据加权融合方式获取

3 仿真结果与分析
为检验该算法的可行性和有效性,仿真实验中对比了算术平均方法、加权最小二乘算法、基本一致性数据融合算法以及本文算法。被估计系统状态真值设定为50,量测系统中传感器数目、量测方差、检测概率基准值分别设定为20,10,0.8,不失一般性,仿真场景设定了算法实现过程中,外界扰动信息分别设定在泊松分布、高斯分布以及均匀分布条件下,传感器数目、传感器量测精度和传感器检测概率3个参数变化对算法滤波精度的影响。仿真结果如图1~图3。

图1 传感器数量对滤波精度的影响Fig 1 Effect of sensor quantity on filtering precision

图2 测量方差对滤波精度的影响Fig 2 Effect of measurement variance on filtering precision
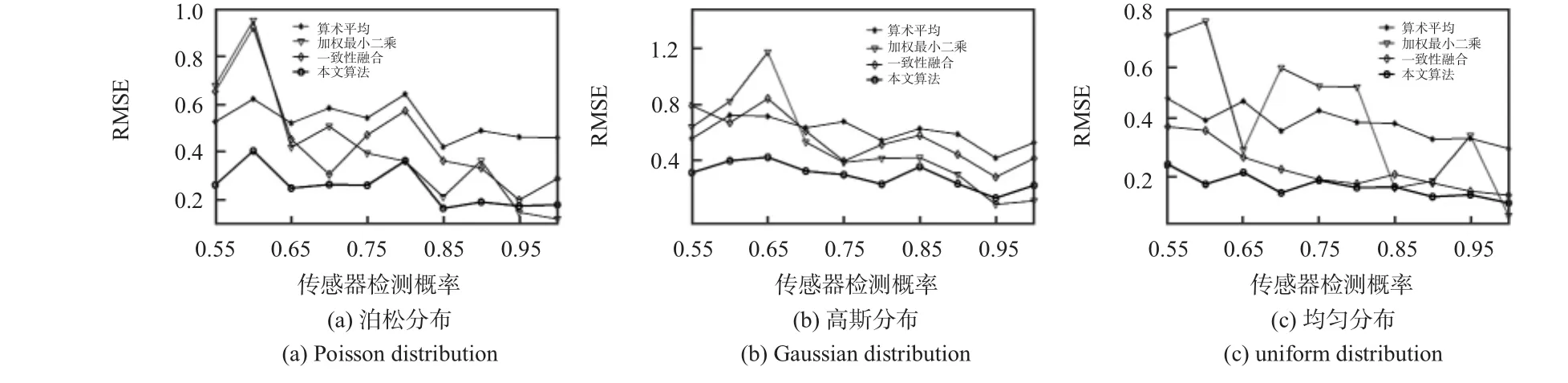
图3 检测概率对滤波精度的影响Fig 3 Effect of detecting probability on filtering precision
由图1仿真结果可以清晰看出:随着传感器数目增加,即对于系统状态量测信息量增强,4种算法滤波精度都获得了进一步的提升,而由于本文算法信息提取和利用得有效充分,其精度明显优于其他3种算法。由图2可以发现:随着传感器精度减弱,仿真实现中的4种算法滤波精度将趋于恶化,尤其是标准一致性融合算法甚至趋于发散状态,以上现象出现的原因与算法对数据二值判别和处理机制有关,在传感器精度变差条件下,大量数据由于无法满足数据选取的阈值条件而被剔除,无法实现对量测中冗余和互补信息合理利用。而由图3给出传感器检测概率变化对滤波精度影响可以看出:随着传感器检测概率提升,即量测信息量的增加,算法滤波精度均得到改善。另外,从4种算法在3种不同外界扰动情况下滤波结果可知,本文算法相对其他3种算法在可靠性和鲁棒性方面具有明显优势。
4 结论
多传感器在量测过程中由于多种因素的影响,量测数据中不可避免存在不确定的外界扰动信息。针对此类问题,本文提出一种量测不确定下多传感器一致性数据融合算法。仿真实验结果表明:与现有数据处理方法相比,该方法既能够控制多传感器量测数据中不确定的干扰,又能够实现对量测信息的合理利用。与现有处理方法相比,在滤波精度和鲁棒性方面均得到明显提升,并且算法具有物理意义清晰和实现简单的优点。
[1] Mahler R P S.Statistical multisource-multitarget information fusion[M].Boston,London:Artech House Publishers,2007:6 -36.
[2] 梁 彦,潘 泉,杨 峰,等.复杂系统的现代估计理论及应用[M].北京:科学出版社,2009:9-41.
[3] Wang C,Gao J H.High-dimensional waveform inversion with cooperative coevolutionary differential evolution algorithm[J].IEEE Geoscience and Remote Sensing Letters,2012,9(2):297-301.
[4] Modiri A,Kiasaleh K.Modification of real-mumber and binary PSO algorithms for accelerated convergence[J].IEEE Transactions on Antennas and Propagation,2011,59(1):214 -224.
[5] Zhong J,Fung Y F.Case study and proofs of ant colony optimization improved particle filter algorithm[J].IET Control Theory &Applications,2012,6(5):689 -697.
[6] Si H,Belacel N,Hamam H,et al.Fuzzy clustering with improved artificial fish swarm algorithm[C]∥International Joint Conference on Computational Sciences and Optimization,2009:317 -321.
[7] Lou R C,Lin M,Seherp P S.Dynamic multi-sensor data fusion system for intelligent robots[J].IEEE Journal of Robotics and Automation,1988,4(4):386 -396.
[8] 王婷杰,施惠昌.一种基于模糊理论的一致性数据融合方法[J].传感器技术,1999,18(6):50 -53.
[9] 刘敏华,萧德云.基于相似度的多传感器数据融合[J].控制与决策,2004,19(5):534 -537.
[10]王 林,张国忠,朱华勇,等.面向移动传感器网络的自适应一致性融合估计方法[J].上海交通大学学报:自然科学版,2011,45(3):383 -387.
[11]焦竹青,熊伟丽,张 林,等.基于信任度的多传感器数据融合及其应用[J].东南大学学报:自然科学版,2008,38(9):253-257.
[12]杨 佳,宫峰勋.基于贴近度的多传感器一致可靠性融合方法[J].传感器技术学报,2010,23(7):984 -988.
猜你喜欢
公民与法治(2022年5期)2022-07-29
中国毕业后医学教育(2021年3期)2021-12-02
中国毕业后医学教育(2021年3期)2021-12-02
教学考试(高考物理)(2021年5期)2021-11-08
中医眼耳鼻喉杂志(2021年1期)2021-07-22
陶瓷学报(2021年2期)2021-07-21
运动(2016年7期)2016-12-01
电测与仪表(2016年6期)2016-04-11
燕山大学学报(2015年4期)2015-12-25
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
