
一种海上测量雷达的海杂波模拟技术及实现*
2013-10-16 08:06乔铁英杨海清
舰船电子工程 2013年2期
乔铁英 杨海清
(海军91351部队 葫芦岛 125106)
1 引言
对于布设在舰船和海洋沿岸的测量雷达,其测量跟踪的目标大多处在海洋背景,海杂波的影响给雷达捕获与跟踪造成极大困难。为克服海杂波对雷达捕获跟踪的影响,就首先要对海杂波的性能与特性进行分析,通过研究模拟设计海杂波产生技术,设计实现一套能够模拟海杂波背景的雷达模拟器,为雷达抗海杂波技术研究提供技术基础。
2 海杂波特性分析
海杂波是表面分布过程[1~2],若假设覆盖区是矩形区域,则由雷达方程推导出实际雷达截面积σc和归一化雷达截面积σ0的关系为

设雷达天线波束宽度为B,矩形脉冲宽度为τ,入射余角为θ,观测海表面的距离为R,则在波束宽度有限的条件下Af为

而当脉冲宽度有限时Af为

归一化杂波后向散射截面积即杂波后向散射系数σ0与海况、极化、波长、入射角有密切的关系,海杂波散射系数近似模型为
式中:ss为海情级数(1~5级);φ为擦地角或入射余弦角;β=(2.44(ss+1)1.08)57.29,单位是rad满足:

其中:θc=arcsin(λ/4πhe);he≈0.025+0.04ss1.72,单位:m。
图1为不同海情下模拟仿真海杂波系数随入射余弦角变化趋势图。
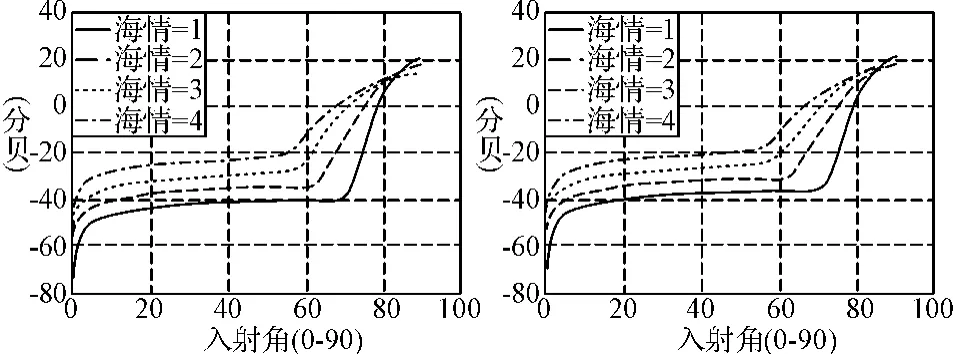
图1 模拟仿真海杂波系数图
3 雷达海杂波模拟
常用的雷达杂波分布模型有Rayleigh分布[3]、Log-normal分布[4]、Weibull分布[5~6]和 K 分布[7~8]。本文采用Weibull分布和相参K分布。
3.1 相参 Weibull分布[5~6]

式中,ρ为形状参数,表示分布的倾斜度;γm为尺度参数,表示分布的中位数。
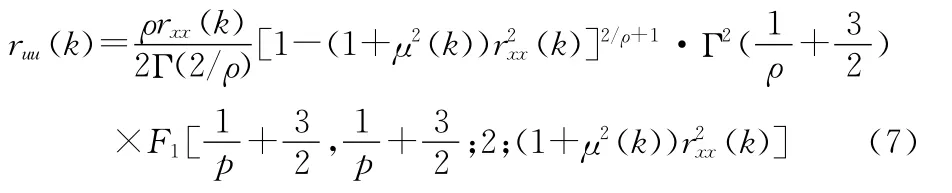
3.2 相参 K 分布[7~8]

式中,υ为形状参数,υ越小,分布的不对称性越明显,与瑞利分布的偏差越大。υ一般在0.1~10之间变化;当υ=∞时,为瑞利分布。
α为尺度参数,仅与杂波的平均值有关;
W=x+jy为一相关复高斯序列,将其与平稳随机序列S(均方根为1)相乘得到复K分布随机变量Z=u+jυ,其中S服从归一化的χ分布,其概率密度函数为

海上测量雷达有宽脉冲和脉冲串两种工作方式[5]。根据上述几种杂波分布模型的特点,对于高分辨率雷达小波束入射角情形,采用Weibull分布和K分布。K分布能较好拟合海杂波数据的幅度起伏特性,但是由于无法找到杂波非线性变换前后相关函数的非线性关系,只能采用SIRP法进行模拟,但SIRP法计算量非常大,且不易形成快速算法。因此,对于海上测量雷达,宽脉冲工作方式时采用基于ZMNL方法的Weibull杂波分布模型模拟方法,脉冲串工作方式时采用基于SIRP法的K分布模型杂波模拟方法,能够较好的实现海上测量雷达的杂波模拟要求。
4 雷达杂波模拟器设计与实现
4.1 硬件设计
图2为模拟器总体设计框图,包括控制计算机、中频目标信号支路、视频目标信号支路、杂波信号支路等。

图2 雷达模拟器总体设计框图
1)控制计算机
采用分布式控制结构,嵌入式计算机通过三块控制接口板连接到中视频信号产生支路。每块控制接口板由一片PCI控制器、一片FPGA芯片和一组驱动芯片组组成,每个信号支路作为控制接口板的局部总线设备,均可以被嵌入式计算机通过PCI总线控制器直接访问到。
2)中频目标信号支路和中频多路径反射信号支路
中频目标信号支路和中频多路径反射信号支路硬件结构相同,包括八个信号产生单元,每个信号产生单元具有相同的结构如图3所示。中频目标信号支路产生嵌入式计算机调度分配给本支路的多个中频信号。中频多路径反射信号支路模拟产生二次多路径反射的中频信号。
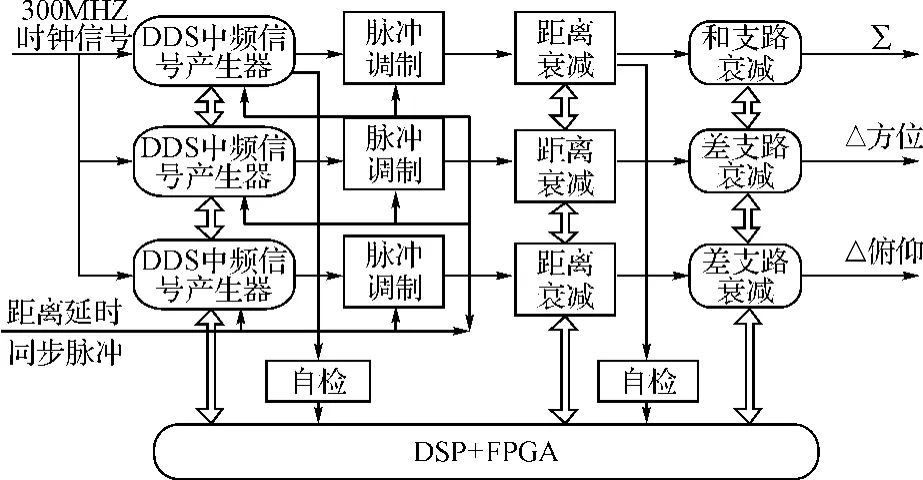
图3 中频信号产生单元实现框图
3)视频目标信号支路和视频目标多路径反射信号支路
视频目标信号支路和视频目标多路径反射信号支路共六个信号产生单元(图4),具有完全相同的硬件结构。信号产生单元采用“双DSP+FIFO+双口RAM的结构方式,DSP是整个模块单元的处理和控制中心,DSP通过双口RAM接收控制计算机发送过来的控制命令和相应的参数,提前一个雷达脉冲重复周期来计算包络波形,输出结果存于FIFO中,在时延脉冲到来时读取至DAC,最终生成视频雷达目标回波信号。
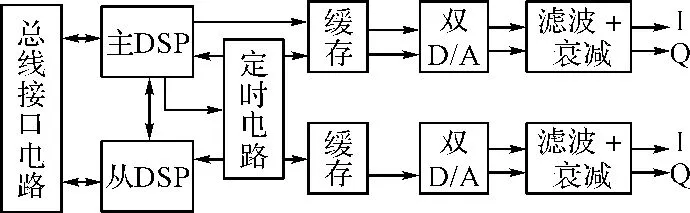
图4 视频信号产生单元实现框图
4)杂波信号支路
杂波信号支路设计采用预处理和实时处理相结合的办法。主要工作是:
(1)根据设置的杂波形式和杂波参数,由支路DSP产生视频杂波,并完成幅度调整和相位调整量的计算;
(2)由支路DSP完成对DDS、幅度衰减器的控制,产生频率、幅度、相位满足要求的连续中频信号;
(3)用视频杂波调制连续中频信号,产生一定距离段上的中频杂波信号;
(4)将视频杂波输出,用以和视频目标信号合成。
4.2 软件设计
雷达动目标模拟器软件设计主要完成杂波信号模拟,包括控制计算机完成的杂波参数设置软件和DSP完成的杂波实时调度输出软件。
1)控制计算机杂波参数设置软件
杂波参数设置软件采用面向对象方法设计,杂波参数设置包括杂波类型、杂波频谱、杂波区域、杂波分布等杂波相关参数以及雷达平台、雷达发射频率、雷达发射波形等雷达相关参数。其示意图如图5所示。
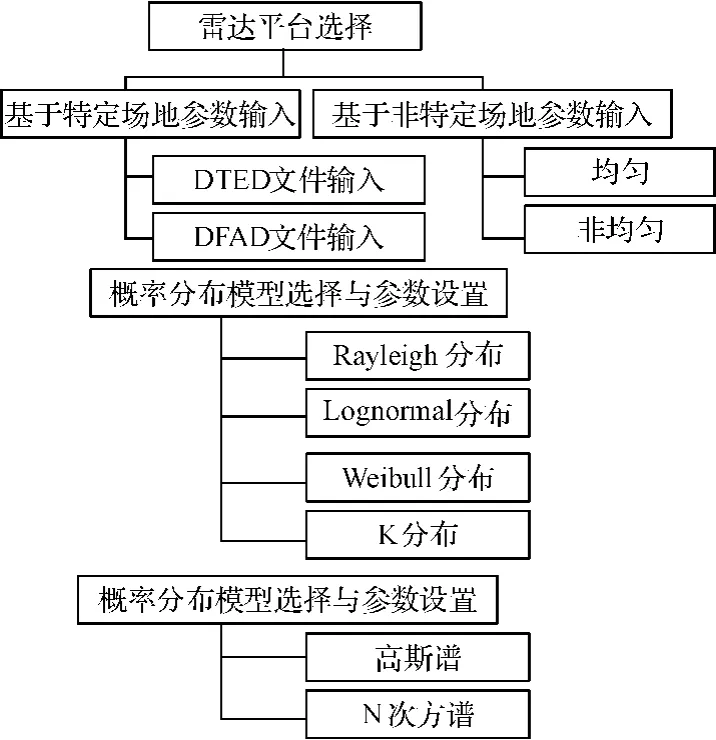
图5 杂波主要参数设置
2)数字信号处理(DSP)软件
DSP软件担负着与嵌入式计算机通信、计算目标回波信号的参数、生成配置DDS的数据、以及计算信号衰减等任务。

图6 波形计算子函数的程序流程
中频支路DSP的主程序主要完成的任务是:数据初始化、目标数据接收、判断条件以调用不同程序模块、判断是否有中断请求。针对不同的信号波形,编写相应的子函数,在信号生成时,调用符合条件的子函数,以计算信号的各种参数。要描述一个回波信号,需要确定的因素有:信号幅度、角频率以及相位。从这个原理出发,各波形子函数编写的总体思路都是一样的。图6为波形计算子函数的程序流程。
5 结语
通过雷达海杂波特性分析和海杂波模拟技术研究,根据海上测量雷达工作方式以及低入射角和2~3级海情等使用特点,宽脉冲采用Weibull分布,脉冲串采用相参K分布,建立海杂波模拟数学模型,能够较好的模拟真实背景下的海杂波。应用此数学模型进行雷达模拟器设计,满足了海上测量雷达的相关需求,这在实践中已得到成功应用。
[1](美)M.W.朗.陆地和海面的雷达波散射特性[M].薛德镛,译.北京:科学出版社,1981:15-40.
[2](美)Merrill.Skolnik.雷达系统导论[M].北京:电子工业出版社,2006:24-53.
[3]Conte E,longo M,lops M.Modeling and simulation of non-Rayleigh radar clutter[J].IEE Proceeding F,1991,138(2):121-130.
[4]Rangaswamy.m,Weiner.D,Ozturk.A.Computer generation of correlated non-Gaussian radar clutter[J].Aerospace and Electronic Systems,IEEE Transactions,1995,31(1):106-116.
[5]宁汀汀,谢亚楠.相参相关Weibull分布海杂波建模与仿真[J].上海航天,2007,58(4):58-61.
[6]姜斌,和湘,黎湘,等.一种改进的 Weibull分布杂波仿真方法[J].中国工程科学,2007,9(1):44-48.
[7]杨俊岭,吕韶呈,万建伟.一种新的相干k分布模型及其在海杂波仿真中的应用[J].系统仿真学报,2007,19(2):250-253.
[8]赵建军,肖雄波,杨利斌.基于AR模型和ZMNL变换的K分布海杂波仿真方法[J].计算机与数字工程,2011,39(8).
[9]张宝宝,胡艳辉,罗丰,等.相关K分布海杂波的建模与仿真[J].现代雷达,2007,29(4):24-27.
猜你喜欢
西安石油大学学报(自然科学版)(2022年5期)2022-10-08
科学与信息化(2021年30期)2021-12-24
北京航空航天大学学报(2021年9期)2021-11-02
今日农业(2021年15期)2021-10-14
雷达与对抗(2020年2期)2020-12-25
火控雷达技术(2020年2期)2020-10-16
中国交通信息化(2019年2期)2019-03-25
电机与控制学报(2018年9期)2018-05-14
科技与创新(2017年7期)2017-05-13
汽车维修技师(2016年11期)2016-05-05
