
一种单站被动式光学测距系统
2013-09-18 08:55王陆王艺梅
长春理工大学学报(自然科学版) 2013年5期
王陆,王艺梅
(长春理工大学 光电工程学院,长春 130022)
现有获取目标位置信息的方法主要分为主动式测距和被动式测距两种。主动式测距大部分是通过发出某特定波长的电磁波,并通过回波与出射波的时间差推导出探测器与被测目标之间的距离。例如,激光测距、超声波测距等。该方法由于是主动发出探测波,所以容易被对方截获,并加以利用。被动式测距主要是通过接收被测目标所发出的某一特定波段的信号,从而达到对目标测距。现有被动式测距系统往往采用多系统立体式探测的方法,通过坐标系解算从而得到被测目标的相应信息[1]。例如双平台被动测距等。但是此类传统测距系统机构复杂,造价较高,不利于机动探测。
本文提出的单站被动式光学测距系统是以周扫描系统为基础,通过半反半透镜对光学系统进行“镜像”,从而虚拟出另一套成像光学系统,并根据坐标系推导解算出探测器与被测目标之间的角度信息和距离信息,从而达到单站被动测距的效果[2]。该系统方法简单,移动性好,适用于红外、激光、可见、紫外等多种系统。
1 单站被动式光学测距系统
1.1 测距原理
最为经典和复杂的被动探测系统即为“人眼”。它通过两只眼睛的相互配合从而达到对目标进行空间定位的效果。
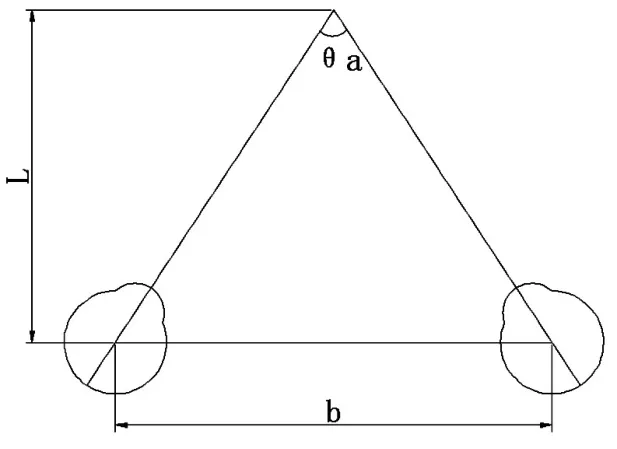
图1 人眼立体视差示意图
若物点A到基线的距离为L,则视差角θα为:
不同距离的物体对应不同的视差角,其差异Δθα称为“立体视差”。传统的被动测距系统正是参考该原理,通过建立双站或者多站被动式光学测距系统,对同一目标进行观测,从而推导出基线与目标的距离和方位、俯仰角度等信息[3]。然而,该方式需要两套或更多固定在特定位置上的测距系统进行组合测距。对于人力和物力的耗费都比较大,并且只能对特定区域进行覆盖,不利于机动探测。
故此,文中提出了一种通过同一探测系统经折反系统对同一物体从不同角度进行二次探测方法,从而达到人眼立体成像的效果[4]。该方式可以独自完成被动测距,机构简单、造价低廉,便于机动探测,如图2所示。
1.2 系统组成与公式推导
系统主要由周扫描系统、光阑、半反半透镜、光学成像系统等组成。在光学成像系统前方以一定距离处(此处以45°为例)放置一个半反半透镜(保证系统二个光路全部无遮挡。),并在半反半透镜前分别放置一个可变光阑[5]。周扫描系统正常工作情况下(主光阑开启,侧光阑关闭。),当探测到目标并记录下目标方位角α1后(可由转台读出方位角),将系统进入第二圈周扫状态(同时关闭主光阑,开启侧光阑。),记录下被测目标第二次的方位角α2。
已知,光学成像系统的焦距 f′,半反半透镜与探测器的距离D,被测物体与半反半透镜片的距离为L,根据正弦定理可知:
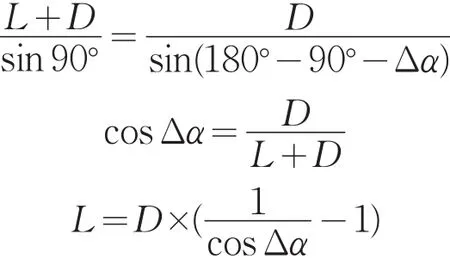
文中为处理方便,选取了特定位置进行计算,取Δα=|α2-α1|。在实际探测中,由于目标出现的位置不定,应根据目标的位置具体分析。
2 探测距离与误差分析
2.1 极限探测距离
其中β为转台稳定精度。
2.2 定位误差
假设转台精度为0.01°,D为300mm,当目标出现在近距离L1=10m的位置时,根据公式可知Δα=88.330955,则

同理,当目标处于极限探测距离1.719km时,根据公式可知Δα=89.99°,则
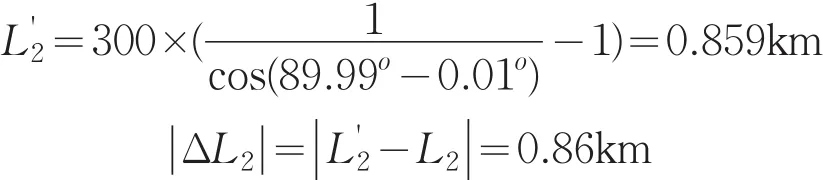
由此可见,定位误差主要有转台稳定精度和反射镜与光学系统间距决定[6],且探测距离越近,定位精度越高。最大误差出现在极限探测距离处。
2.3 反射镜安装误差
2.3.1 偏转误差
当反射镜俯仰方向存在±0.1°的偏差时[7],由于该测距系统对距离信息的探测主要依据水平方向上的角度差,所以俯仰方向的角度误差对于距离探测影响不大。
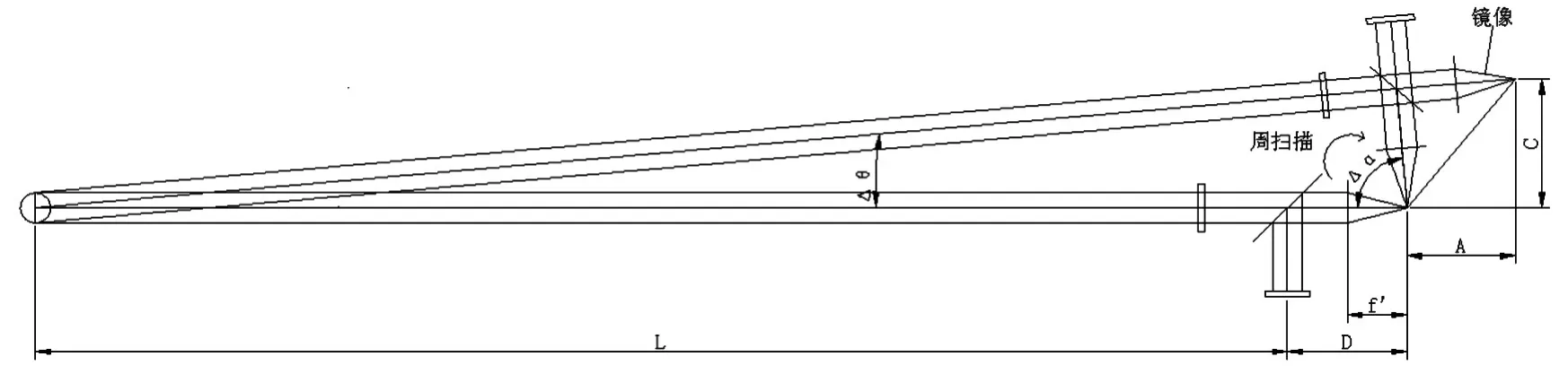
图2 单站被动式测距系统示意图

图3 反射镜水平偏转示意图
当反射镜水平方向存在0.1°的偏差时反射镜偏转0.1°,光线偏转0.2°,如图3所示,由以下公式:
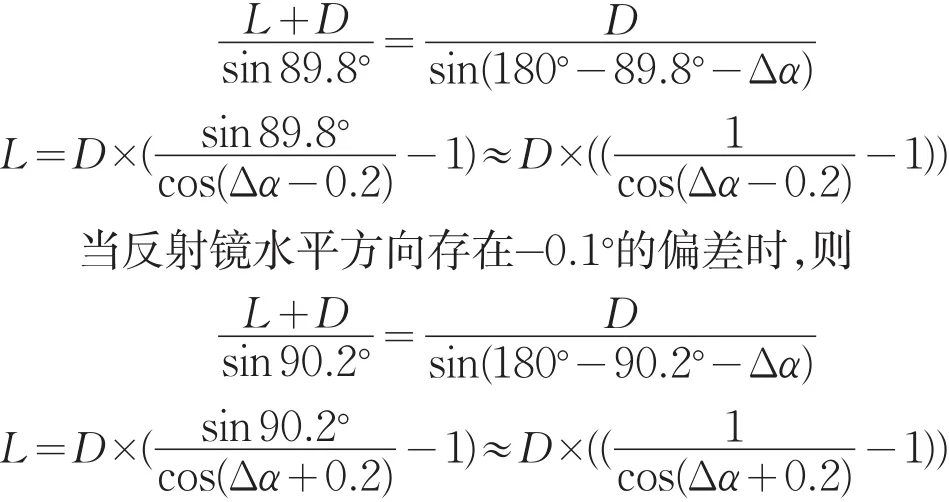
以上可知,在不同探测距离会相应出现0.2°时所对应的距离误差。
2.3.2 位置误差
当反射镜由于安装误差而导致前后移动ΔD时,则

当 D=300mm,ΔD=10mm,Δα=89.99时,根据上式可知

由此可知,在此种单站被动式光学测距系统中,反射镜前后位置和横向位置的略微变化对探测距离影响不大。
3 结论
该方法具有简单易用,移动性强的特点。但是其缺点也同样是明显的,那就是探测距离比较近,并且只有在近距离探测时误差才会比较小。
不过,如果用该方法结合图像处理或者人工辅助图像标识的的话,可以隐蔽、快速的对方位360°全视场内所有近距离物体进行三维立体成像[1]。从而时现对目标外形特征的建模。
[1]付小宁,吴德怀.只测角的单站三维红外被动测距算法[J].兵工学报,2008,29(10):1188-1191.
[2]路远,凌永顺,吴汉平,等.地面目标的红外被动测距研究[J].红外与毫米波学报,2004,23(1):77-80.
[3]刘科,谢敬辉,李卓.被动式光学测距误差分析[J].光学技术,2005,31(4):586-591.
[4]梅逐生.光电子技术[M].北京:国防工业出版社,2004:87-91.
[5]王志坚.光学工程基础[M].北京:兵器工业出版社,2005:98-101,136-139.
[6]王之江,顾培夫.实用光学技术手册[M].北京:机械工业出版社,2007:333-342.
[7]郁道银,谈恒英.工程光学[M].北京:机械工业出版社,2004:125-128.
猜你喜欢
新能源科技(2022年9期)2022-11-20
——2022 F1意大利大奖赛
世界汽车(2022年5期)2022-06-10
老年医学研究(2021年5期)2022-01-19
加油站服务指南(2021年7期)2021-10-14
雷达与对抗(2021年4期)2021-03-18
建材发展导向(2021年24期)2021-02-12
环境技术(2020年1期)2020-03-06
江西建材(2018年2期)2018-04-14
光学精密工程(2016年6期)2016-11-07
光学精密工程(2016年1期)2016-11-07
