主动航天服下肢关节电动伺服控制机构研究
2013-09-19 00:51:16张向刚秦开宇
载人航天 2013年5期
郭 庆,张向刚,秦开宇
(电子科技大学航空航天学院,成都,611731)
1 引言
随着人类对太空未知领域的不断探索,航天员在太空的工作空间正在不断地扩大,诸多工作(如航天设施的装配维修、货物运输、察看其他航天器和进行科学试验等)因为其不确定性和复杂性,需要在舱外恶劣环境中进行,这些恶劣的环境包括高真空、高辐射、干燥、温差大等[1-2],而航天服系统是这些操作的基本保证,是载人航天和深空探索的重要设备。
主动航天服不仅能够为航天员提供传统航天服防辐射、生命保障、功效保障3个方面的保障,而且能够增强航天员生理功能,实现感官的延伸,使航天员成为融合了人的智慧和机器力量的超智能体。主动航天服的基本思想是:在现有航天服的基础上运用外骨骼机器人技术,并融入传感、控制、信息等技术,使航天员—航天服系统成为高度人机耦合的复杂力量随动系统。在太空探索中,提高了航天员的承载能力、抓举能力、机动能力和信息处理能力,增强了航天员的恶劣环境适应能力,辅助航天员完成各种深空探索作业。
主动航天服是对目前力量增强型外骨骼助力技术的延伸,帮助航天员实现太空行走、漂浮、舱内作业、舱外机动、月面采矿作业等等。NASA的X1外骨骼服由NASA佛罗里达州的人机认知研究所(Florida Institute for Human and Machine Cognition)和航洋工程空间系统公司(Oceaneering Space Systems in Houston)联合研制,是基于NASA的Robonaut2(国际空间站的第一个人形机器人)。
2000年,美国国防部预研局(DARPA)分别资助了加州大学伯克利分校(U.C.Berkley)的BLEEX外骨骼系统和麻省理工学院(MIT)的类被动骨骼服的研究[3-4];2006年,基于“BLEEX(Berkeley Lower Extremity Exoskeleton)”技术,美国洛克希德·马丁公司(Lockheed Martin)研制成功了“人类万能携行器(Human Universal Load Carrier,HULC)”,HULC 质量 24 kg(53 磅),可携行90 kg(200磅)的物品持续运行3 h。日本筑波大学研制出了世界第1台商业化外骨骼助力装置HAL[5]。俄罗斯正在研制第二代外骨骼助力装备“勇士-21”,可承担步兵大约95%的货物负荷。在我国,2004年,国防科技大学和二炮工程学院开始了力量增强型外骨骼助力技术研究,分别开发了无动力携行辅助器样机。此后,哈尔滨工业大学、华东理工大学、中国人民解放军海军航空工程学院等单位[6-8]也陆续开展了相关技术的研究。周宏[9]于2011年提出了力量增强型下肢外骨骼助力系统的定义:“力量增强型下肢外骨骼助力系统,是以人为控制主体,机器为力量主体,高度人机耦合的复杂力量随动系统。”
本文针对航天员舱内行走运动,设计一套可以驱动主动航天服的电动舵机驱动控制方案,实现下肢髋关节和膝关节随动控制,帮助航天员能够在舱内进行正常的助力行走、助力搬运等作业。
2 主动航天服组成
主动航天服作业系统,由太空和月面人体运动规律建模分系统、机械结构子系统、动力与能源分系统和感知控制分系统组成。NASA X1空间主动外骨骼服外形如图1所示。X1采用联合设计模式将外骨骼与航天服材料结合,增加了目前航天服机动和负重能力。X1包括机械结构装置、感知与控制系统、动力系统4个分系统。机械结构装置采用仿生技术实现航天员承载与携行功能,感知与控制系统实现主动航天服携行随动与太空主动作业需求。动力系统将电能转化为机械能输出,作为执行机构。能源系统提供长效能源。

图1 NASA X1空间主动外骨骼服Fig.1 X1 active exoskeleton spacesuit of NASA
3 控制机构系统方案设计
3.1 关节运动规律分析
如果航天员在舱内需要以3 km/h的速度行走,则髋关节角度变化曲线如图2所示。
以1个步态周期Tgait为例,对髋关节角度变化规律进行拟合,表示如下:
① 当t<0.5Tgait时,


图2 单个周期髋关节角度在矢状面内的变化规律Fig.2 Hip angle variation in sagittal plane for a gait cycle
② 当t>0.5Tgait时,

对以上两个关节分别求一阶和二阶导数,可以得到髋关节角速度ωh(t)、髋关节角加速度αh(t)随时间变化规律。
同理,可以得到膝关节角度θk(t)、角速度ωk(t)以及角加速度αk(t)变化规律。建立主动航天服关节动力学模型表示为:

其中q=[θh,θk]T=[ωh,ωk]T,=[αh,αk]T,T=[Th,Tk]T为执行机构作用在主动航天服上的关节力矩。H(q)为惯性矩阵,C(q是Coriolis项,是重力项。
考虑航天员下肢大小腿与主动航天服机械装置的大小腿耦合参数之后,将θk(t)、ωk(t)以及αk(t)变化规律代入,可以得到主动航天服行走过程中髋关节和膝关节处的动态负载扭矩Th,Tk。以髋关节为例,其动态负载扭矩变化规律如图3所示。
由图3可知,髋关节的最大扭矩Thmax=93 Nm出现在摆动相阶段,最大转速为rhmax=27 r/min。
髋关节运动的角功率在一个行走步态周期内变化规律如图4所示。
由图可知,髋关节运动的最大角功率为Phmax=409 W。
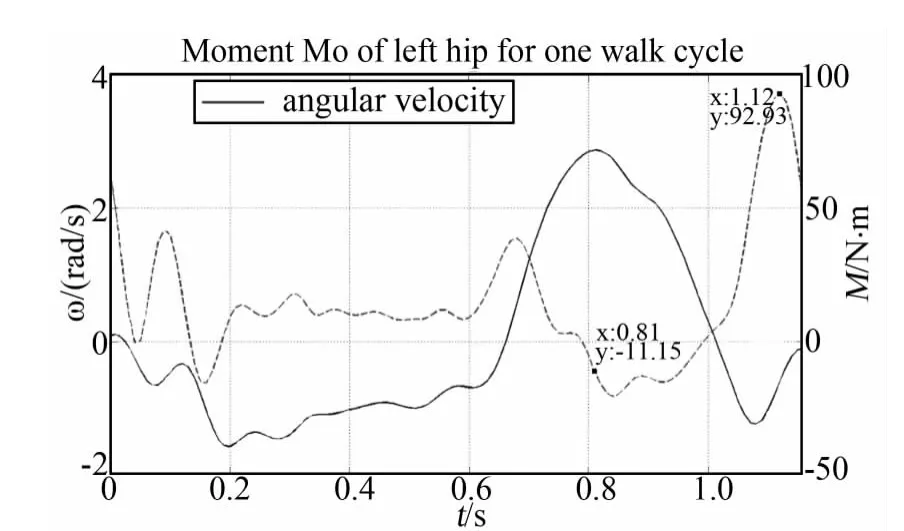
图3 髋关节角速度与扭矩变化规律Fig.3 Hip joint angular velocity and torque variation
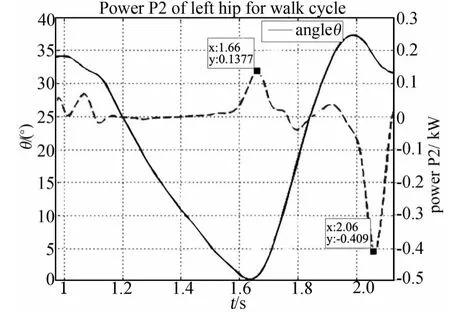
图4 髋关节角功率变化规律Fig.4 Hip angular power variation
3.2 关节电机与减速器选型设计
假设电机效率为0.85,减速器传动效率为0.9,因此电机额定功率表示为:

因此选择一款盘式电机,额定功率Pnh=550 W,额定转速为rnh=3500 r/min,扭矩Tnh=1.5 Nm。
要保证关节输出大扭矩要求,需要配置减速器,因此髋关节的减速器的减速比表示为:

因此选定一减速器,减速比μh=100。最大输出扭矩为Thout=191 Nm,满足:

同理,摆动相阶段的髋关节最大扭矩Tkmax=30 Nm,额定转速为rkmax=71 r/min。膝关节运动的最大角功率为Pkmax=45 W。所需电机额定功率为:

因此选择一款盘式电机,额定功率Pnk=250 W为,额定转速为rnk=4000 r/min,扭矩Tnh=0.6 Nm。髋关节的减速器的减速比表示为:

因此选定一减速器,减速比μh=50。最大输出扭矩为Tkout=91 Nm,满足:

4 关节运动控制建模
4.1 电机负载运动建模
当以关节屈伸角θ为作为输出量时,减速器输出轴上的关节旋转角运动模型表示为:
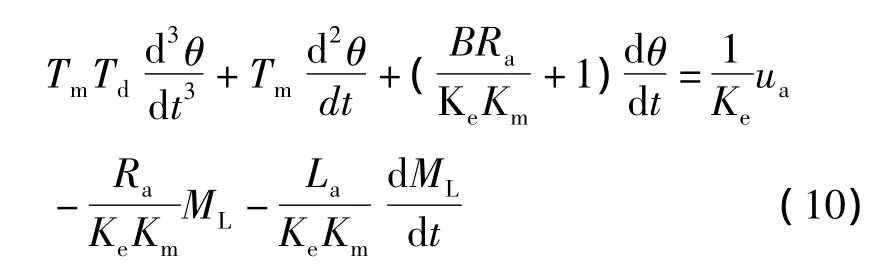
其中ML为关节轴上的负载扭矩,ua为控制电压,Ke为电机反电动势系数,Km为电机电磁转矩系数,B为将电机折合到减速器输出轴上的阻尼系数,Ra为电枢电阻。模型参数Tm、Td表示为:

其中La为电机的电枢电感,J为电机折算到减速器轴上与髋关节机械结构合成的转动惯量。
4.2 关节角度控制规律设计
采用PID控制方法设计髋关节和膝关节电机控制规律,表示为:
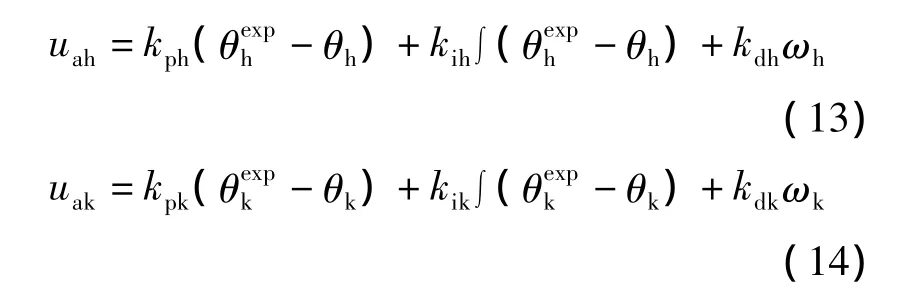
其中uah、uak为两个关节电机的驱动控制电压,kph、kih、kdh为髋关节 PID 控制参数;kpk、kik、kdk为膝关节PID控制参数、为期望髋关节和膝关节角度变化,由3.1节拟合给出。θh、θk为关节实际角度,由关节编码器测量得到,ωh、ωk为关节旋转角速度,由大小腿角速度陀螺仪测量得到。
5 仿真结果
对主动航天服动力控制机构进行关节运动控制数字仿真。分别在髋关节和膝关节处加入动态负载扭矩如图3和图4所示,验证设计的控制律正确性。其中髋关节额定电压Unh=48 5 V,反电动势系数Keh=0.756,电磁转矩系数Kmh=0.114;电枢电阻Rah=3.636 Ω,电枢电感Lah=0.0055 H,髋关节轴等效后的转动惯量Jh=3.611 kg·m2,阻尼系数Bh=0.35。膝关节额定电压Unk=24 V,反电动势系数Kek=0.318,电磁转矩系数Kmk=0.047;电枢电阻Rak=1.86 Ω,电枢电感Lak=0.0055H,髋关节轴等效后的转动惯量Jk=0.435 kg·m2,阻尼系数Bk=0.0875。控制参数kph=1,bkih=0.1,kdh=0.3;kpk=4,kik=1,kdk=1。
髋关节期望角度和实际角度变化曲线如图5所示,对应的控制电压变化曲线如图6所示。膝关节期望角度和实际角度变化曲线如图7所示,对应的控制电压变化曲线如图8所示。
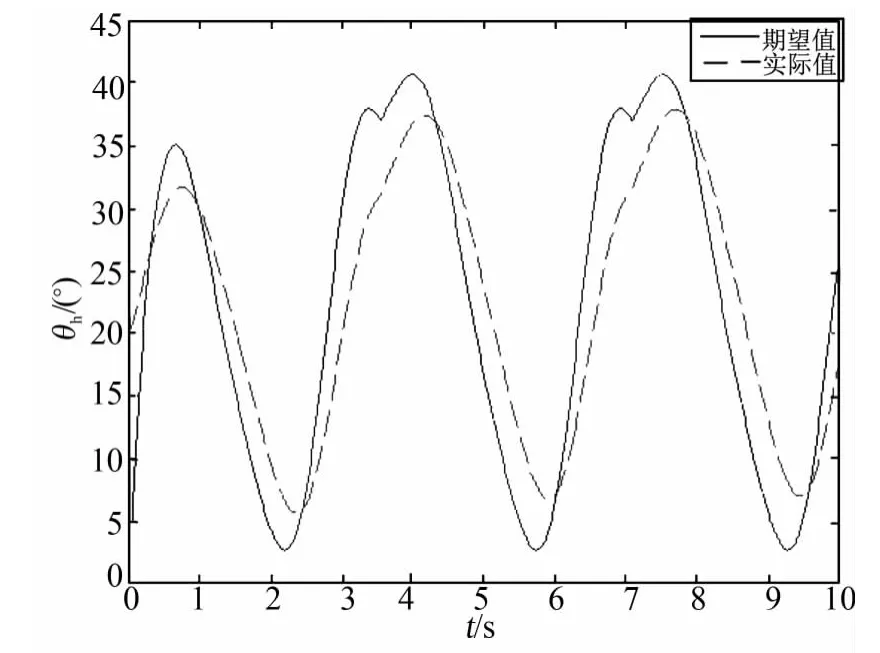
图5 髋关节期望角度和实际角度变化曲线Fig.5 Hip desired angle and the actual angle curve
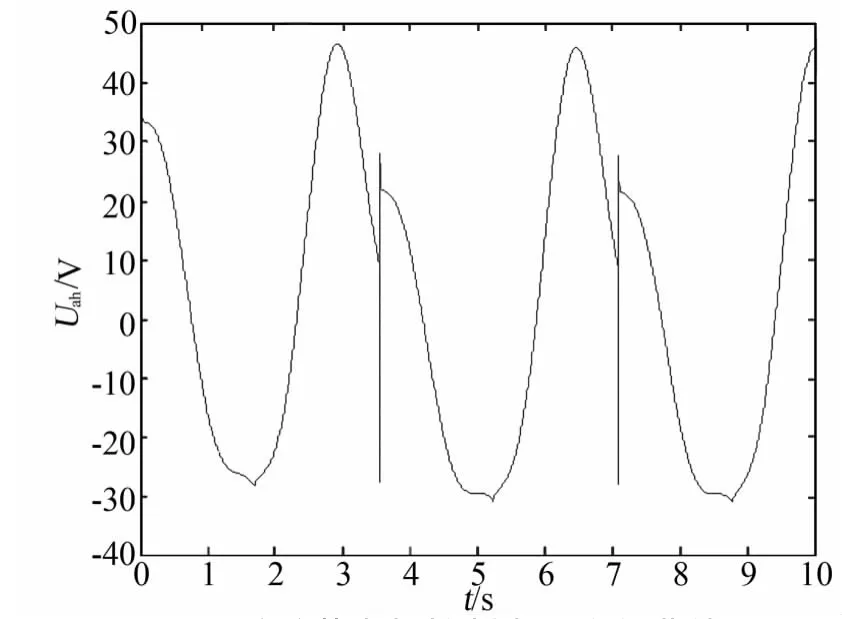
图6 髋关节电机控制电压变化曲线Fig.6 Hip curve of the motor control voltage

图7 膝关节期望角度和实际角度变化曲线Fig.7 Knee desired angle and actual angle curve

图8 膝关节电机控制电压变化曲线Fig.8 Knee curve of motor control voltage
由图可知,设计的控制律可以保证关节角度跟踪期望步态角度的变化,控制量不饱和,表明髋关节和膝关节控制律能够满足稳定跟踪航天员步态运动控制需求。
4 结论
本文介绍了一种应用于主动航天服系统中的控制执行机构设计选型方案。通过分析航天员行走步态,计算出关节动态扭矩变化,以此作为电机角度控制回路的输入;通过设计关节角度控制律使膝关节和髋关节角度变化能够进行随动控制,为研制具有高机动性、高负载能力和一定防护能力的主动航天服提供技术支撑,以全面提高航天员的太空及月面的综合活动能力。
[1] 梁志伟,高峰,吴志强,等.“飞天”舱外航天服便携式生保系统研制[J].载人航天,2010,16(1):37-43.
[2] 王岩松,石培新,张峰.国外载人航天出舱活动故障综述[J].载人航天,2008,14(2):4-8.
[3] John Ryan Steger.A design and control methodology for human exoskeletons[D].Berkeley:University of California.2006:36-44.
[4] 王智鑫.雷声公司推出XOS2第二代外骨骼装置[J].轻兵器,2010(24):44-47.
[5] Veneman JF,Ekkelenkamp R,Kruidhof R,et al.Design of a series elastic-and Bowden cable-based actuation system for use as torque-actuator in exoskeleton-type training[J].International Jounal of Robotics Reseach,2006,25(3):261-281.
[6] 孙立宁,李庆玲,孔民秀,等.5-DOF上肢康复机械臂交互式康复训练控制策略[J].机械工程学报,2008,44(9):169-176.
[7] 曹恒,孟宪伟,凌正阳,等.两足外骨骼机器人足底压力测量系统[J].传感技术学报,2010,23(3):326-330.
[8] 杨智勇,张远山,顾文锦,等.骨骼服灵敏度放大控制方法研究[J].计算机仿真,2010,27(1):177-180.
[9] Zhu Jiayuan,Zhou Hong.Realization of Key Technology for Intelligent Exoskeleton Load System[C]//2011 2nd International Conference of Electricaland Electronics Engineering.December 1-December 2,Macau,China,2011.
猜你喜欢
课堂内外·初中版(科学少年)(2025年2期)2025-02-28 00:00:00
军事文摘(2024年6期)2024-02-29 09:59:38
军事文摘(2022年24期)2022-12-30 11:43:50
小哥白尼(野生动物)(2021年12期)2021-03-29 01:15:34
高师理科学刊(2020年2期)2020-11-26 06:01:16
铁道通信信号(2019年10期)2019-11-25 09:40:54
军事文摘(2018年24期)2018-12-26 00:57:40
现代商贸工业(2016年35期)2016-04-09 06:59:58
百科探秘·航空航天(2015年7期)2015-05-30 10:48:04
发明与创新(2015年25期)2015-02-27 10:39:14