
热烈庆祝“嫦娥三号”探测器发射成功
2013-10-11 05:53:32
航天返回与遥感 2013年6期
2013年12月2日1时30分,中国在西昌卫星发射中心用“长征三号乙”运载火箭,成功将“嫦娥三号”探测器发射升空。6日,北京航天飞行控制中心对“嫦娥三号”探测器成功实施近月制动,探测器顺利进入环月轨道。14日,“嫦娥三号”探测器在月球表面预选着陆区域成功着陆。15日,“嫦娥三号”着陆器与巡视器分离,巡视器顺利驶抵月球表面。自15日起至22日凌晨,“嫦娥三号”着陆器与巡视器共进行了5次互拍,传回了大量图像数据,相机成像正常。
“嫦娥三号”探测器,是着陆器和巡视器(俗称“月球车”)的组合体,将首次实现月球软着陆和月面巡视勘察任务。
由北京空间机电研究所负责研制的激光点阵器(见图 1)、伽马关机敏感器(见图 2)、监视相机与降落相机,是“嫦娥三号”着陆器和巡视器的重要组成部分。

图1 激光点阵器
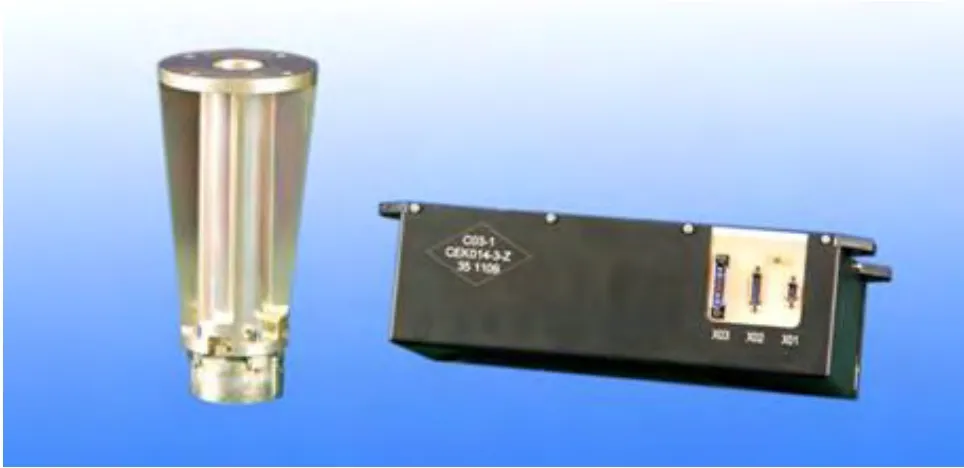
图2 伽马关机敏感器(左/发射器、右/接收处理器)
激光点阵器隶属于“嫦娥三号”巡视器GNC分系统避障探测,安装于巡视器围栏的正前方。它的质量不足1kg、体积不过砖头大、功耗类似手电筒,是我国拥有独立自主知识产权的全国产化产品,也是我国首台在地外星球表面的激光产品。工作时,激光点阵器向前方发射按一定规律分布的近红外激光束,在月球车行进前方形成特定图样的高零度高均匀的特征点,供月球车行走判断。它能够发射出一组指向精确的激光束,帮助月球车判断前面的月面是平地还是深坑。打开这组探路灯,月球车就可以进入激光探测避障移动模式,在月球上自由行走。
伽马关机敏感器是“嫦娥三号”着陆器GNC分系统的关键敏感器,首次应用于月球着陆近地高度测量,它的工作原理是靠产品接收光子的个数来测高,与“神舟”飞船上近地高度表的工作原理相差无几,但伽马关机敏感器的工作环境是月面,真空、发动机喷射的羽流、羽流激起的月尘等都是其面临的新考验。为了对伽马关机敏感器的产品性能进行充分验证,北京空间机电研究所还专门为“嫦娥三号”量身打造了一套月球着陆环境模拟装置。
另外,“嫦娥三号”着陆器上还装有由北京空间机电研究所负责研制的三台监视相机和一台降落相机。监视相机成像为彩色图像,用来实现“嫦娥三号”两器的解锁、脐带电缆脱离、巡视器驶离连接支架、行驶至转移机构、释放分离等关键过程的监测,提高探测器系统月表活动的展示度。降落相机成像为灰度图像,用于实现在着陆器降落过程中,在不同高度获取着陆区域的光学图像,用于分析着陆区月表的地形地貌和区域地质情况,从而辅助其它载荷进行科学探测,帮助“嫦娥三号”找到最稳妥的立足之处。
“嫦娥三号”探测器,不仅要在月球表面上实施软着陆,并且还要在月球上释放我国首辆“玉兔”月球车,获取月球物质成分并进行分析,发回数据和图像,再携带月球样本返回地球。此次探月成功将开启我国航天的新篇章,中国将是继美俄之后,人类第三个在月球实施探测器成功软着陆的国家,这标志着中国自动化机器人技术、远程遥感通讯控制技术进入世界先进行列。
猜你喜欢
工业工程设计(2021年3期)2021-06-30 12:15:04
航天器工程(2019年4期)2019-11-11 03:41:00
伙伴(2019年12期)2019-01-17 04:38:56
北京航空航天大学学报(2017年4期)2017-11-23 05:48:48
太空探索(2016年9期)2016-07-12 10:00:05
太空探索(2015年1期)2015-07-18 11:02:13
中学科技(2015年7期)2015-07-03 05:44:32
太空探索(2014年12期)2014-07-12 15:17:12
太空探索(2014年11期)2014-07-12 15:17:00
航天器工程(2014年4期)2014-03-11 16:35:39
