
干扰条件下反舰导弹导引头伺服系统研究
2013-10-13 07:59吴忠德尚永爽孙伟超
舰船电子对抗 2013年5期
吴忠德,尚永爽,孙伟超
(1.海军航空工程学院,烟台264001;2.解放军94973部队,杭州310021)
0 引 言
反舰导弹导引头伺服系统是反舰导弹系统的重要组成部分,它的精度直接影响到反舰导弹的制导精度[1-2]。它通过测量反舰导弹与舰船目标之间的目标角误差信号,利用导引头伺服系统控制回波天线向着消除目标角误差的方向旋转,进而实现导引头对舰船目标的跟踪,使得反舰导弹可以准确地攻击舰船目标。
通常情况下,反舰导弹导引头采用单脉冲测角技术。由于弹载设备体积受限,导引头测角系统的角分辨力和抗角度干扰的性能较差;导引头接收机的输出信号是一个迭加有热噪声、干扰及杂波的目标回波信号[3-4];同时,闪烁干扰也是一种对抗反舰导弹的有效干扰方式,它通过若干个在角度上不能分辨的干扰源相互配合,使导引头产生很大的测角误差。以上噪声干扰和角闪烁干扰等跟踪误差会使反舰导弹导引头丢失舰船目标,导致反舰导弹脱靶。所以研究反舰导弹导引头伺服系统具有重要的作用和意义,它决定了导引头能否快速地发现目标、平稳地跟踪目标和准确地测量目标位置参数。
本文利用Simulink软件对反舰导弹导引头伺服系统的建模和仿真进行研究。首先根据导引头伺服系统结构,在干扰条件下对导引头角稳定回路、角跟踪回路和角预定回路进行分析,建立导引头伺服系统数学模型;为提高导引头抗干扰能力,在角跟踪回路中引入Kalman滤波器,通过滤波可以为系统提供精确的目标数据;然后结合工程实际,构建导引头伺服系统的Simulink[5]控制模型,并进行动态仿真分析;最后得到系统的响应速度和跟踪精度等动态响应结果。
1 导引头伺服系统结构
导引头伺服系统是一个多参数调整、多回路反馈控制系统,如图1所示。在反舰导弹导引头伺服结构中,目标跟踪的信息处理具有相当重要的意义。在复杂的战场环境下,反舰导弹导引头通过所获得的舰船目标回波信息消除噪声干扰和目标角闪烁干扰等跟踪误差的影响,获取真实的舰船目标回波信息;然后根据真实目标回波信息准确地估计目标的距离、速度和角度,提供给反舰导弹制导控制系统,以引导导弹精确打击目标。
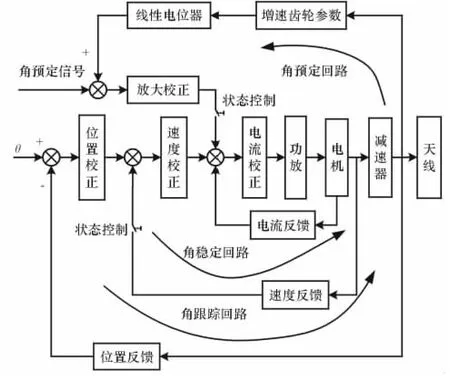
图1 导引头伺服系统结构图
导引头伺服系统主要完成角稳定回路、角跟踪回路和角预定回路3种工作状态。其中,角稳定回路工作状态主要功能为利用跟踪角误差信号去控制回波天线向着消除目标角误差的方向旋转,进而实现跟踪目标角度上的稳定;角跟踪回路工作状态主要功能是为导引头伺服系统提供良好的动态角跟踪性能,确保导引头能够对强机动目标具有较高的精度和较好的稳定性;角预定回路工作状态主要功能是为精确控制回波天线指定预定方向,保证反舰导弹导引头能够准确截获目标[6]。
导引头伺服系统是按照误差控制的闭环控制原理而设计的,它包括前向通道和反馈通道。前向通道是指根据指令驱动电机,控制天线指向变化的通道;反馈通道是指利用跟踪接收机获取天线指向与卫星位置之间的误差,并反馈给控制系统的通道。
从控制系统的观点看,导引头伺服系统是采用电流反馈回路、速度反馈回路和位置反馈回路组成的闭环控制系统。系统的控制目标是使跟踪角误差信号趋向于零,使导引头天线指向能够自动、连续和精确地反映出目标位置的变化,从而实现自动跟踪。
2 数学模型建立
2.1 角稳定回路
角稳定回路直接影响着隔离载体扰动和位置伺服精度,是保证导引头伺服系统性能的重要环节。角稳定回路原理如图2所示,其主要由电机、减速器、速率陀螺和校正装置等构成,是角跟踪回路的内回路。
导引头通过回波天线接收舰船目标信号,并将接收到的舰船目标信号进行滤波等信息处理后,得到相应的跟踪角误差信号,然后利用伺服系统去控制回波天线向着减小角误差信号的方向旋转,进而实现舰船目标的角度稳定控制[7-8]。
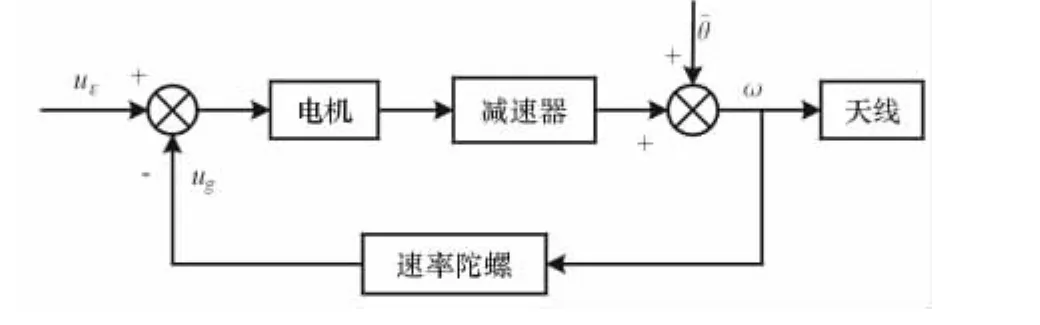
图2 角稳定回路原理图
图2中,uε为导引头伺服系统的角误差电压信号,ug为速率陀螺的输出电压,ω为回波天线转速,为扰动角速度。采用速率陀螺反馈构成角稳定回路,它是一种二自由度陀螺,能够输出一个正比于导引头传动机构敏感轴的角速度电压信号。
导引头伺服系统采用直流伺服电动机,建立电枢回路模型如图3所示。
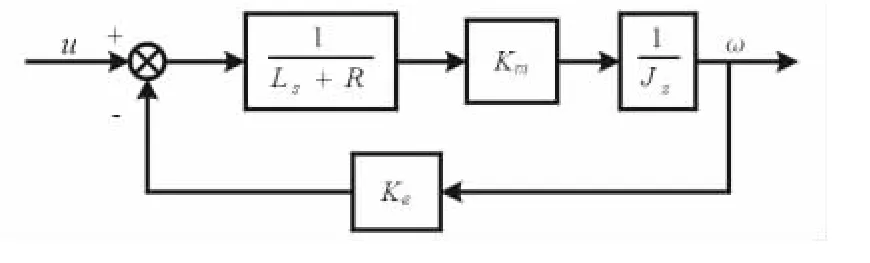
图3 电枢回路模型
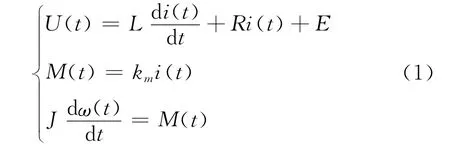
式中:U (t)为伺服系统的电机电枢电压;R和L分别为电枢电路的电阻和电感,分别设置为L=0.03H和R=5Ω;i(t)为电枢电压所产生的电枢电流;E=k×ω(t)为电枢反电势,其中k表示反电势系数,设置为k=0.45V·s/rad,ω(t)为电机转速;km为电机转矩系数,设置为km=0.35N·m/A;M(t)为电枢电流产生的电磁转矩;J为电机和负载折合到电机轴上的转动惯量,设置为J=0.3kg·m2。
2.2 角跟踪回路
角跟踪回路原理如图4所示,在反舰导弹导引头发现舰船目标后,伺服系统进入角跟踪回路工作状态,导引头通过回波天线接收舰船目标信号,同时根据角误差信号产生相应的控制电压控制电机转动,使回波天线向着减小跟踪目标角误差的方向旋转。在角跟踪回路工作状态下,天线伺服系统是由电流反馈回路、速度反馈回路和位置反馈回路构成,其中电流反馈回路和速度反馈回路起到提高系统阻尼系数和增加系统频带宽度的作用,位置反馈回路起到改善系统目标跟踪性能的作用。
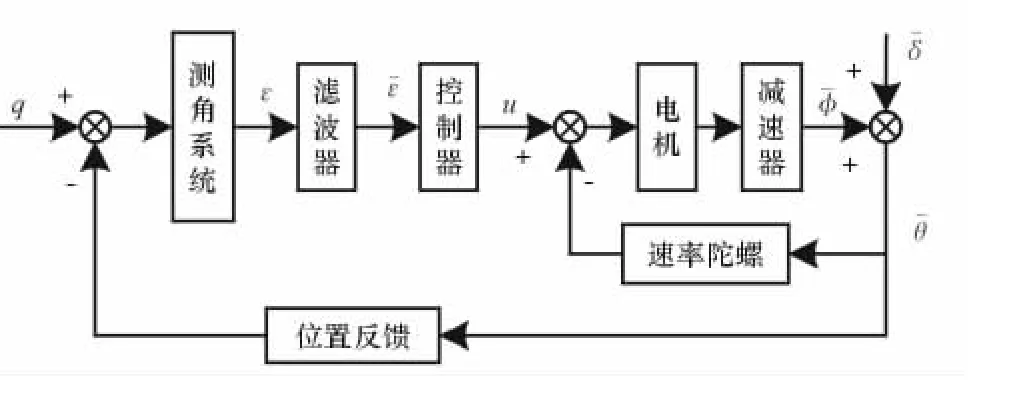
图4 角跟踪回路原理图
角跟踪回路实际上由测角系统、滤波器和角稳定回路组成。由于反舰导弹导引头抗干扰能力较差,以及接收机的输出信号是一个迭加有热噪声、干扰及杂波的目标回波信号,导致失调角噪声比较大,解决方法是在角跟踪回路中引入Kalman滤波器,通过滤波可以为系统提供精确的目标数据。
角跟踪回路数学模型如图5所示。
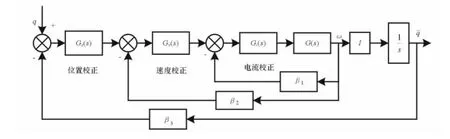
图5 角跟踪回路模型

2.3 角预定回路
在角预定回路工作状态下,天线伺服系统只接通放大校正环节、功率放大器以及电枢回路,其原理如图6所示。
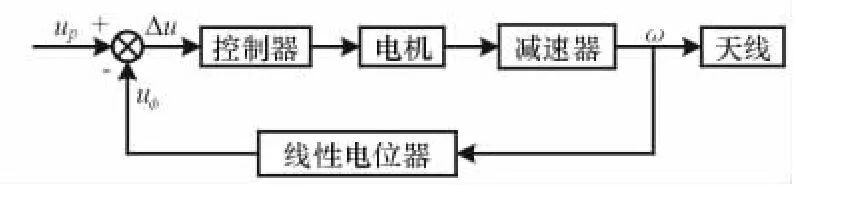
图6 角预定回路原理图
通常情况下,在反舰导弹发射前,需要根据系统提供的角预定信号产生相应的控制电压,通过功率放大器放大驱动电机快速、准确地将回波天线的指向预先对准舰船目标或者前置一定的角度,使得在反舰导弹发射后,舰船目标的回波信号准确地落在回波天线波束范围内,保证反舰导弹导引头能够顺利地截获目标。
图6中,up表示角预定信号,uφ表示线性电位器输出的并且与回波天线实际转角成正比的电压信号,Δu表示预定角误差信号。角预定回路的控制器利用预定角误差Δu产生控制指令,控制电机使回波天线向预定角位置旋转,并且快速、准确地指向目标角度预定位置,即当uφ=up时,Δu=0,回波天线指向角装定完毕并停止转动。角预定回路的数学模型如图7所示。
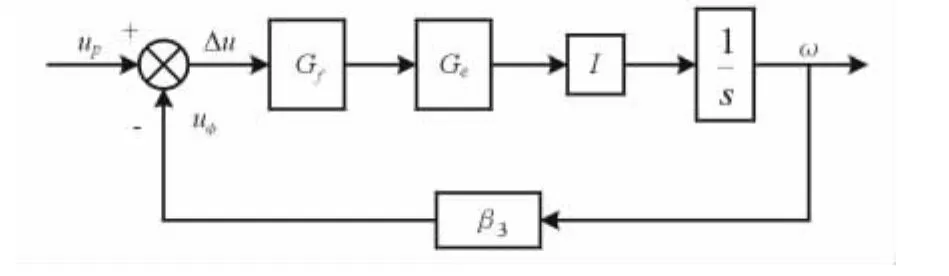
图7 角预定回路数学模型
3 仿真分析
3.1 Simulink控制模型
根据第2节建立的伺服系统角稳定回路、角跟踪回路和角预定回路数学模型,以某型反舰导弹导引头为主要研究对象,并利用具有动态建模、仿真及综合分析功能的Matlab/Simulink仿真环境,采用模块化的建模思想,建立反舰导弹导引头伺服系统的Simulink控制模型,如图8所示。
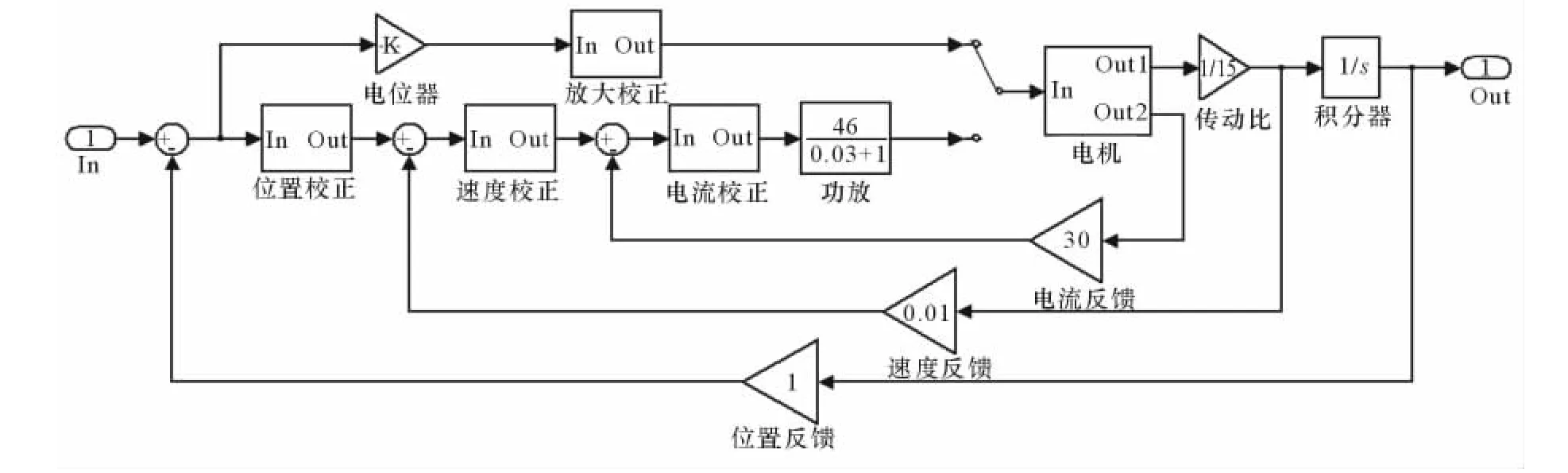
图8 导引头伺服系统Simulink模型图
3.2 仿真结果
将建立的反舰导弹导引头伺服系统模型在Simulink中进行仿真,采样周期为1ms,对于角跟踪回路,输入一个变化率为20°/s的三角波,导引头伺服系统误差曲线如图9所示。可以看出,在一定的噪声干扰和角闪烁扰动的情况下,角跟踪回路可以快速稳定地跟随输入变化,具有较好的响应速度和跟踪精度。
图10为导引头伺服系统角速度信号输出,由仿真结果可知,校正后的系统在输入为2°/s的角速度信号时,输入和输出曲线最终接近平行,平行线间的距离即为稳态跟踪误差,能很好地复现系统的输入,这说明系统具有很好的跟踪性能。
对于角预定回路,当系统的输入为单位阶跃响应,系统输出如图11所示,可以看到该导引头伺服系统在0.5s的时间内快速响应达到了角预定区域,基本满足角预定回路的性能要求。
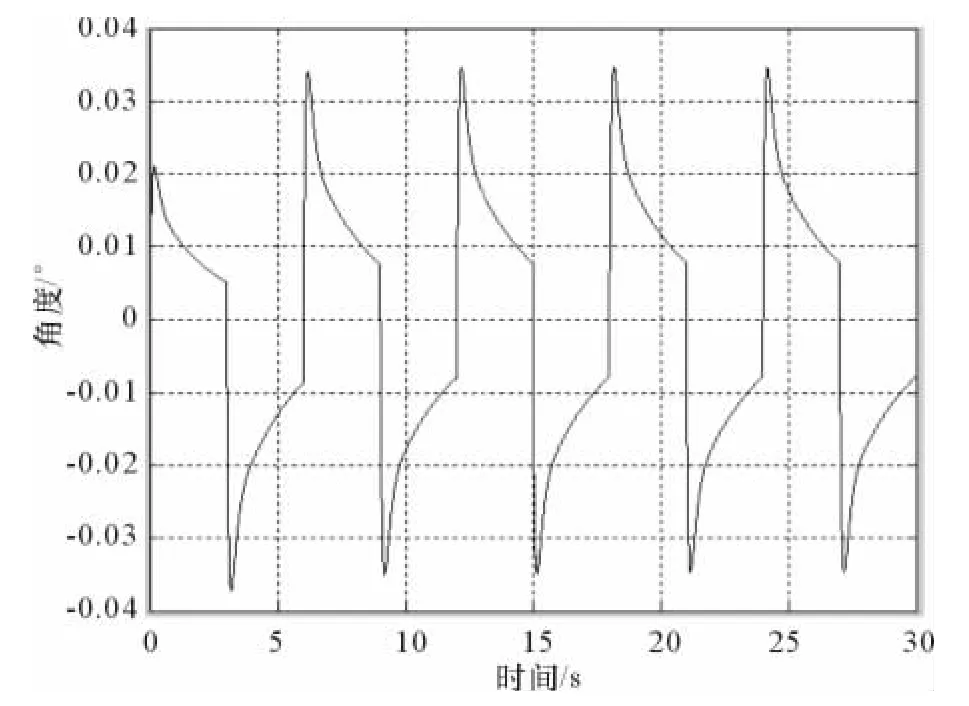
图9 导引头伺服系统误差曲线
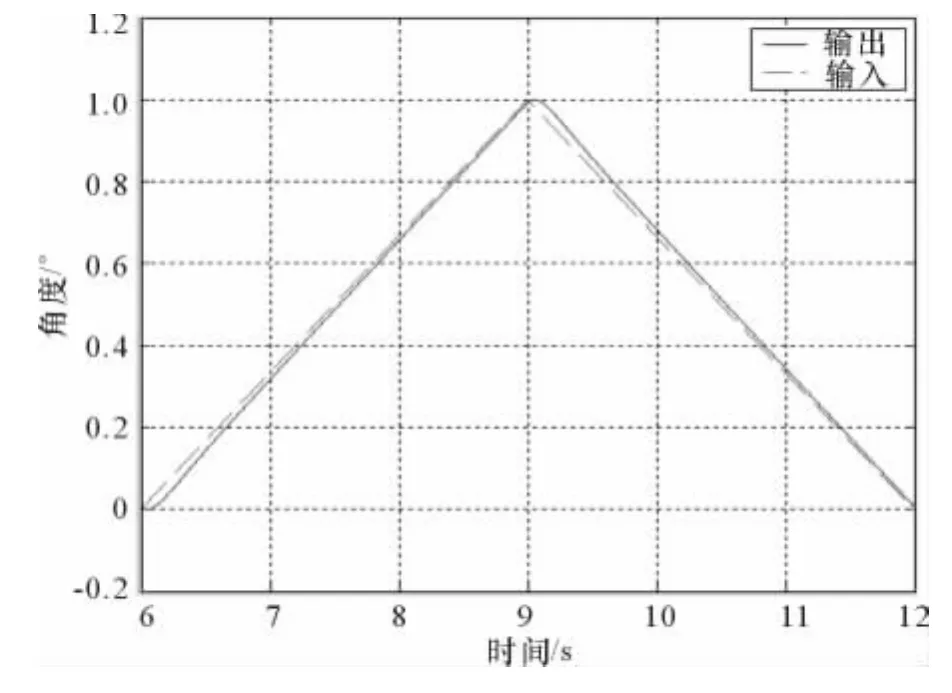
图10 导引头伺服系统角速度信号输出图
4 结束语
在干扰条件下,通过对导引头伺服系统进行数学建模,构建了导引头伺服系统的Simulink控制模型;为提高导引头抗干扰能力,在角跟踪回路中引入Kalman滤波器,通过滤波可以为系统提供精确的目标数据;以某型导引头为例进行动态仿真分析,得到了系统的动态响应结果,验证了所给出方法的有效性,可以有效缩短系统开发时间,对于其它系统的研究具有一定的借鉴意义。
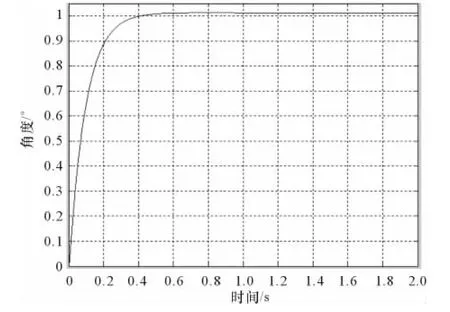
图11 预定回路输出图
[1]栗苹,耿小明,闫晓鹏.同步闪烁干扰对雷达导引头天线伺服 系 统 的 影 响 [J].兵 工 学 报,2010,31(5):558-561.
[2]王刚,李言俊,段世忠.基于Simulink导引头天线伺服系统的建模与仿真研究[J].弹道与制导学报,2006,26(2):346-348.
[3]Raool S B,Bell M R.Efficient pulse-doppler processing and ambiguity functions of nonuniform coherent pulse trains[J].IEEE International Radar Conference 2010,Washington D C,USA:1150-1155.
[4]任丽莉,马国哲,曹旭东,等.雷达导引头天线伺服系统改进设计[J].电子测量技术,2010,33(3):1-4.
[5]高胜灵,胡松启.基于 Matlab/Simulink的导弹六自由度弹道仿真系统设计[J].科学技术与工程,2011,11(1):29-34.
[6]李保国.基于目标角闪烁特性的末制导雷达跟踪与识别技术[D].长沙:国防科学技术大学,2005.
[7]邹丽娟.基于Matlab/Simulink的测量雷达伺服系统的仿真方法[J].现代雷达,2004,26(8):64-67.
[8]Deming R W,Schindler J,PerloVaky L I.Multi-target/multi-sensor tracking using only range and Doppler measurements[J].IEEE Transactions on Aerospace and Electronic Systems,2009,45(1):593-611.
猜你喜欢
建材发展导向(2022年18期)2022-09-22
北京航空航天大学学报(2022年6期)2022-07-02
数字海洋与水下攻防(2020年5期)2021-01-04
兵器知识(2017年10期)2017-10-19
制导与引信(2016年3期)2016-03-20
北京航空航天大学学报(2016年4期)2016-02-27
火控雷达技术(2016年1期)2016-02-06
海军航空大学学报(2015年1期)2015-11-11
弹箭与制导学报(2015年1期)2015-03-11
弹箭与制导学报(2015年1期)2015-03-11
