“阿波罗”登月舱的软着陆支架
2013-10-11 05:52:48黄伟
航天返回与遥感 2013年4期
黄伟
(北京空间机电研究所,北京100076)
1 引言
1969年7月,美国“阿波罗11号”飞船成功实现登月,人类首次踏上了月球。随后,美国继续开展了多次载人登月活动,获得了大量的月球样品和科学数据,人类对月球的认识由此前进了一大步,月球探测活动取得了极大的成就。
对于每一次登月任务,登月舱的软着陆支架无疑是最为关键的装置之一。软着陆支架能确保登月舱安全平稳地降落在月球表面,宇航员得以顺利出舱并进行月面探测活动。同时,软着陆支架还起到月面上升器的发射架作用,保证航天员携带月球样品可靠地由月面进入环月轨道,最终安全返回地球家园[1-2]。
2 “阿波罗”登月舱软着陆支架的指标要求
2.1 着陆支架的结构指标
着陆时登月舱质量为7 257kg;软着陆支架结构设计安全系数为 1.35;软着陆支架相关接头设计安全系数为1.5。
软着陆支架的质量,见表1[3]。
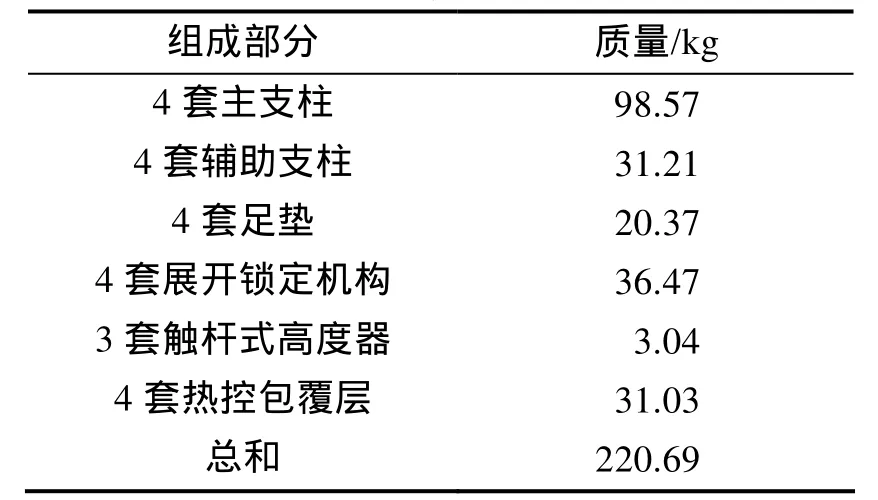
表1 软着陆支架质量分布Tab.1 The mass distribution of thelanding gear subsystem
2.2 机构的功能要求
软着陆支架能够收拢以适应发射时安装要求;在发射、地月转移、环月轨道阶段软着陆支架呈收拢状态,要求能够可靠锁定;软着陆支架要求能够通过宇航员触发指令展开,展开到位后,舱内仪表板上有显示。
2.3 着陆状态适应性要求
通过软着陆支架吸收登月舱着陆时的能量,减小冲击过载,并确保登月舱不倾覆;着陆冲击过载≤5gn;平均月面坡度≤6°;能适应的有效坡度≤12°(包含月坑、突起和足垫下陷的影响);着陆速度包络,当VV(垂直速度)≤2.1m/s时,VH(水平速度)=1.2m/s,当2.1m/s≤VV≤3.1m/s时,VH=4.1m/s~1.33VVm/s;月壤承载强度,静态压强6.9kPa时,陷入深度不大于101.6mm,动态压强82.7kPa时,深度不大于609.6mm;月面摩擦系数为0.4~1.0(注:事后飞行数据表明在0.4左右比较准确)[4-6]。
3 “阿波罗”登月舱软着陆支架构型设计
月球着陆器软着陆支架一般由3至5组着陆腿组成,每组着陆腿一般由3根支柱组成,1个主承力支柱,2个侧向辅助支柱。支柱的组合方式主要有“倒三角”和“悬臂”两种形式[3]。
“倒三角”组合形式是主支柱和2个辅助支柱在主支柱内筒下端的足垫附近相连接,构成三角锥杆系。“悬臂”组合形式是2个辅助支柱在主支柱外筒下端与主支柱连接,主支柱内筒单独与足垫相连,构成“悬臂–斜撑”结构。两种构型的示意对比见图1。

图1 两种不同的支柱构型方式Fig.1 The two types of landing gear
早期,“阿波罗”登月舱外形为圆柱体形状,并设计了5条支腿的软着陆支架,构型为“倒三角”式,不具备收拢、展开功能,为固定式方案,见图 2。对于圆柱体形状的登月舱,在不考虑收拢展开需求的情况下,经过分析,使用5条支腿是综合质量、着陆稳定性等因素较优的方案。

图2 “阿波罗”早期5支腿“倒三角”式软着陆支架Fig.2 The previous five-legged inverted-tripod-type landing gear of Apollo lunar module
由于,“阿波罗”登月舱主结构由圆柱形改为了十字布局方案,不利于5支腿布置,使用4条支腿方案更为优化。为了达到相近的着陆稳定性,4支腿方案相比5支腿要求具备更大的展开直径。基于运载火箭包络尺寸的限制,要求4支腿构型的软着陆支架具备收拢、展开能力。经过多方案比较后,“阿波罗”登月舱最终选用了4支腿、“悬臂”式构型,见图3。

图3 “阿波罗”使用“悬臂”式构型Fig.3 The cantilever type landing gear of Apollo lunar module
相对于“倒三角”构型,“悬臂”式构型的优势,主要体现为:由于辅助支柱与“倒三角”式相比,长度大为缩短,所以“悬臂”式着陆腿的质量更轻;“悬臂”式构型中只有主支柱与足垫连接,故支柱与足垫的连接结构更为简单,并且避免了着陆缓冲时足垫运动与辅助支柱干涉的可能。
“阿波罗”登月舱在发射时,软着陆支架呈收拢状态,直到登月舱从环月轨道开始进入动力下降段时展开,其最大展开尺寸约为9.45m,见图4。

图4 “阿波罗”登月舱软着陆支架展开状态Fig.4 The Apollo lunar module w ith the landing gear deployed
4 软着陆支架各部件的设计方案
4.1 主支柱
主支柱包含内筒、外筒等零件,着陆时内筒可在外筒内运动,外筒上端通过万向接头与登月舱主体结构连接,内筒下端通过球铰接头与足垫连接,主支柱内部安装两级缓冲铝蜂窝,缓冲前主支柱长度约为3.1m。主支柱见图5所示。主支柱材料使用超硬铝合金制作(接近中国牌号7A09的材料),内筒直径约140mm,上下两端进行了加厚设计,下端球铰连接的部位壁厚约3.8mm,上端与外筒交接的部位内筒壁厚约6.5mm。外筒内壁及内筒外壁均涂覆二硫化钼固体润滑涂层。主支柱的缓冲行程达到813mm,可以吸收的最大能量约28.7kJ[3]。

图5 主支柱设计示意图Fig.5 Landing-gear primary strut
4.2 辅助支柱
辅助支柱也包含内筒、外筒等零件。外筒通过1个球铰接头与主支柱连接,内筒通过1个万向接头与展开架连接。辅助支柱内部安装有缓冲铝蜂窝,其结构设计成具备拉、压双向的缓冲吸能功能,如图6所示。缓冲前辅助支柱长度约为 1.22m,使用硬铝合金制作(中国牌号 2A12材料),其外筒直径约为114mm,外筒壁厚0.69mm,内筒壁厚0.84mm。在外筒开口部位设置了1个长度约为83mm、厚度约为0.4mm、由聚四氟乙烯材料制成的套筒,以作为对内筒的支撑、并减小内外筒间相对运动的摩擦力。内筒开口部位也设置有类似的支撑套筒。辅助支柱拉伸方向的吸能可达到约7.0kJ,压缩方向的吸能可达到约 6.1kJ[3]。

图6 辅助支柱设计示意图Fig.6 Landing-gear secondary strut
4.3 足垫
足垫用于增大着陆腿与月面的接触面积,使登月舱着陆能接触到一定的月面,不受局部坑洞和岩石的影响。足垫由铝合金外壳以及内部的铝蜂窝组成,直径约 0.94m,厚度约 0.18m。着陆前,足垫由限制带固定在主支柱上,防止足垫转动,触地时限制带被崩断,从而解除了对足垫转动的约束,限制带的拉断力矩设计为约377N·m。足垫铝合金外壳的上部厚度为0.2mm~1.3mm,下部厚度为0.2mm~0.4mm,材料为中国牌号2A12[8]。
4.4 展开架
展开架由十字形横梁及4根侧支杆组成。在软着陆支架展开状态,展开架用于支撑辅助支柱。同时,展开锁定机构安装在展开架上,展开架在展开机构驱动下由折叠逐渐展开,最后由锁定机构固定住,从而实现整个着陆腿的展开和锁定功能。展开架由超硬铝合金制作,接近中国牌号7A04材料[8]。
4.5 收拢和释放机构
为了适应运载火箭的包络尺寸,软着陆支架发射时为收拢状态,为此设计了两种收拢释放机构,分别作用在着陆腿的主支柱和展开架上。第一种收拢释放机构通过火工装置切断带条形式实现。具体为,收拢状态下,4组着陆腿的主支柱通过1根钛合金带条束缚固定。展开时,由火工装置切断钛合金带条,4组着陆腿在各自的展开锁定机构作用下运动到展开状态并锁定保持。第二种收拢释放机构为解锁器的形式。具体为,在收拢状态下,每个展开架的侧下支杆通过1个解锁器与登月舱主体结构连接,每个解锁器施加约1 557N的束缚力。展开时,解锁器工作,解除展开架和主体结构的连接约束。解锁器以及固定主支柱的钛合金带条共同作用的约 4 895N的束缚力一起确保了整个软着陆支架能够适应发射、飞行过程中的振动、冲击条件。着陆腿的收拢、展开状态如图7所示[3]。
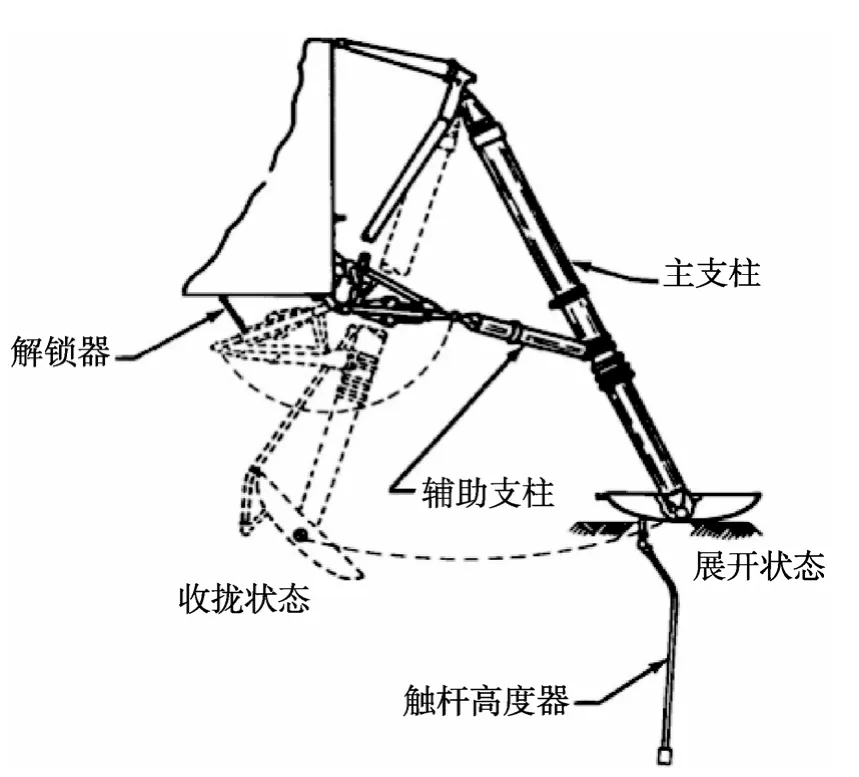
图7 着陆腿收拢、展开状态示意Fig.7 Stowed and deployed positions of the landing gear
4.6 展开、锁定机构
展开、锁定机构执行两步动作:通过操纵展开架上的杆件系动作,实现整个着陆腿由收拢到展开;当主支柱展开到位后,通过对展开架的限位和固定,实现对整个着陆腿的锁定。着陆腿的展开、锁定过程见图8所示[9]。

图8 展开、锁定机构及其展开过程Fig.8 Deployment and downlock mechanism, and the deployment process
展开机构由蜗卷簧和驱动连杆组成,蜗卷簧采用不锈钢带制成,表面有固体润滑涂层,驱动连杆系分别连接到登月舱主体结构和展开架侧下的方支杆,蜗卷簧一端连接驱动连杆,另一端与安装在主体结构上的卷轴连接。在着陆腿收拢状态,蜗卷簧呈拉伸状态储蓄能量。释放后,蜗卷簧收缩并带动驱动连杆动作,展开架转动并展开整个着陆腿。
锁定结构由弹簧作动的锁钩、支撑凸轮等零件组成。当着陆腿为收拢状态时,锁钩上的圆销位于凸轮上部,被凸轮限制了锁钩的运动,锁钩呈张开状态。着陆腿展开时,凸轮旋转,展开到位后锁钩上的圆销失去凸轮上表面的支撑,弹簧作动筒即推着锁钩转动,锁钩落下并钩住展开架侧上方支杆端部的滚轴,从而锁定整个机构。
展开架两边支杆均锁定后,触发登月舱内的指示信号,表明着陆腿展开锁定动作执行完成。此外,在锁定机构的锁钩、展开架上侧杆端部等部位涂有红色的条纹,如果着陆腿展开锁定工作正常,红色条纹形成连续的直线,以此作为宇航员判断软着陆支架是否正常展开的辅助手段[3]。
4.7 触杆高度器
除了安装宇航员进出登月舱架梯的1条着陆腿之外,其余3组着陆腿上均在足垫下方安装了1根长度约为1.7m的触杆高度器,用于感知着陆前登月舱离月面的高度,并指示宇航员及时关闭下降发动机。触杆高度器包括触杆、展开机构以及电路开关装置。当登月舱着陆时,触杆端部接触月面,电路开关装置触发,登月舱内有2组蓝色指示灯点亮。
触杆使用2A12铝合金制成,直径约32mm,由活动部件和固定部件两部分通过铰链连接,并通过和主支柱收拢、释放装置联合作动的弹簧锁钩装置实现锁定。在触杆活动部件和固定部件的结合部位绘制绿色线条,以作为判断触杆展开锁定到位的标志。电路开关装置内部安装有并联的 2组簧片动作开关,使得触杆受到7kPa压强即发出触月信号。软着陆支架3组着陆腿的触杆高度器各自独立,从而保证了触月信号具备较高的可靠性[3]。
4.8 铝蜂窝
“阿波罗”登月舱软着陆支架的缓冲元件使用铝蜂窝。铝蜂窝具有较低的密度,较高的比模量、比强度以及优良的耐热性和抗腐蚀性。铝蜂窝的缓冲性能具有各向异性、沿蜂窝芯子轴线方向的缓冲力非常稳定,即其缓冲曲线具备“平台”特性,承载能力基本维持在一定水平上作不大的波动[7]。典型的压缩前后的铝蜂窝如图9所示。
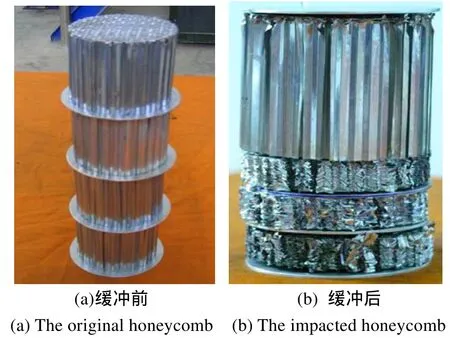
图9 铝蜂窝Fig.9 The honeycomb
“阿波罗”登月舱软着陆支架共使用了5种规格的铝蜂窝,其缓冲行程及缓冲力参数见表2。
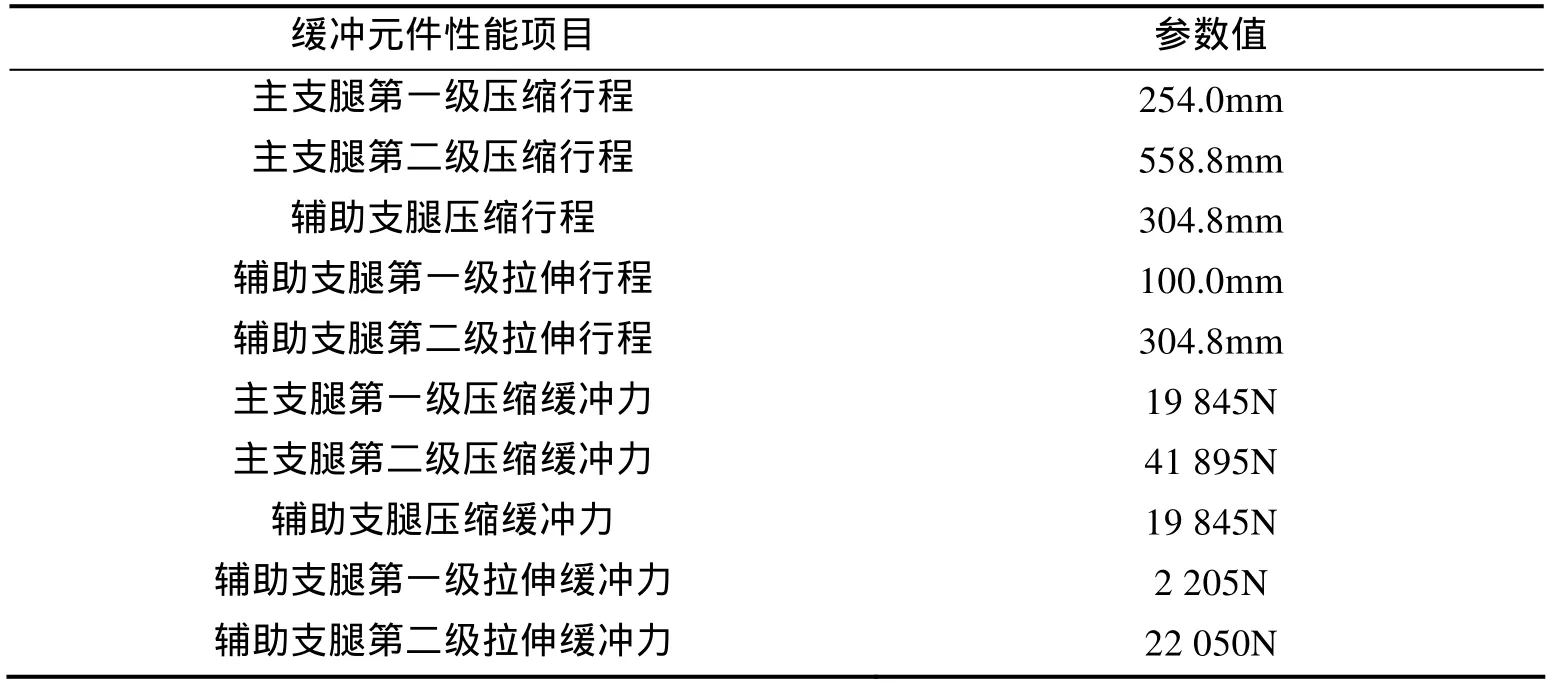
表2 “阿波罗”登月舱软着陆支架缓冲元件性能参数Tab.2 Theperformance parameters of Apollo landing gear attenuation component
5 飞行试验结果
“阿波罗9号”、“阿波罗10号”验证了软着陆支架在空间展开锁定的性能。在“阿波罗11号”飞行之前,对软着陆支架进行了大量的仿真分析和试验验证,尤其是针对最终缓冲性能开展了1/6尺寸模型的冲击试验以及多次全尺寸模型在模拟1/6重力的斜面上的着陆缓冲及稳定性试验,表明软着陆支架的性能能够满足各项指标要求[5]。
在“阿波罗11号”落月时,登月舱的最终着陆速度很低,其垂直着陆速度约为0.5m/s,水平着陆速度约为0.6m/s。据宇航员报道,登月舱着陆时几乎没有摇晃不稳的感觉。根据事后分析,软着陆支架的主支柱发生的缓冲行程很小,4组着陆腿均在25mm以内;辅助支柱基本发生的都是拉伸方向的缓冲,最大的行程为100mm左右;缓冲后登月舱底部的发动机裙边距月面高度约为343mm(如不发生缓冲,该距离为483mm)。后续的“阿波罗12号”“阿波罗14号”至“阿波罗17号”登月舱落月时软着陆支架均未遇上苛刻的工况,工作均很正常,状态良好[10]。
6 对我国载人登月软着陆支架设计的建议
综合上文所述,“阿波罗”登月舱软着陆支架的设计有以下特点:
1)“阿波罗”登月舱软着陆支架的设计考虑了月坡、月石、较大的着陆速度等恶劣工况,缓冲能力及着陆稳定性具备较大的设计裕度,可靠性高。
2)设计采用4组“悬臂”式着陆腿、可收拢展开的构型,是充分考虑质量、着陆稳定性、运载器包络要求、各种恶劣工况条件等因素的综合优化结果。
3)采用铝蜂窝作为缓冲元件,其吸能效率高、质量轻,对于一次性使用的登月舱软着陆支架是较为有效、可靠且简单的方法。
4)采用弹簧驱动方式的展开锁定机构,相对于电机驱动、液压驱动、火工作动等方式,系统设计较为简单,且能够相对独立。其关键问题是要解决机构的运动优化,不能出现干涉和死点,必须保证机构的重复运行精度。
结合以上“阿波罗”登月舱软着陆支架的设计特点以及其研制过程中的方案变更情况,对我国载人登月软着陆支架设计提出以下建议:
1)载人登月舱软着陆支架的设计与无人登月情况有很大不同,必须结合载人登月舱的总体构型进行设计,尤其是选择着陆腿数量、布局以及软着陆支架构型时,需结合登月舱的结构形式进行分析确定。
2)进行载人登月舱软着陆支架的设计需要充分考虑各种因素的影响,包括月坡、月石、月壤等不同的月面环境,以及航天员的生理过载安全承受能力、登月舱的着陆速度包络以及运载火箭尺寸包络等。
3)展开锁定机构、缓冲元件、主辅支柱等部件的设计是软着陆支架的关键部分,有必要借鉴“阿波罗”登月舱软着陆支架等成功经验,详细调研分析当前相关材料等基础技术的发展现状,进行充分的方案论证和比较,即对于这些关键部分的设计需要从材料等基础方面开展深入研究。
4)确定载人登月软着陆支架设计的最终状态应充分结合模拟月球环境下的载人登月月球软着陆支架验证试验以及软着陆支架缓冲过程的动力学及运动稳定性仿真分析。尤其对于载人登月舱,由于其质量量级大,在地面进行模拟月球环境试验实施难度非常大且周期很长,有必要开展1/6尺寸模型的冲击试验,以修正仿真模型,减少全尺寸试验的次数。
7 结束语
综上所述,“阿波罗”登月舱软着陆支架的设计考虑了月面环境、着陆速度、运载包络等多种因素,并是充分结合了登月舱总体结构形式确定的设计方案。通过仿真分析、试验验证的情况来看,“阿波罗”登月舱软着陆支架的设计是非常成功的,对于我国载人登月重大工程的方案论证值得仔细研究和借鉴。
References)
[1]杨湘杰, 刘焕焕, 王文林.月球探测器的软着陆技术[J].机电产品的开发与创新, 2008, 21(3): 27-33.YANG Xiangjie, LIU Huanhuan, WANG Wenlin. An Introduction to Soft-landing Techniques for Lunar Lander[J]. Development & Innovation of Machinery & Electrical Products, 2008,21(3): 27-33. (in Chinese)
[2]Thomas J K.Manned Lunar Lander Design the Project Apollo Lunar Module(LM)[J]. AIAA 92-1480.
[3]William F R. Apollo Experience Report – Lunar Module Landing Gear Subsystem[R]. NASA TN D-6850.
[4]Scott R F. Apollo Program Soil Mechanics Experiment[R]. NASA CR-144438.
[5]Hinners N W.Lunar Soil Mechanics[R].NASA-CR-116588: 1-4.
[6]Ennis W W, Heap F.Lunar Surface Models for Apollo Case 320[R].NASA N79-72056, Enclose:1-2.
[7]张莹, 聂宏. 月球探测器软着陆缓冲材料分析研究[D]. 南京: 南京航空航天大学, 2008.ZHANG Ying, NIE Hong. The Research of Bumper Material in Lunar Lander Soft Landing[D]. Nanjing: Nanjing University of Aeronautics & Astronautics, 2008. (in Chinese)
[8]Ulysse J B. Evaluation of a Full-scale Lunar Gravity Simulator by Comparison of Landing Impact Tests of a Full-scale and a 1/6-scale Model[R]. NASA TN D-4474.
[9]Ulysse J B.Model Investigation of Technique for Conducting Full-scale Landing-impact Tests at Simulated Lunar Gravity[R].NASA TN D-2586.
[10]沈祖炜. “阿波罗”登月舱最终下降及着陆综述[J]. 航天返回与遥感, 2008, 29(1): 11-14.SHEN Zuwei. The Survey of Apollo LM during the Descent to the Lunar Surface[J]. Spacecraft Recovery&Remote Sensing,2008, 29(1): 11-14. (in Chinese)
猜你喜欢
钻采工艺(2022年4期)2022-10-21 11:18:54
小学科学(学生版)(2020年7期)2020-07-28 08:00:46
饮食保健(2020年7期)2020-04-30 08:44:44
英语文摘(2019年9期)2019-11-26 00:56:28
太空探索(2018年7期)2018-07-05 10:34:16
新产经(2018年6期)2018-07-04 00:39:34
小哥白尼(趣味科学)(2018年3期)2018-06-21 06:22:30
航空知识(2017年11期)2018-04-16 05:29:56
四川水泥(2016年8期)2016-07-18 12:06:31
家庭科学·新健康(2014年10期)2014-10-24 13:46:01