
基于视觉检测的直角坐标机器人精度分析
2013-10-15 01:20董冠华胡晓兵殷国富
制造业自动化 2013年15期
董冠华,胡晓兵,殷国富,周 飞
(四川大学 制造科学与工程学院,成都 610065)
0 引言
随着技术的不断进步,机器人技术越来越多融入到了当今制造业,直角坐标机器人作为机器人的一种重要组成部分,凭借着其结构紧凑、强度高、运动简单及无奇异状态等优点,广泛应用于焊接、码垛、包装、检测、装配及包装等领域[1]。
不同的工况条件和作业需求对于机器人精度有着不同的要求,在设计开发机器人平台过程中,对机器人的精度设计也成为工作中的重中之重。基于课题需要,针对高精度、低负载、高速度的作业需求,本文设计开发了一套悬臂式直角坐标机器人。根据经验,动作过程中Y轴(悬臂部分)因负载而产生的形变会直接影响到机器人末端执行机构的动作精度。目前,设计人员往往只通过对Y轴线性模组(简称模组)简化模型进行有限元分析,并根据有限元分析的结果做进一步的设计分析。实际上,简化模型与实际样机之间存在一定的误差。本文结合人工视觉技术,针对两者之间的误差进行了研究,为后续的设计开发提供了理论依据。
1 机器人平台与实验原理
本文所设计开发的悬臂式直角坐标机器人,主要由X、Y、Z轴向模组与末端执行机构组成。机器人具有四个自由度:X、Y、Z轴向的移动和功能部件的X向旋转。其中,X轴模组固定于基座,Y轴模组为悬臂结构,通过连接块与X轴滑台相连,Z轴模组固连与Y轴模组滑台。所设机器人的额定负载为5kg,定位精度为±0.05mm。
实际工作中,所设计直角坐标机器人 X轴模组与基座固连,Z轴模组主要受轴向拉力作用,对机器人平台的精度的影响较小;Y轴模组为悬臂结构,因受重力和外部载荷作用形变量最大,且对机器人平台的精度影响最为严重。因此,机器人平台的最终精度很大程度上取决于Y轴模组的形变大小,在精度设计时也必须对悬臂结构的Y轴模组的刚度进行校核。
本文在精度设计分析的过程中,对Y轴模组进行建模,并根据结构尺寸将之简化为壳体结构进行有限元分析,根据分析结果进行进一步的设计计算。同时,本文在物理平台上结合机械视觉技术,对该种根据简化模型分析的结果对机器人精度设计的方法进行验证。同时,为保证视觉实验数据的准确性,本文基于实验室直角坐标机器人平台进行改造,去除Z轴模组和末端执行机构,将工业摄像头加装在Y轴末端。最终通过分析结果与机械视觉标定量的比较,验证该种设计分析方式的可行性,并探讨其适用范围。
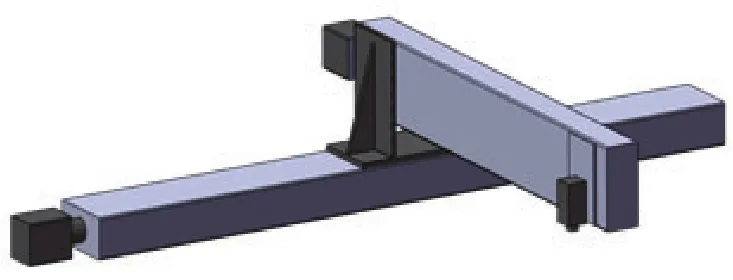
图1 机器人实验平台示意图
2 基于Ansys workbench的有限元分析
2.1 Y轴模组的结构形式与简化模型
所设计机器人的模组主要有传动部分和支撑部分组成,传动部分主要包括滚珠丝杆、滚珠导轨与滑台,支撑部分主要是指模组的成型壳体。理论上讲,传动部分的功能只是完成动力的传递和运动方式的转化,所有的外部载荷都应由支撑部分承担。实际工况中,传动部分的存在也一定程度上提高了模组的整体刚度,承载了一小部分的外部载荷,但绝大多数的外部载荷仍然是由支撑部分的成型壳体承担。基于以上分析,本文为方便分析和减少分析数据量,将实际为多部件的装配体简化成简单的壳体结构,并对之进行有限元分析。
2.2 有限元分析流程
根据有限元分析流程:建立简化模型;将模组材料指定为A l-6061(如表1所示);网格化处理时保证壳体的层厚方向上单元层数至少为2;约束也施加载荷方式:将一段施加固定约束,另一端施加外部集中载荷(10-100N区间10N间隔施载),同时激活标准引力作用。定义以上相关数据之后,通过求解器运算求解[2]。
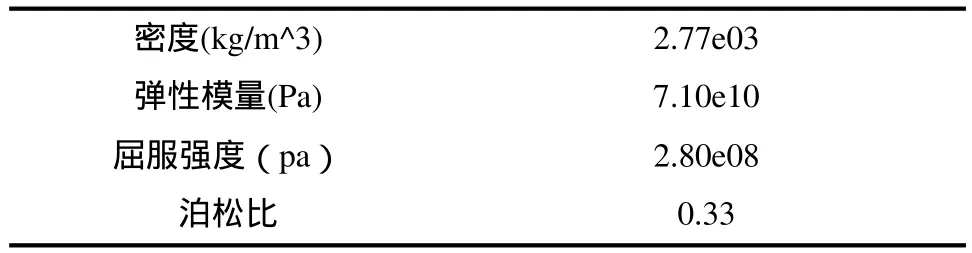
表1 材料属性

图2 网格划分
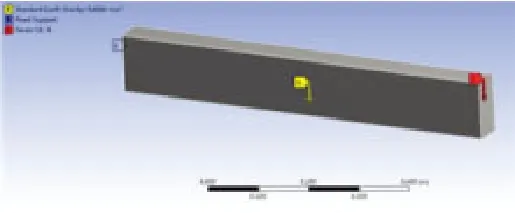
图3 施加边界条件
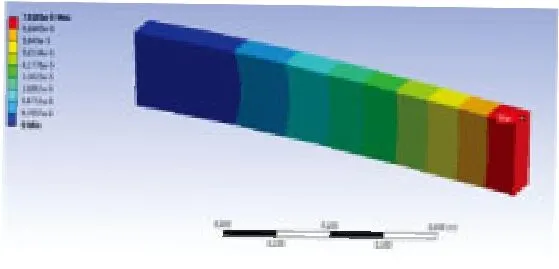
图4 分析图解
2.3 分析结果汇总
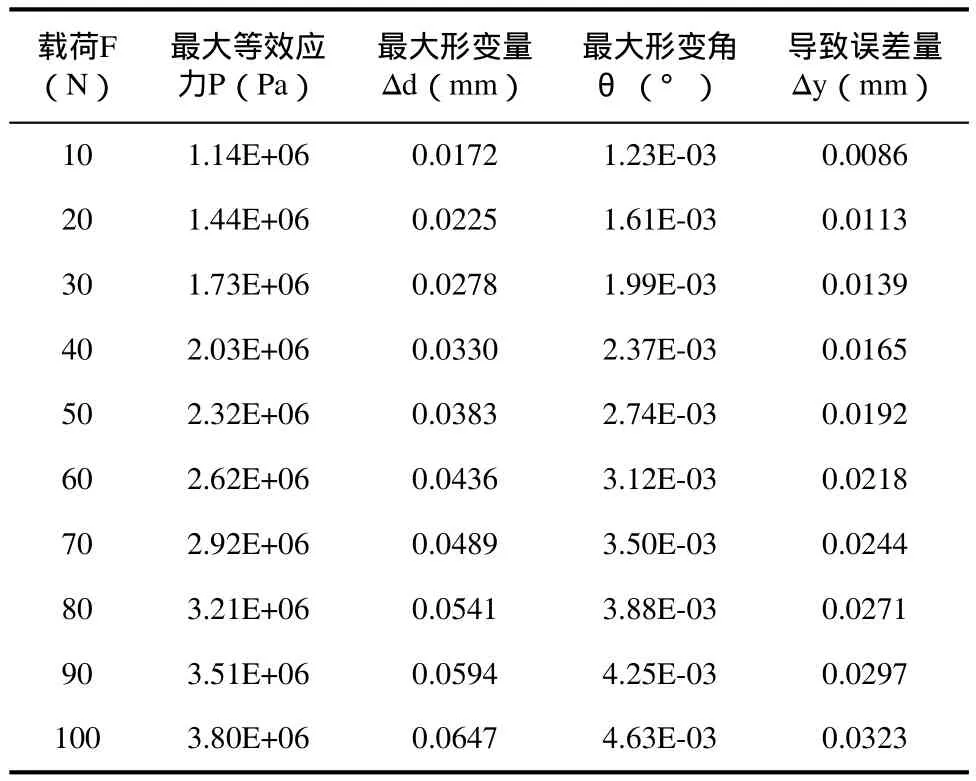
表2 有限元分析结果
3 基于机械视觉的实验
3.1 图像获取
实验平台中,将Basler工业相机加装与Y轴模组末端,并通过1394接口数据线与其嵌入PC机的采集卡相连,实现对图像的获取和采集。

图5 硬件设备
为减小偶然误差对实验的影响,在数据采集时,针对每个不同载荷,每次采集取五个样本,在后续处理中将该五个样本的特征信息作为所属载荷下的有效数据。
3.2 图像处理
通过相机所获取图像的质量难免会受到外界因素的影响,为保证所测得的实验数据的准确性,需对图像进行相应的处理。Labview为用户提供了形状匹配、边缘检测、图像锐化、图像增强、形心坐标等相关功能的VI,用户只需要在图形化编程的界面选取相关的VI,通过导线相连,并控制每个V I的相关参数,即可以完成图像的处理。具体操作步骤此处不做赘述[3,4]。
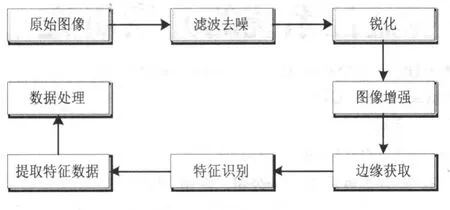
图6 图像处理流程
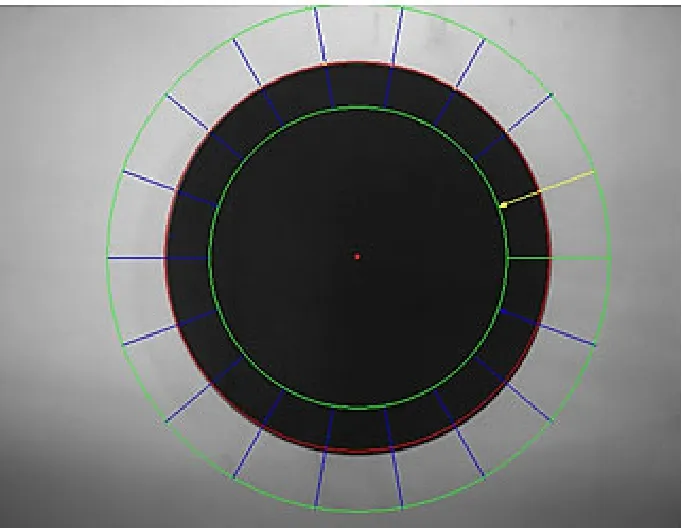
图7 图像特征识别
3.3 实验数据
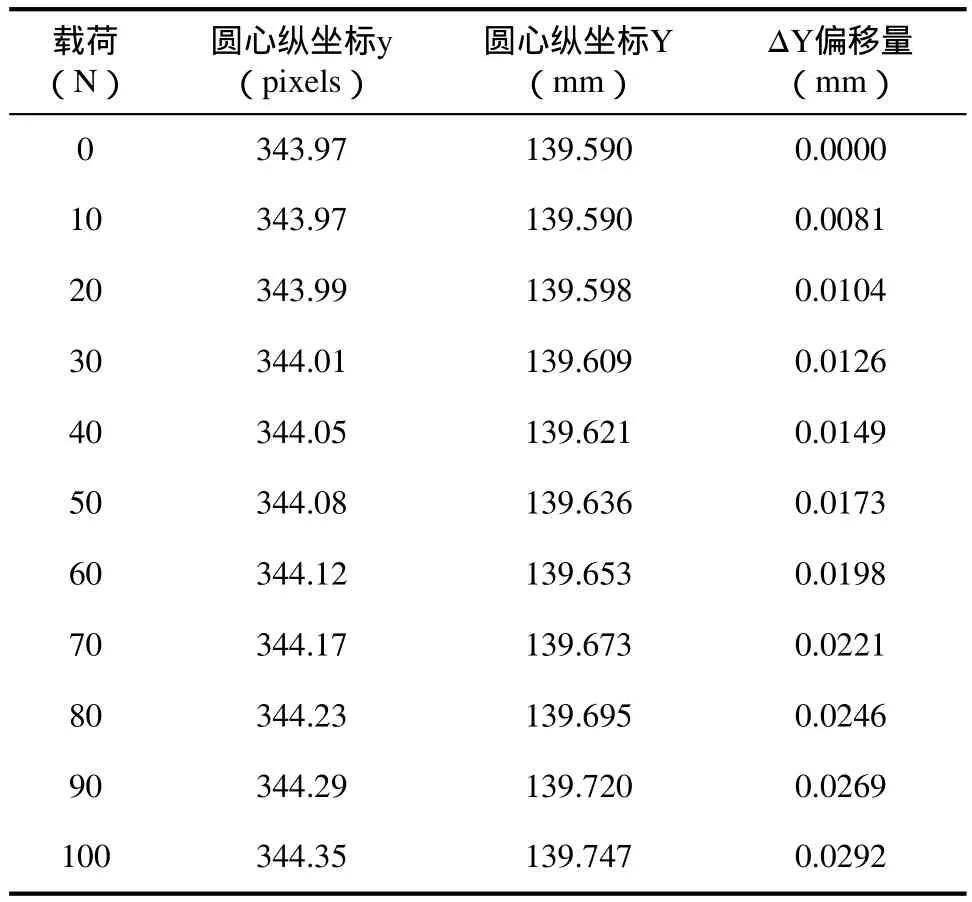
表3 实验数据
4 结论
根据有限元分析和实验测量的数据可以得到以下走势图,如图8、图9所示。
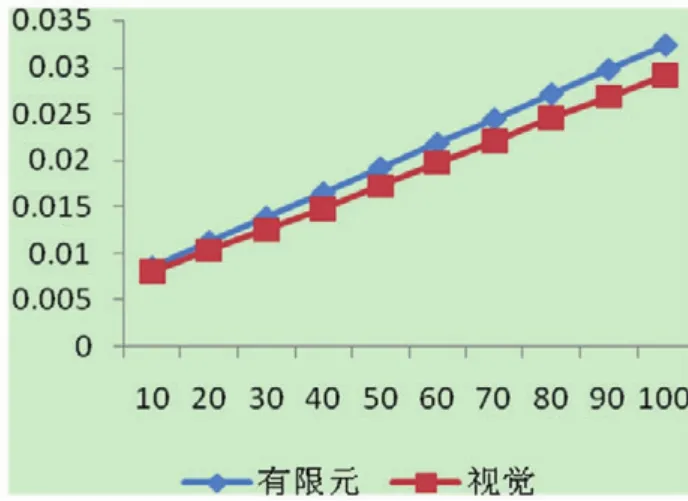
图8 误差走势图
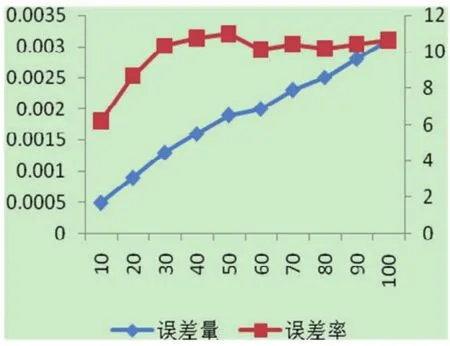
图9 相对误差量与误差率
结合以上两幅图解,对比分析两种方式所得到机器人因Y轴模组形变而产生的定位精度的误差,不难得到以下结论:
1)悬臂式直角坐标机器人基于Y轴模组简化模型的有限元分析结果进行精度设计的方式是可行的,且与分析结果与实际误差量拟合程度较高;
2)随着外部载荷的增加,因Y轴模组形变而产生的定位误差量也逐渐变大,且误差率也随着增大,并最后稳定于10%左右,该值对于通过有限元分析进行精度设计的修正具有一定参考意义。
[1] 于锋钊. 基于ANSYS的龙门式直角坐标机器人横梁分析[J].机械设计与制造,2008年,5期.
[2] 许京荆等.ANSYS 13.0 WORKBENCH数值模拟技术[M].北京:2012.
[3] 裴忠发等.基于LabVIEW的机器视觉实现[J].机电工程,2002年,4期.
[4] 朱虹等.数字图像处理技术及应用[M].北京:2011.
猜你喜欢
中学生数理化·七年级数学人教版(2022年4期)2022-04-26
中学生数理化·七年级数学人教版(2022年4期)2022-04-26
中学生数理化·七年级数学人教版(2021年4期)2021-07-22
房地产导刊(2020年8期)2020-09-11
电子技术与软件工程(2019年17期)2019-10-09
电子制作(2019年12期)2019-07-16
中国特种设备安全(2019年3期)2019-04-22
中国交通信息化(2018年5期)2018-08-21
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
电子制作(2018年8期)2018-06-26
