浅析PLC顺序控制梯形图的编程方法
2013-10-18 11:33:42张晓亮
科学之友 2013年6期
张晓亮
(潍坊科技学院,山东 寿光 262700)
根据控制系统的顺序功能图设计梯形图的方法,称为顺序控制梯形图的编程方法。顺序控制梯形图的编程方法都有三种结构,分别是单序列结构、选择序列结构和并行序列结构。下面以自动门控制系统为例,均采用选择序列结构分别对使用起保停电路的编程方法、以转换为中心的编程方法和步进梯形指令(STL指令)的编程方法进行介绍。
自动门控制系统的功能要求:人靠近自动门的时候,X0(感应器)为 ON,驱动电动机(Y0)高速开门,碰到开门的减速开关(X1)时,变为减速开门。碰到开门的极根开关(X2)时电动机停转,开始延时。若在0.5S内感应器X0检测到没有人,起动电动机(Y2)高速关门。遇到关门的减速开关(X4)时,改为减速关门,碰到关门的极限开关(X5)时电动机停止转动。在关门的期间若是感应器检测到有人,则停止关门,T1延时0.5S后会自动转换为高速开门。自动门控制系统的顺序功能图见图1。
1 使用起保停电路的选择序列结构的编程方法
图1中,M4之后有一个选择序列分支,当它的后续步M5、M6变为活动步的时候,M4应变为不活动步。这样就需将M5、M6的常闭触点与M4的线圈进行串联。同样的在M5之后也有一个选择序列的分支,外理的方法同上(见图2)。
选择序列的合并,若某一步的前面有有N条分支在这一步之前合并后进入该步,则代表此步的辅助继电器起动电路是由N条支路并联成的,各支路是由某一前级步的对应辅助继电器常开触点与其相应的转换条件的对应触点或电路串联而成。
图1中,步M1的前面有一选择序列的合并,当活动步为M0且X0转换条件满足时,或者M6为活动步,且T1转换条件满足时,步 M1都应该变为活动步,也就是控制 M1的起保停电路的起动条件应为M0和X0的常开串联电路与M6和T1的常开串联电路再进行并联(见图2)。
2 以转换为中心的选择序列结构的编程方法
如果某一个转换跟并行序列的分支/合并无关,那它的前级步与后续步都只有一个,需置位/复位的辅助继电器同样只有一个,故对选择序列的分支跟合并的编程方法实际上与对单序列的方法完全相同。每一个控制置位/复位的电路块都由前级步对应的辅助继电器常开触点跟转换条件的常开触点组成串联电路、一条SET指令和RST指令组成。

图1 自动门控制系统顺序功能图
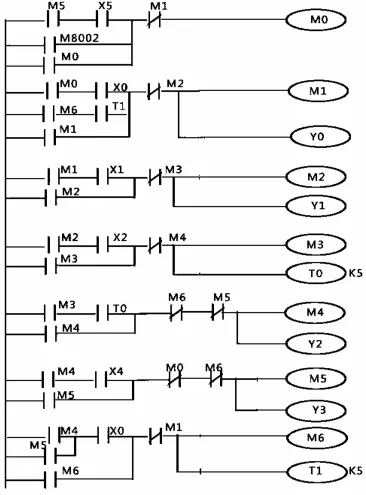
图2 自动门控制系统梯形图
3 步进梯形指令(STL指令)的选择序列结构的编程方法
3.1 选择序列分支的编程方法
步S23的后面有一个选择序列的分支。当S23为活动步时,若转换条件(X0)满足,则将转换到步S25; 若转换条件(X4)满足,则将转换到步S24。
如果某一步之后有N条选择序列的分支,则这步的STL触点开始的电路块中应该有 N条分别指明各转换条件和转换目标的并联电路。对于步S23的后面两条支路,有X4和X0两个转换条件,可能进入步S24和步S25,因此在S23的STL触点开始的电路块中有两条分别由X4和X0作为置位条件的串联电路。
3.2 选择序列合并的编程方法
步S20前有一个由两条支路组成的选择序列的合并。当S0为活动步,转换条件(X0)满足时,或者步S25为活动步,满足转换条件T1时,都使步S20变为活动步,同时将步S0或步S25变成不活动步。
在梯形图中,由S0与S25的STL触点驱动的电路块中都有转换目标S20,对它们后续步S20的置位是用指令SET实现的,相应的前级步的复位则是系统程序自动完成的。
在设计梯形图时,其实没必要特别的留意选择序列的合并如何处理,每一步的转换条件和转换目标只要正确地确定好,就自然地实现了选择序列的合并。
猜你喜欢
武汉广播影视(2022年6期)2022-12-28 06:38:12
科学与财富(2021年36期)2021-05-10 21:01:21
军民两用技术与产品(2020年8期)2020-09-07 13:37:18
成都工业学院学报(2017年2期)2017-06-28 14:23:15
小星星·阅读100分(低年级)(2017年6期)2017-06-17 11:05:26
电子制作(2016年15期)2017-01-15 13:39:28
制造技术与机床(2015年10期)2015-04-09 07:06:16
机电信息(2014年35期)2014-02-27 15:54:28
电子设计工程(2014年20期)2014-02-27 12:01:20
电工技术学报(2011年1期)2011-02-19 12:21:58