基于虚拟实时温控系统的自控概念教学
2013-10-12 03:28:28陈凤祥孙泽昌
电气电子教学学报 2013年5期
陈凤祥,孙泽昌,章 桐
(同济大学汽车学院,新能源汽车工程中心,上海201804)
在“自动控制原理”课程中的温度控制系统,具有结构原理简单的特点,还常见于实际生活之中,如空调、恒温箱和电热炉等。在许多“自动控制原理”课程教材的绪论部分,也采用了温度控制系统进行自动控制原理的相关概念阐述[1,2]。我们和学生交流中发现,如果在教学中能够有一个真实(或仿真)系统实时的演示,在演示的时候将相关概念融合进去,则他们会更容易理解。
为此,我院自动控制课题组拟开发自动控制虚拟实验室软件,对自动控制的每一章节都有相关虚拟实验(有些还配有相关硬件)进行课堂演示。学生可以在课后运行这些虚拟实验以进一步消化和理解各知识点。本文针对温控系统的特点和相关自动控制入门概念教学的需要,在Simulink下设计了一款可以实时仿真的温控系统,可让学生清晰地看到人工控制和自动控制下温度实时变化情况,开环控制和闭环控制下相关的优缺点,有兴趣学生还可以进行控制策略的开发。
1 温控系统虚拟实时仿真平台介绍
1.1 实时模块
Simulink可对模型进行仿真计算,也可基于RTW针对实际对象进行实时控制(也称半实物仿真),但并不能直接对模型进行实时仿真。为了让模型能够在Simulink中不借助于XPC或外部硬件系统便能进行实时仿真,我们在这里引入实时模块RT Blockset[3]。RT Blockset并不是Simulink标配模块,而是罗马大学的一名学生为了将Simulink模拟成实时环境编写而成的。该模块实现Simulink实时仿真的基本原理如图1所示。
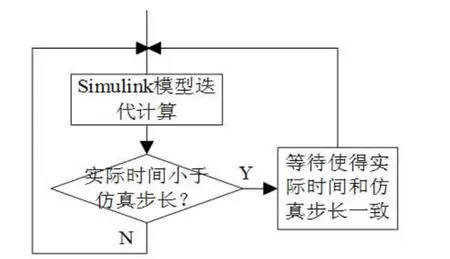
图1 实时仿真系统运行的基本原理图
它根据仿真步长时间和实际计算步长时间之差值来控制程序运行速度,当实际计算时间小于仿真步长时间时,则将处理器交给Windows的其它任务,直到实际时间和仿真步长时间相等则唤醒Simulink仿真,从而计算下一时刻的模型信息。这个实时模块在配置部分将Simulink任务划分成5个等级:空闲(IDLE),最低(LOWEST),标准(NORMAL),高(HIGH)和实时(REAL-TIME)。实际上它并没有借助于真实的实时操作系统,而是继续将任务运行在Windows这个非实时操作系统上,因此为了提高实时性,可根据需要将该任务配置成高于标准的优先级(如高,实时)。原则上优先级越高,实时性越强。在实际使用时,只需要直接将RT Blockset拖入到用户的Simulink模型框图中便可进行实时仿真。
1.2 温度控制系统模型
本温度控制系统,采用电压可调的直流电源来控制流进电热丝的电流大小,从而控制注入恒温箱内的热量,以达到温度控制之目的。箱内温度通过测温模块转换成电压信号,而后和给定装置的给定电压值进行差值运算并输入到控制器中,最终控制器通过输入的电压差值经过适当运算后用以调节可调直流电源的电压(如图2所示)。箱体模型中采用了二个惯性环节的串联分别模拟电热丝和箱体与环境的温度交换;测温模块采用了一个正比例函数将温度变换成电压信号;对于虚框部分,既可实现人工控制,也可通过计算机或模拟部件实现自动控制。
2 人工控制教学

图2 控制系统结构原理图
在虚拟实时仿真平台上可以实现最原始的人工控制,其控制框图如图3所示。由图可见,一旦温度高了让电源断开(让切换开关连接到电压0),温度低了让电源接上(让切换开关连接到电压1)。其控制效果如图4所示。显然这是一件十分费力的差事,而且控制精度低,重复性差。
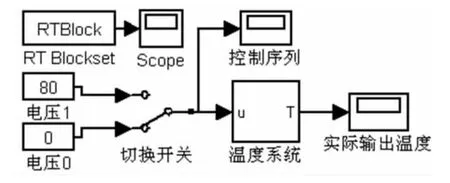
图3 人工控制框图

图4 人工实时控制效果图
3 自动控制教学
基于人工控制思想,可以采用Matlab的M语言来实现人工控制中的逻辑判断代替人工控制。显然控制效果还是代价都比人工控制好了许多,这便是自动控制。其中,开环和闭环是自动控制中二个基本也是十分重要的概念。
3.1 开环控制和闭环控制
开环控制是指控制装置与被控对象之间只有顺向作用而没有反向联系的控制过程,按这种方式组成的系统称为开环控制系统。对于开环系统,通过多次仿真实验建立起一张输入到输出的静态表格用于控制器设计。开环控制系统如图5所示。

图5 开环控制系统原理图
闭环控制是将输出量直接或间接反馈到输入端形成闭环、参与控制的控制方式,闭环控制系统如图6所示。

图6 闭环控制系统原理图
对于闭环系统,除了讲解闭环的概念外,还可和开环控制系统的特性进行仿真对比,从而让学生切实理解闭环和开环系统的各自优缺点。如当改变被控对象的静态特性后,开环系统出现了较大的稳态误差,然后闭环系统则依然让稳态误差保持为零或很小。改变被控对象的静态或动态特性也可能使得闭环控制稳定性变差,甚至不稳定。对于开环系统依然可以稳定,只是可能稳态误差变大。
在闭环系统中控制器实际上就是实现了一个从偏差到实际控制对象输入的映射f:e→u。从数学的角度,控制理论的学习目的就是寻找一个合适的映射,使得系统满足设计需求。但如何构造这样的映射往往并不是光靠数学可以完成的,更多需要对控制对象机理的理解,在此基础上再结合控制理论知识才能完成。
3.2 控制策略
闭环控制中的控制器实现了由电压差到电压调节的一个变换,反馈通道传感器部分实现了从温度到电压转换,这里采用了简单的线性变换。这样的软件实验平台可以让学生尝试采用如下三种不同的控制策略,来提升控制性能。
控制策略(1)采用如下的控制逻辑判断关系:

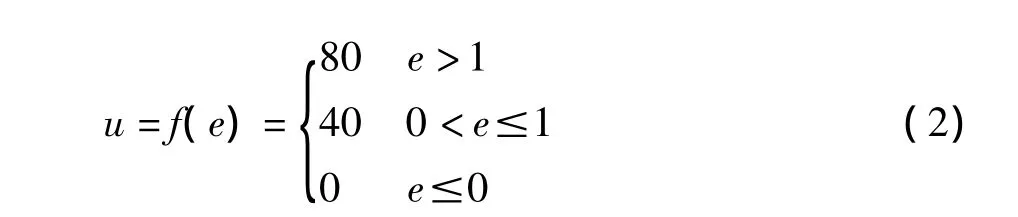
控制策略(2)考虑到温度误差大时,适合采用大电压从而产生大热流。但热惯性容易导致校正过头,因此误差小时采用低电压(产生小热流)校正,从而减轻校正过头的程度。基于这样的原则,则可以修改控制策略而采用如下的控制逻辑判断关系:
控制策略(3)是采用一个较为理想的修正后的PID控制器。
这样的软件实验平台还可以让学生尝试更多的原始控制策略来提升温度控制性能,例如在该平台上以控制策略(3)为模板,让学生将自己开发的控制策略与其进行对比。系统在开环和闭环三种策略下温度控制的仿真效果曲线如图7所示。

图7 开环和闭环三种策略下温度控制结果比较
由上图可知,在这些控制策略中,采用修正后的PID控制策略(3)具有最好的控制效果。学生就有更多兴趣去了解其中缘由,从而寻求更优秀的控制策略和设计方法。此外,还可以考虑提前关闭电源,使得其利用热惯性让温度过渡到期望位置附近。这些开放性的思维可以让学生去探索,这不仅可以增加他们对自动控制学习的积极性,还可以切实增强他们解决实际问题的能力。
4 偏差与误差
偏差是由传感器变送反馈(这里就是温度传感器反馈电压)与给定值(设定电压)之间的差值。它并不是期望输出(譬如在本文中就是期望温度值)与实际输出(实际温度值)的差值,后者就是误差的定义。显然误差和偏差是有区别的,但对于实际控制系统而言,控制器仅仅只需要检测偏差就足够了。
[1] 孔祥东,王益群,控制工程基础(第3版),北京:机械工业出版社,2008
[2] 胡寿松,自动控制原理(第5版),北京:科学出版社,2007
[3] http://leonardodaga.insyde.it/Simulink/RTBlockset.htm
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06 09:27:18
装备制造技术(2021年4期)2021-08-05 07:39:12
测控技术(2018年1期)2018-11-25 09:43:30
电子制作(2018年11期)2018-08-04 03:25:58
电子测试(2018年6期)2018-05-09 07:31:47
电子测试(2018年1期)2018-04-18 11:52:24
铁道通信信号(2016年12期)2016-06-01 12:11:58
海峡科技与产业(2016年3期)2016-05-17 04:32:11
合成化学(2015年4期)2016-01-17 09:01:04
海军航空大学学报(2015年1期)2015-11-11 17:22:41