感应电机直接转矩控制系统的变结构anti-windup控制器
2013-09-20 05:50:20张兴华聂晶王德明
电机与控制学报 2013年1期
张兴华, 聂晶, 王德明
(南京工业大学自动化与电气工程学院,南京 211816)
0 引言
感应电机直接转矩控制系统的转速调节常采用PI控制器,控制器的输出为参考转矩给定值(电机的输入)。受功率变换器的容量、电机最大输出转矩等因素的影响,参考转矩给定值不能超出预先设定值,即在转速控制环节中包含非线性饱和限幅器。由于转速PI控制器通常在线性区域内设计,不考虑被控对象的输入限制,从而使实际闭环系统达不到依照线性系统设计所应有的控制性能指标。这种由于被控对象的输入限制,使得被控对象的输入,有时与控制器的输出不等,从而使系统闭环响应性能变差(如超调变大,调节时间变长,甚至使系统失去稳定)的现象,称为 windup 现象[1-3]。
为克服windup现象,人们提出一些anti-windup控制技术,主要分为条件积分法(conditional integration)和反计算法(tracking back calculation)两大类[4-6]。前者根据控制器的输出是否受到限幅,有条件地选择使用积分作用项。当控制器饱和时,取消积分作用;而当控制器输出处于线性区时,加入积分作用,以获得优良的稳态控制性能;控制器实际上是在P控制与PI控制之间进行切换,因而该方法属于一类非线性控制方法。后者则是将饱和非线性环节的输入与输出量的差值反馈到积分器的输入端,来减小积分器的输入量,从而抑制windup现象。该方法具有线性结构,是目前工程中常用的antiwindup控制方法[7-9]。但该方法采用分步法进行控制器的设计,因而对系统的稳定性和动态性能缺乏预见性,控制性能严重依赖于反馈增益而不是PI控制器的参数,实际应用中难以定量设计控制系统的性能指标[10]。
本文针对感应电机直接转矩控制调速系统,提出了一种变结构anti-windup速度控制器来抑制windup现象。该方法结合了条件积分法与反计算法的优点,根据PI控制器的输出是否饱和,有条件地将饱和非线性环节的输入与输出量的差值反馈到积分器的输入端,对积分状态进行控制。使控制器在进入饱和区后,能够适时快速地退出饱和区,达到减小超调量,缩短稳态调节时间目的。系统仿真和实验结果表明该方法可有效提高直接转矩控制调速系统的综合控制性能。
1 交流传动系统的windup现象分析
高性能的交流传动系统大都采用双闭环控制结构,由于内环(电流环或转矩环)动态响应速度远大于转速外环,因此,在设计外环转速控制器时,可忽略内环的转矩动态,这样交流调速系统就可由如下的一阶线性微分方程表示

其中:ωr是机械转速,TL是负载转矩,J是转动惯量,τm=J/B为机械时间常数,B为粘滞摩擦系数。
系统控制结构如图1所示。其中Kp、Ki分别为比例和积分增益,q是积分器的输出(积分状态),un是PI控制器的输出(名义控制量),us是被控对象的输入(实际控制量),即转矩参考值us=(以采用直接转矩控制的感应电机驱动系统为例)。且有

其中:umin,umax是饱和限幅器的上、下限幅值,饱和函数 sat(un,umin,umax)=max{umin,min(un,umax)};系统运行时,若umin≤un≤umax(us=un)称为线性区,否则称为饱和区(us≠un)。

图1 饱和限幅PI控制器的结构图Fig.1 Block diagram of PI controller with saturation limits

取PI控制器参数Kp=0.15,Ki=1.2,输出限幅为±3.5 N·m,电机参数见本文第3节。在t=0.05 s时,参考转速由零跃变为100 rad/s,在0.8 s时再跃变为-100 rad/s。图2和图3分别是无输出饱和限幅PI控制和带输出饱和限幅PI控制的转速响应和电机输入与积分器输出。从中可见当系统无饱和非线性限幅时,转速响应满足线性系统设计的性能指标,有较好的动静态控制性能。在引入饱和非线性限幅环节后,转速响应的超调量明显增大了,达到稳态的调节时间也拉长了。这是因为在参考转速发生一个大的阶跃变化时,转速误差将在一段时间内保持为正值,由于PI控制器积分环节的累加作用,积分状态持续增大远远超出饱和非线性的限幅值,而当转速误差变成负值后,由于积分状态值很大,积分器反向积分使积分状态减小而退出饱和区需要较长时间,从而造成系统输出的超调量增大,调节时间加长。因此为获得优良的电机驱动控制性
设电机空载运行(TL=0),若系统运行在线性区,图1表示的交流传动系统的闭环传递函数可写成能,需进行anti-windup控制器的设计。
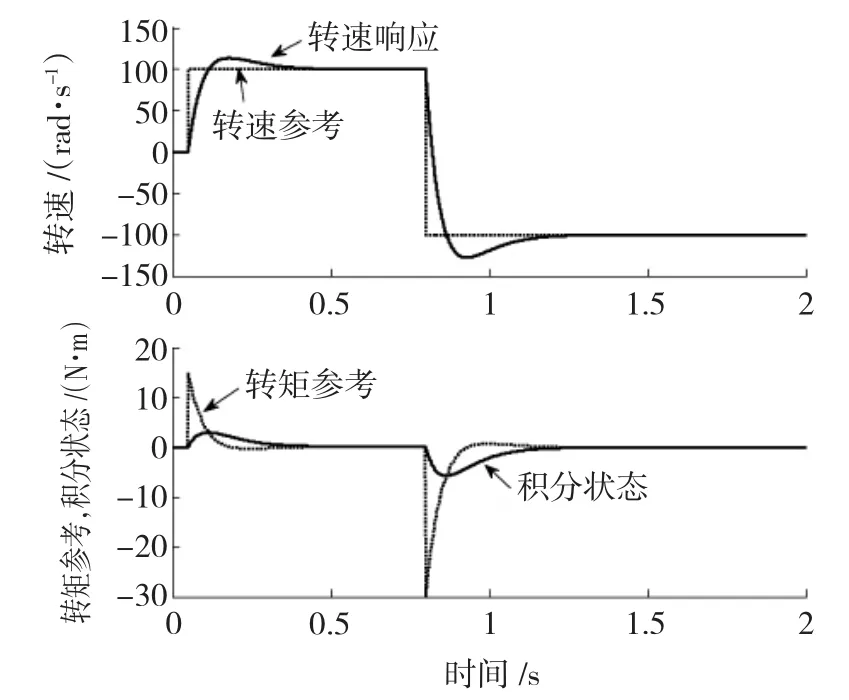
图2 无输出饱和限幅的PI控制曲线Fig.2 Control curves of conventional PI controller
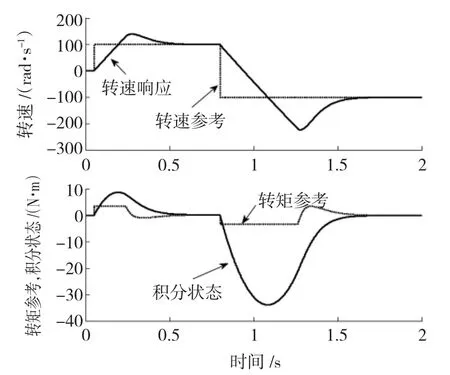
图3 带输出饱和限幅的PI控制曲线Fig.3 Control curves of PI controller with saturation limits
2 anti-windup控制器设计
1)反计算方法
为了克服windup现象,人们提出了许多antiwindup控制方法,其中在电机驱动控制设计中应用最多是反计算法,该控制器的结构如图4所示。反计算方法在PI控制器的输出超越饱和限幅值时,由饱和限幅器的输入与输出的差值产生一个反馈信号来减小积分器的输入,达到抑制积分windup现象的目的。该方法是一种线性控制策略,积分状态q满足

反计算法在饱和补偿增益Ka设置合理的条件下,可以获得优良的控制性能。但控制器的线性结构,使得当控制器输出un在进入饱和区时,误差e和饱和补偿项-Ka(un-us)相互竞争,可能使|unus|继续增加。为此,通常需选择较大的饱和补偿增益Ka,这将不利于控制系统的稳定。实际应用中为选择合适的饱和补偿增益Ka,以获得期望的控制性能指标,通常需要根据经验反复调整Ka的值。

图4 反计算方法的结构图Fig.4 Block diagram of tracking back calculation
2)变结构anti-windup控制器
为提高直接转矩控制系统的转速控制性能,本文提出一种变结构anti-windup控制器,控制器的结构如图5所示。控制器的积分状态满足

这种变结构anti-windup控制器综合了条件积分法与反计算法的结构特点,可有效克服常规anti-windup控制方案的弱点[11]。由于控制器的开关切换特性和饱和误差un-us的反馈作用,控制器的输出un总是保持在饱和限幅区的边界附近。从而使该控制器能够比常规的anti-windup控制器更快地返回到线性区,达到减小超调量和缩短调节时间的目的。实际应用过程中,可以通过选择适当的反馈增益α,控制系统退出饱和区的位置,以获得期望的控制性能指标。

图5 变结构anti-windup控制器的结构图Fig.5 Blcok diagram of variable-structure anti-windup controller
3 系统仿真与实验
3.1 系统仿真
为验证变结构anti-windup控制器的有效性,采用Matlab/SIMULINK建立仿真模型,进行控制算法的仿真验证,并与典型的anti-windup控制器进行对比分析。仿真时的电机参数为:额定功率PN=0.55 kW,额定电压UN=220/380 V,额定转速nN=1 390 r/min,定子电阻Rs=12.8 Ω,转子电阻Rr=4.66 Ω,互感Lm=0.73 H,定子与转子漏感Lls=Llr=0.055 H,转子惯量J=0.005 kg·m2,粘滞摩擦系数B=0.001 N·m·s。
控制系统的结构如图6所示,其中PI控制器的参数采用半经验的方法整定为:Kp=0.15,Ki=1.2;转矩输入限幅为±3.5 N·m,定子磁链给定值为=0.85 Wb,转矩滞环宽度δT=0.2 N·m,磁链滞环宽度为 δλ=0.01 Wb,PWM 采样周期为Ts=100 μs,转速控制周期为10Ts。

图6 带anti-windup PI控制器的直接转矩控制系统Fig.6 Direct torque control system with anti-windup PI controller
电机空载起动,0.05 s时转速阶跃为500 r/min,0.7 s时突加2 N·m的负载,在1 s时转速阶跃为-500 r/min。
图7(a)~图7(c)分别为带输出限幅PI控制、反计算方法(反馈增益Ka=5)和变结构anti-windup控制器的仿真结果,仿真曲线从上至下依次为转速、转矩和积分状态。从中可见,在0.05 s转速给定值发生阶跃变化时,常规积分限幅PI控制的速度响应超调量约为40%,稳定调节时间约为0.7 s;反计算法的速度响应超调量约为10%,稳定调节时间约为0.5 s;变结构anti-windup控制的转速响应无超调,稳定调节时间约为0.4 s。而3种不同控制方法在负载突变时,转速均未有明显的变化,抗负载扰动的能力大致相当。
3.2 实验结果
在理论分析和数字仿真的基础上,本文进行了相应的实验研究。实验系统采用电机控制专用数字信号处理器TMS320F2812为控制器,功率驱动电路采用单相二极管桥式整流器,大电容滤波和三相二电平IGBT逆变器组成。电流电压信号由霍尔传感器检测,增量式光电编码器检测电机转速。实验数据采用TMS320F2812自带RS-232串行通讯口,将实验采集的数据传送到上位机。
实验中采用的电机参数与仿真时相同(但电机等效总转动惯量J因连接了加载磁粉制动器变大了)。速度PI控制器的参数整定为:Kp=0.2,Ki=0.3,输出转矩限幅3.5 N·m;PWM采样周期Ts=200 μs,转速控制周期为10Ts;定子磁链幅值给定为=0.85 Wb,转速给定值为n*=50 rad/s=477.5 r/min;电机带负载起动(负载约为1 N·m)。图8(a)~图8(c)为实验结果,实验曲线从上至下分别为电机转速、电磁转矩和积分状态,从中可见,当电机转速给定值发生阶跃变化时,常规积分限幅PI控制的速度响应超调量为30%,稳定调节时间约为3.5 s;反计算法(反馈增益Ka=1)anti-windup控制器速度响应超调量为26%,稳定调节时间约为2.5 s;而变结构anti-windup控制器,转速响应无超调,稳定调节时间约为1.5 s。显然,本文给出的变结构anti-windup控制器的性能更好。实验结果验证了该方法的有效性。

图7 仿真结果Fig.7 Simulation results

图8 实验结果Fig.8 Experimental results
4 结语
本文针对感应电机直接转矩控制系统转速控制环的非线性饱和问题,分析了积分windup现象对控制系统的影响,给出了一种变结构anti-windup控制器,该控制器结合了条件积分法与反计算法的结构特点,能够有效减小转速响应的超调量,缩短稳定调节时间,提高转速调节的综合性能。且具有结构简单,易于工程实现的优点。
[1]ASTROM K J,RUNDQWIST L.Integrator windup and how to avoid it[C]//Proceedings of the 1989 American Control Conference,June 21 - 23,1989,Pittsburgh,USA.1989:1693-1698.
[2]PENG Y,VRANCIC D,HANUS R.Anti-windup,bumpless,and conditioned transfer techniques for PID controllers[J].IEEE Control Systems Magazine,1996,16(4):48 -57.
[3]TARBOURIECH S,TURNER M.Anti-windup design:an overview of some recent advances and open problems[J].IET Control Theroy and Applications,2009,3(1):1-19.
[4]SHIN Hwibeom,PARK Jonggyu.Anti-windup PID controller with integral state predictor for variable-speed motor drives[J].IEEE Transactions on Industrial Electronics,2012,59(3):1509 -1516.
[5]SHIN Hwibeom.New antiwindup PI controller for variable-speed motor drives[J].IEEE Transactions on Industrial Electronics,1998,45(3):1509 -1516.
[6]齐亮,贾廷纲,侍洪波.永磁同步电机Anti-Windup速度控制器设计[J].电机与控制应用,2011,38(9):17 -20
QI Liang,JIA Tinggang,SHI Hongbo.Design of permanent magnet synchronous motor speed controller based on Anti-Windup[J].Electric Machine and Control Applications,2011,38(9):17-20.
[7]杨明,徐殿国,贵献国.永磁交流速度伺服系统抗饱和设计研究[J].中国电机工程学报,2007,27(5):28 -32.
YANG Ming,XU Dianguo,GUI Xianguo.Study of AC PMSM speed servo system anti-windup design[J].Proceedings of the CSEE,2007,27(5):28-32.
[8]杨明,徐殿国,贵献国.控制系统的 Anti-Windup设计综述[J].电机与控制学报,2006,10(6):622 -626.
YANG Ming,XU Dianguo,GUI Xianguo.Review of control system Anti-Windup design[J].Electric Machines and Control,2006,10(6):622 -626.
[9]CHOI Jongwoo,LEE Sangcheol.Antiwindup strategy for PI-type speed controller[J].IEEE Transactions on Industrial Electronics,2009,56(6):2039 -2046.
[10]周华伟,温旭辉,赵峰,等.一种具有预测功能的抗积分饱和PI速度控制器[J].电机与控制学报,2012,16(3):15 -21.
ZHOU Huawei,WEN Xuhui,ZHAO Feng,et al.Predicative anti-windup strategy for PI-type speed controller[J].Electric Machines and Control,2012,16(3):15 - 21.
[11]HODEL A S,HALL C E.Variable-structure PID control to prevent integrator windup[J].IEEE Transactions on Industrial electronics,2001,48(2):442 -451.
猜你喜欢
系统工程与电子技术(2021年8期)2021-07-27 08:39:18
北京航空航天大学学报(2021年6期)2021-07-20 07:23:56
电子制作(2019年19期)2019-11-23 08:41:36
电子制作(2018年19期)2018-11-14 02:37:02
电子科技(2018年8期)2018-07-23 02:15:28
电测与仪表(2016年24期)2016-04-12 00:21:12
物理化学学报(2015年7期)2015-12-30 12:13:18
电测与仪表(2015年6期)2015-04-09 12:01:12
电子设计工程(2014年18期)2014-02-27 12:00:19
重庆邮电大学学报(自然科学版)(2012年4期)2012-02-23 07:04:58