
智能小车自动寻迹系统设计
2013-09-21 06:27陈荣湾
时代农机 2013年1期
袁 野,沈 斌,陈荣湾
(温州大学 机电工程学院,浙江 温州 325035)
随着智能交通系统研究的深入,小车的智能控制已成为未来发展趋势。智能车控制系统综合了传感器、自动控制、信号处理及微机控制等多学科知识的交叉融合,为智能搬运小车,无人驾驶汽车等技术领域的研究提供技支撑。
文章的研究背景针对小车在白色赛道沿着黑色引导线快速行驶。系统通过光电传感器采集路面信息,测量当前位置与目标位置之间的误差,通过PID环路控制,达到小车按照预定位置行驶的功能。
1 智能车系统硬件设计
智能车系统从传感器接收、单片机判断到执行机构执行的整个过程,如图1所示。系统主要包括:MCU主控模块、光电传感器模块、速度检测模块、舵机控制模块及电机驱动模块。MCU是系统的核心部分,负责接收光电传感器信号、小车速度等反馈信息,并对这些信息进行处理,执行PID控制算法对舵机和驱动电机进行控制;路径识别模块由A/D转换模块、相应电路以及光电传感器组成,其功能是获取前方路况的信息。
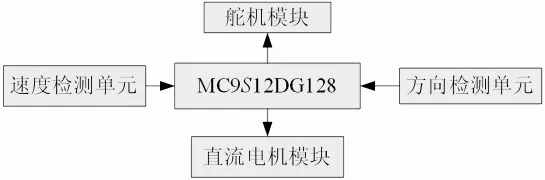
图1 系统主功能框图
(1)光电传感器模块。路径检测电路由红外发射管和红外接收管组成。红外发射管用场效应管IRF120驱动,由MCU控制场效应管的通断。场效应管导通时,电源加在红外发射管上,发射管发射红外线;场效应管截至时,发射管停止发射红外线。
通过红外接收管和电阻串联,组成分压电路来测量路面信息,电路如图2所示。光电管的布局采用“一”字等间距式排列,传感器前面加有弹性的塑性的保护条,保护光电管,以及调试过程中,防止智能车跑出轨道后与其他物体发生碰撞损坏,重要的是可以减少太阳光照对传感器的影响。
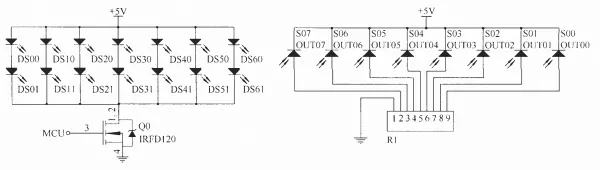
图2 红外传感器路径检测电路
红外传感器的原理是:路径轨迹由黑线指示,落在黑线区域内的光电二极管接收到的反射光线强度与白色区域的不同。在白色区域内,光电接收管导通,OUT为低电平。在黑色区域内,光电接收管截止,OUT为高电平。根据检测到的高低电平可以判断行小车的位置偏差量。为了增加判断时间,采用脉冲发射红外线的方法,以提高发射管的电流,让发射管照射更远的距离。
(2)车速检测模块。采用霍尔传感器作为速度传感器。在后轮输出齿轮轴上附近固定一个霍尔传感器633,如图3所示。633有3个引脚,其中2个电源和地,第3个是输出信号。只要通过一个上拉电阻接至5V电压,就可以形成开关脉冲信号,然后通过对应的算式可以将脉冲信号转化为速度信号。
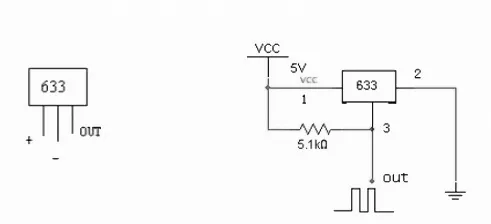
图3 霍尔传感器接口及原理图
(3)舵机控制模块。舵机是一种位置伺服驱动器,采用PWM控制方式。为提高舵机控制精度,本系统采用单片机的PWM0、PWM1两路8位PWM通道组成一路 16位的PWM。如果只使用单个PWM通道,精度只有1/255,舵机的转向角细分精度不能满足转向需要。将两个8位的PWM通道合并为16位,提供的精度就可以达到1/65536,大大提高了控制精度。通过测量目标位置与实际位置误差,并执行PID控制算法得到舵机转向控制量,实现小车位置的控制。
PID控制中,积分环节消除稳态误差,但会使系统稳定性下降,动态响应变慢。智能车控制器由于对动态特性要求较高,因此在实际设计系统的时候,可以适当地减小积分环节的作用,增大比例、微分环节的作用,控制流程如图4所示。
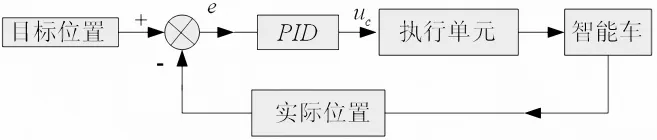
图4 舵机控制系统结构框图
舵机控制量公式:

其中:xk为第k次偏差,xk-1为第k-1次的偏差,yk为第k次输出,yk-1为第k-1次输出。
(4)电机驱动模块。电机驱动芯片采用MC33886,单片MC33886在工作时过载较严重,为了减小温升过高,采用2片并联驱动方式,如图5所示。
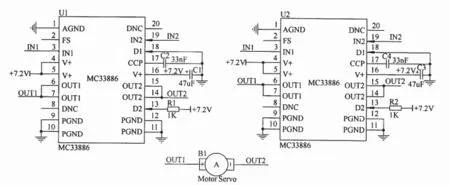
图5 电机驱动电路原理图
2 智能车的软件设计
智能车的控制是根据路径识别和车速检测所获得的当前路径和车速信息,控制舵机和驱动电机动作,从而调整智能车的行驶方向和速度,程序流程如图6所示。
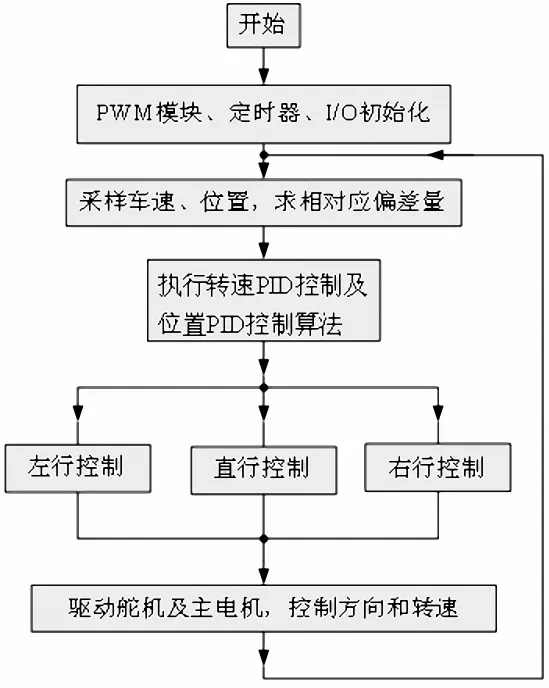
图6 软件设计流程图
3 结语
文章提出了一自主寻迹的智能车控制系统。以单片机做主控制器,直流电机作执行元件,完成了智能车的硬件及软件设计。实验结果表明该智能车能平稳地按照任意给定的路径引导线行驶,具有控制响应速度快、稳定性好,并具有较强的抗干扰能力。
[1]卓晴,黄开胜,邵贝贝.学做智能车-挑战“ 飞思卡尔杯”[M].北京:北京航空航天大学出版社,2007.
[2]杨明,程磊,黄卫华,等.基于光电寻迹的智能车舵机控制[J].光电技术应用,2007,(1).
[3]高月华.基于红外光电传感器的智能车自动寻迹系统设计[J].半导体光电,2009,(1).
[4]周斌,李立国,黄开胜.智能车光电传感器布局对路径识别的影响研究[J].电子产品世界,2006,(9):139-140.
猜你喜欢
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
科技视界(2020年15期)2020-08-04
设备管理与维修(2019年21期)2020-01-06
自动化学报(2019年6期)2019-07-23
文苑(2018年22期)2018-11-19
数字海洋与水下攻防(2018年2期)2018-11-08
电子制作(2018年8期)2018-06-26
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
