
基于图像识别的车框定位技术
2013-10-14 06:55唐萍李春燕朱志鹏
机械制造与自动化 2013年2期
唐萍,李春燕朱志鹏
(智达电力自动控制有限公司,四川成都 610062)
0 引言
图像识别技术已经广泛应用于各种领域,它与其他技术领域进行相互渗透,使得该领域的研究具有综合性,至今还没有形成统一有效、广泛应用于所有图像识别的理论[1]。因此,各种思维方式都可以融入其中进行探索式研究,虽然不能做到“放之四海皆准”,却也能在某些方面某些领域绽放光彩。
假如需要检测运输车辆的货物装载情况,如图1所示,需要一套智能设备自动定位到停放车辆的正上方。这就可以运用图像识别技术识别出车框的具体位置,为智能系统提供定位依据。
图1 待测车辆原始图像
1 车框识别与自动定位的原理
图2 图像识别的目标
2 车框识别技术的实现
图像识别技术一般都是基于位图进行处理的,这里所说的位图是指具有设备无关位图(device-independent bitmap,DIB)结构的 WINDOWS 标准格式位图[2]。
在装载位图后,图像识别一般按照格式修正、预处理、轮廓定位和识别输出的步骤进行。图像识别的宏观流程虽然比较一致,但由于具体的识别对象不同,应用的识别方法也不尽相同。
2.1 生成灰度图
从摄像头捕捉的视频图像生成的位图通常是24位真彩色位图,真彩色位图没有调色板,1个像素占3个字节,处理起来非常不方便,而8位灰度图1个像素占1个字节,数据量小,单字节处理非常灵活。对于图像识别技术来说,各种处理算法一般是针对8位灰度图而言的,因此位图处理的先行步骤往往是灰度图变换。
该问题的难度在于如何在214种颜色中选出28种颜色作为转换后的位图颜色,并且使得图像不失真。当前经典的一些算法有合并法和分裂法等,还有最大概率法和八叉树法[3]。一般先得到8位伪彩色图,再转换成8位灰度。这些算法实现起来非常复杂,因此考虑其他简易办法实现24位真彩色图直接转8位灰度图。
灰度变化没有统一的标准,比较常用的变换依据是按照三原色对亮度影响的比值来确定的,即:

将24位真彩色位图的各个像素对应的3个分量数据转换成调色盘中对应的亮度索引,位图数据量缩小至1/3。
2.2 灰度图强化处理
灰度的强化处理是为了增强图像的对比度,增强特征,在此以线性变换法来实现灰度的强化[4]。令原图的f(i,j)的灰度范围为[a,b],线性变换后的图像 g(i,j)的灰度范围为[c,d],如图3所示,g与f之间的关系式为:

图3 线形变换原理
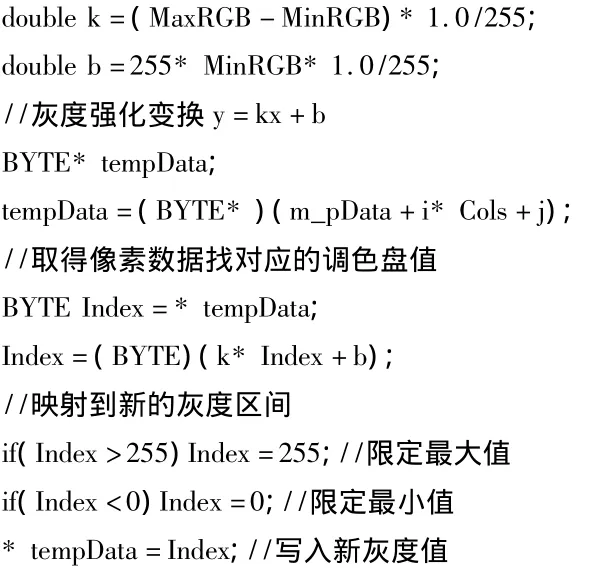
将原灰度图的灰度域从[MIN,MAX]映射到[0,255]空间,核心算法如下:
2.3 图像平滑处理
图像的平滑处理是一种实用的数字图像处理技术,主要目的是为了减少图像的噪声。一般情况下,在空间域可以采用邻域平均法来减少噪声。
平滑处理基于平滑模板的思想通过一个点与周围几个点的运算来去除突然变化的点,从而滤掉一定的噪声,但图像一定程度上会模糊化,而减少图像的模糊代价是图像平滑研究的主要问题之一。新像素灰度g(x,y)与原像素灰度f(i,j)之间的关系满足关系式:

其中:k(i,j)表示该像素的权重,一般情况下M=∑k(i,j),S表示以(x,y)为中心的邻域内的像素坐标集合。
若取各权值为常数k(i,j)=1/M,S半径为T,取M=(2T+1)2,则式3可写为:

为了减少这种效应,采用阈值法对平滑算法进行改进:
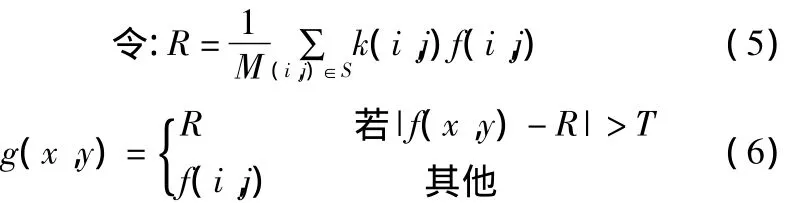
T是一个规定的非负阈值,当平滑后的灰度没有超过T,则保留原来的灰度。经过这种处理后,减小了图像的模糊程度,平滑效果仍然很好。
一般情况下通过选择不同的模板来消除不同的噪声。常用的模板有:

各模板中带黑点的元素表示是中心元素,即该元素是需要进行处理的像素。其他元素表示与该像素相邻的像素,数值表示权重。
经过实际验证比对,待测车辆图像在第三个模板的平滑下,取阈值T=15效果比较理想。对于边界像素,它的临域没有8个像素的时候,不改变原来的灰度值。
图4给出了平滑处理前后的灰度直方图,横坐标表示灰度级,纵坐标表示该灰度的出现频率(像素个数)。
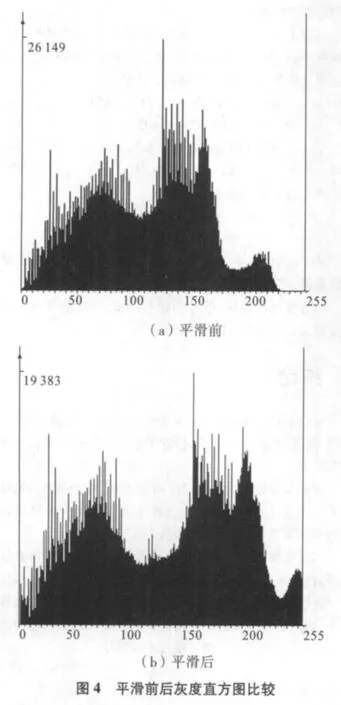
从图4(a),(b)可以看出,平滑处理后的灰度变化更平稳,灰度的覆盖面扩大,因此说明平滑处理达到了去除噪声的效果。
经过平滑处理后的车辆图像如图5,背景特征仍然存在,但注意到顶层货物图像呈现出特征黑点区域。下一步就可以考虑提取黑点区域。
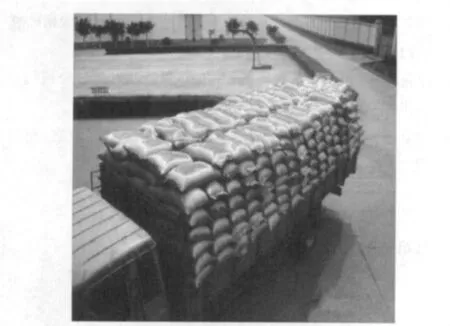
图5 平滑后的车辆图像
2.4 图像锐化处理
图像锐化处理的目的是使模糊的图像变的清晰起来。模糊的实质是图像受到了平均或积分运算造成的,因此可以对图像进行逆运算如微分运算来使图像清晰化。
一种实用的微分锐化方法:梯度锐化法。
设图像为 f(x,y),定义 f(x,y)在点(x,y)处的梯度向矢量=f(x,y[ ])为:
梯度的两个重要性质:
1)梯度的方向在函数f(x,y)最大变化率方向上;
2)梯度的幅度用G[f(x,y)]表示,其值为:

由式(8)得出结论:梯度的数值就是f(x,y)在其最大变化率方向上的单位距离所增加的量。
对于离散图像,式(8)可写为:

如果直接采用梯度值 G[f(x,y)]来表示图像,即g(x,y)=G[f(x,y)],则由上面的公式可见:在图像变化缓慢的地方其值很小(对应于图像较暗),而在线条轮廓等变化较快的地方的值很大。图像在经过梯度运算后使轮廓清晰从而达到锐化目的。
但是,由于在图像变化缓慢的地方梯度很小,所以图像会很暗,通常的做法是给定一个阈值Δ,由梯度与Δ的大小关系再决定新图像。在此列举四种常见的Δ处理关系式:

即大于Δ的采用梯度值,否则保留原值。Δ值取适当,则图像明暗效果较好。

即大于Δ的采用固定灰度值,否则保留原值。La是一个非负固定灰度值。这样的结果是轮廓边缘是相同级别的灰度。

即大于Δ的采用梯度值,否则统一采用固定灰度值。Lb是一个非负固定灰度值。这样的结果是背景成为相同级别的灰度。

即大于Δ的采用统一的轮廓边缘灰度级别,小于Δ的采用统一的背景灰度级别。如果Δ适当,这样的结果是直接呈现轮廓,方便边缘研究[6]。
本文研究的待测车辆的图像非常复杂,图1中可以看到它的背景不具有单一性。如果提取图像轮廓,则所有具有边缘变化的轮廓都会呈现出来,但这些图像的轮廓对最终确定“中心点”的目标并没有什么实质意义。
经过实际操作,利用式(13),取适当的Δ阈值,目的不是为了提取轮廓,而是为了屏蔽背景和车辆的无关图像,从而提取顶层货物的单一图像,如图6。

图6 锐化图像及中心点提取
锐化处理核心算法如下:
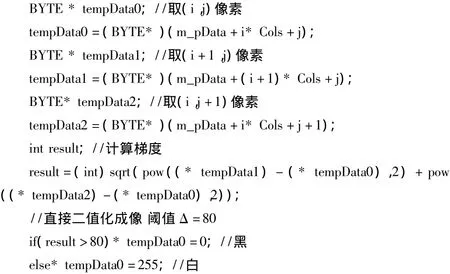
在实际成像过程中当Δ>75后,成像不再有明显的变化。
2.5 提取中心点
如果能够用一个类似矩形的边框来锁定图像的边界,那么该边框的对角线连线的交点就是目标任务的中心点。
确定这个边框的问题又可以进一步转化为寻找四个边界点。然而四个边界点并不能单纯的查找如“最靠左的黑像素,最靠上方的黑像素”等等,因为从锐化后的图像可以看出仍然有一些孤立的点存在,使得最靠左的黑像素并不是图像真正的左边界点,最靠上的黑像素也不一定是真正的图像上边界点等等。
对于这个问题,并不能从某个理论中找到处理依据,因此具体问题具体分析。以找左顶点为例:
1)从左到右,从下往上查找。设置默认左顶点LP为(1 600,0),如果某点为黑像素,则以该点为基准进行后续步骤;
2)统计该点所在行且位于该点之右的黑像素个数TotalCount,统计该点所在行且在20个右像素邻域内的黑像素个数DomainCount;
3)如果同时满足TotalCount>30,DomainCount>5则认为左边界点可能已经找到,比较该点的与LP的x坐标,如果本次找到点的x坐标更小,则设置该点为LP。结束本行的搜索,进入下一行搜索。
该思路可以屏蔽掉那些孤立点对边界点查找的影响。最后将满足这些条件的所有点中x值最小的作为左顶点。其他边界点同理。
假设上下左右四个边界点(分别为TP,BP,LP,RP)已经找到,则上下边界点连线的方程为Y=k1X+b1,左右边界点连线的方程为:Y=k2X+b2其中:
则两直线的交点为:

Mid.x为中心点的像素横坐标,Mid.y为中心点的像素纵坐标,实际取值时候需要圆整。
为方便显示特征,最终图像见图6,用线条将对角线连接起来,以便突出中心点。
3 结论
为识别车框中心位置,本文设计了位图装载,灰度图生成,灰度增强,平滑处理,梯度锐化和中心点提取六个步骤来实现。
对于本文提出的车框定位问题,梯度锐化步骤走轮廓成像的路线并无多大意义。因此本文提出了一种梯度锐化的特殊用法,得到了更有用的图像信息。
其次也提出了一种基于邻域像素统计的边界点查找算法,针对本文的研究对象行之有效。
该项车框定位技术已经运用到运输车辆货物检测领域中,如果适当改进还能运用到自动装填货物的智能设备中,以及其他类似的车辆定位技术领域中。
[1]罗亚玲,邓韧,周绍骑.图像识别关键技术[J].后勤工程学院学报,2001(3):52-56.
[2] David J.Kruglinski,Scro Wingo,George Shepherd.Programming Visual C++6.0[M].北京:北京希望电子出版社,1999.
[3]张士杰,潘国荣.真彩色位图转换为一般位图的两种方法[J].铁路航测,2001(4):9-11.
[4]邸慧,于起峰,张小虎.一种基于灰度变换的红外图像增强算法[J].应用光学,2006(1):12-14.
[5]李俊生.一种图像平滑处理方法的空域算法和频域分析[J].常州工学院学报,2004(2):30-33,40.
[6]沈庭芝,方子文.数字图像处理及模式识别[M].北京:北京理工大学出版社,1998.
猜你喜欢
测绘学报(2021年11期)2021-12-09
激光技术(2021年5期)2021-08-17
电脑报(2020年12期)2020-06-30
电子制作(2019年16期)2019-09-27
电脑报(2019年4期)2019-09-10
中国交通信息化(2019年4期)2019-07-13
电子制作(2018年19期)2018-11-14
电子制作(2018年14期)2018-08-21
少儿美术·书法版(2016年1期)2016-02-06
大众摄影(2015年9期)2015-09-06
