
一种电动车无刷直流电机控制系统仿真研究
2013-10-10 11:32:16李中望
常州工学院学报 2013年2期
李中望
(芜湖职业技术学院电气工程系,安徽 芜湖 241006)
0 引言
随着科技和社会的快速发展,公众对于环境的要求越来越高。全国大部分地区几乎每天都被一片阴霾所笼罩,有专家指出,机动车尾气排放是引发雾霾的主要原因之一。在灰霾天日益频繁的当下,合理地控制机动车的使用,减少尾气排放已成为共识,通过减排不仅可以有效改善环境,同时也可以大大节省油气资源。在此大背景下,电动车研究的重要性日益凸显。本文在应用控制系统Matlab/Simulink仿真软件的基础上,对电动车电动机控制系统进行了仿真研究,测试了系统的动态和静态性能,为今后相关系统的研究和设计提供了一种新的途径。
无刷电动机控制系统采用双闭环控制方案,它主要包括电机本体单元、电流滞环控制单元、速度控制单元和逆变器单元等,系统结构图如图1所示。
1 各单元仿真模型的建立
1.1 电机本体单元的建立
目前,多数电动车采用无刷直流电动机作为动力源。无刷直流电机的转子采用永磁材料励磁,几乎可以做到零励磁损耗。该电机推出后,传统的机械换向方式被新型电子换向器的应用所取代,凭借其体积小、重量轻、结构简单、可靠性高、调速范围宽以及输出转矩大等诸多优点被广泛使用,尤其是在电动车上的使用更为广泛。一般的无刷直流电动机系统由电源部分、电子换向器和电机本体组成,三者有机联系,密不可分。
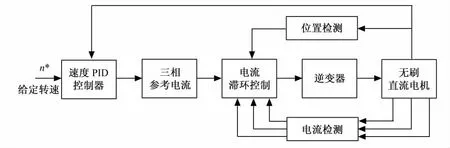
图1 控制系统框图
由于无刷直流电动机的电磁转矩大小与磁通量、电流的幅值大致成正比,因此,如果要控制无刷直流电动机的转矩,可以通过对逆变器输出电流方波的幅值进行控制。为了维持电磁转矩恒定,需要电动机的定子电流波形保证为方波,反电动势波形保证为梯形波,每经过半个周期,方波持续120度电角度,二者应该始终保持同步。在无刷电动机的建模过程中,反电动势的求取是关键。综合考虑,采取了简单易行且具有较高精度的线性分段的方法来建立,该方法是将一个运行周期分为六个阶段,每一相的每个阶段用直线描述,依据每个时刻的位置转速信号,将反电动势波形用直线方程来描述。电机本体单元的框图如图2所示,它主要包括由无刷直流电动机的绕组电压方程所建立的电压方程模块、无刷直流电动机反电动势模块以及用于计算给定条件下电机电磁转矩且在加载情况下计算电机转速和位置信号的电磁转矩计算模块。图2中,Ua、Ub、Uc分别为三相端电压,ea、eb、ec分别为三相反电动势,Ia、Ib、Ic为三相电流。电磁转矩计算模块的正确构建对于整个仿真工作十分重要。经过分析,无刷直流电动机运行时的电磁转矩公式可归纳为Te=(e1i1+e2i2+e3i3)/ω,其中,分子中的e表示电动机定子侧绕组的三相反电动势,i表示对应的三相绕组相电流,ω为电机机械角速度,无刷直流电动机的运动方程为:

其中,TL表示负载转矩,B为黏滞摩擦系数,J为电机转子转动量惯量。式(1)作为构建电磁转矩计算单元的基本依据。
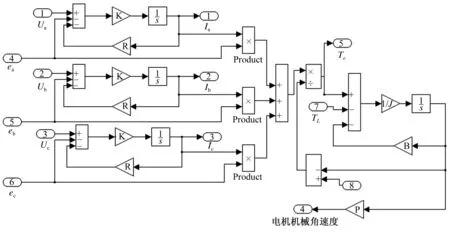
图2 本体单元框图
1.2 电流控制单元
在电机运行过程中,电流是需要重点考虑的要素。本系统在此单元中运用电流滞环控制原理,易于实现对电机电流大小的实时跟踪,响应迅速且稳定性好。在工作过程中,实际电流值不断地与参考电流进行比较,当二者比较有差值并且达到一定值时,相应逆变器的状态将会随之改变,输出电流也会改变。当电流滞环的环宽适宜时,即可实现对电流的精确控制,具体来说,当反馈电流值达到给定电流的滞环宽度上沿时,输出低电平,对应的开关器件将关断,绕组电流将随之下降;而当反馈电流值降低到给定电流下沿时,输出高电平,对应的开关器件将开通,绕组电流上升。电流控制单元框图如图3所示。

图3 电流控制单元框图
1.3 速度控制单元
在双闭环控制系统中,速度环主要起到稳定电机转速,增强系统抗干扰能力的作用。该控制系统采用PID控制方式,稳定性好、工作可靠、调整方便,可根据系统的具体误差,利用比例、积分和微分计算出控制量进行控制。速度控制单元可以做到实时监测电机运行状态,实现速度的负反馈和无静差控制,较为显著地提升了系统的动静态性能。速度控制单元框图如图4所示,速度比较环节框图如图5所示。速度控制单元输出是控制电流的参考值,Saturation模块能将输出的电流限定在要求的范围之内。
1.4 逆变器单元
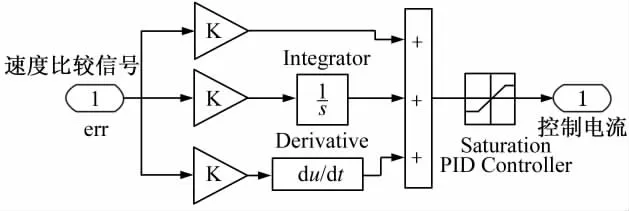
图4 速度控制单元框图
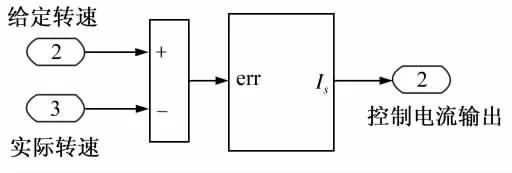
图5 速度比较环节框图
该单元是无刷电机的功率变换单元,在电流控制模块输出信号的控制下,对无刷直流电机的输入绕组电压进行合适的调节,可以控制电机的转动速度,逆变器单元框图如图6所示。本文采用Simulink中SimPowerSystem工具箱中的全桥模块和直流电源模块。全桥模块采用三桥臂,功率开关器件采用MOSFET管,其导通与断开由电流控制单元输出的信号控制,实现了对无刷直流电机的三相全桥控制。在Matlab7.0以上版本中,由于SimPowerSystem工具箱内的模块无法直接与Simulink工具箱里的模块相连接,因此,可考虑在电机本体模块与全桥模块之间加3个受控的电压源,以实现双方的连接。
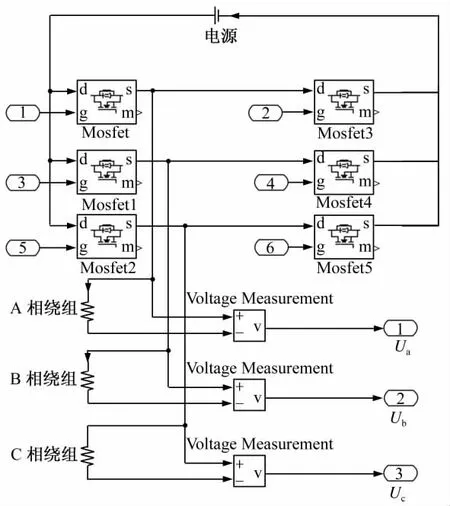
图6 逆变器单元
2 仿真分析
现设定无刷直流电动机的供电电压为220 V,给定转动速度为3 000 rad/min,为了更好地考量系统性能,在无刷电机启动0.2 s后,突然施加给定负载,在此情况下对电流、转矩和转速波形等进行仿真分析。
2.1 电流仿真波形
当电机刚刚启动时,A相电流迅速上升,经过一段时间的调整后,电流趋于平稳,且幅值较小。在0.2 s后加入负载,输出功率将增大,此时电机端电压恒定,电机电流将增大,电流波形如图7所示。
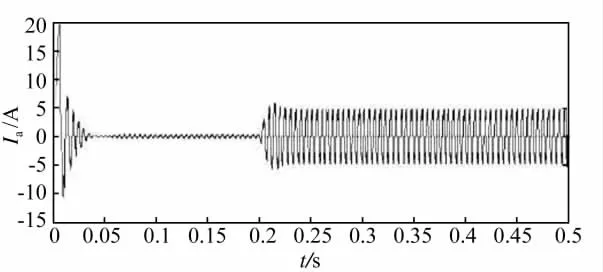
图7 电流仿真波形
2.2 转矩仿真波形
在电机系统起动阶段,系统可以保持转矩的恒定,因此没有受到较大的电流冲击和转矩冲击。而在起动伊始,电动机的反电动势尚未建立起来,转矩达到一个较高值,待反电动势建立起来后,转矩将渐渐趋于稳定。电机空载运行时,电机转矩值为零;加入负载后,电机定子电流增大,转矩也随之增大。由于电流换向以及电流滞环控制器的切换频率较高,因此转矩伴有较大的脉动现象,但很快会恢复平衡状态,如图8所示。
2.3 转速仿真波形
由于无刷电机的设定转速为3 000 rad/min,因此系统起动后,电机转速快速升高,并在0.05 s时进入稳定状态,经过0.2 s后加入负载,转速会有一个较为明显的下降过程,但在速度环的自动调节作用下,电机会很快恢复到稳定状态,同时可以观察到稳态误差。转速仿真图如图9所示。
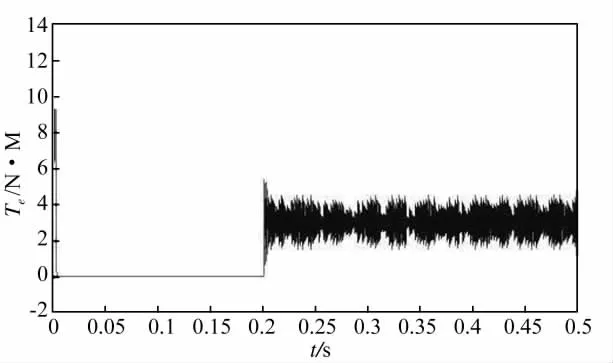
图8 转矩仿真波形
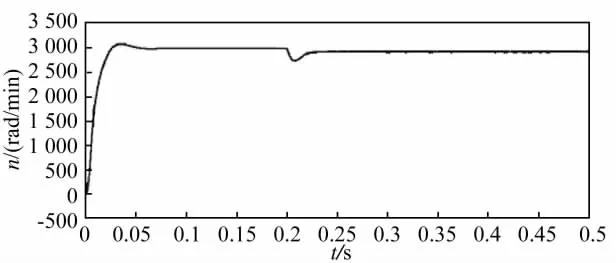
图9 转速仿真波形
3 结语
本文提出了一种利用Matlab/Simulink对电动车无刷电动机双闭环控制系统的仿真方案,通过仿真和分析显示,系统能够较平稳运行,动静态性能较好,该方案为类似控制系统提供了行之有效的研究思路和手段,具有较强的实用性。
[1]赵广元.MATLAB与控制系统仿真实践[M].北京:北京航空航天大学出版社,2009.
[2]房建成.永磁无刷直流电机控制技术与应用[M].北京:机械工业出版社,2011.
[3]夏长亮.无刷直流电机控制系统[M].北京:科学出版社,2011.
[4]谭建成.永磁无刷直流电机技术[M].北京:机械工业出版社,2011.
[5]薛定宇.基于 MATLAB/Simulink的系统仿真技术与应用[M].北京:清华大学出版社,2011.
猜你喜欢
大电机技术(2022年5期)2022-11-17 08:12:56
汽车维修技师(2019年7期)2020-01-16 04:33:04
四川冶金(2018年1期)2018-09-25 02:39:26
汽车维修技师(2018年11期)2018-05-11 02:38:32
电子制作(2017年1期)2017-05-17 03:54:12
中学生数理化·高一版(2017年1期)2017-04-25 13:22:35
通信电源技术(2016年1期)2016-04-16 04:57:26
淮南师范学院学报(2015年3期)2015-03-22 01:16:17
电机与控制应用(2015年3期)2015-03-01 03:49:59
电机与控制应用(2015年1期)2015-03-01 03:49:10
