
多目标控制电梯群控调度算法的优化*
2013-09-15 09:22:38郑永康王瀚韬
机电工程 2013年8期
李 强,郑永康,王瀚韬
(1.杭州电子科技大学 智能与软件研究所,浙江 杭州 310018;2.杭州优迈科技有限公司,浙江 杭州 310052)
0 引 言
电梯群控系统(EGCS)是指采用优化的控制策略来协调多台电梯的运行,其核心是群控调度算法,它对所采集到的电梯群状况和呼梯信号进行分析综合,按规则发出派梯信号,协调电梯运行。EGCS能大大提高电梯的运输效率和服务质量,是目前电梯节能的主要手段。
目前电梯群控调度算法中,在控制目标上侧重各不相同,如“时间最小/最大”群控算法、“相对时间因子”群控算法等侧重于乘客待梯时间的优化,“综合服务成本”群控算法等侧重于能量消耗最优化[1]。但这些算法的控制目标均有不足之处,侧重于某一类因素,并未全面考虑到在不同的交通模式下对不同控制目标的侧重是不同的。在控制策略上群控算法引入了各种智能技术,如专家系统(Expert System)、模糊逻辑(Fuzzy Logic)、人工神经网络(Artificial Neural Net⁃work)及遗传算法(Genetic Algorithm)等[2-4]。但它们本身具有局限性,神经网络需要大量输入/输出数据,训练时间长,易陷入局部极小;遗传算法对新空间的探索能力有限,容易收敛到局部最优解;模糊规则比较难于建立。
本研究提出一种综合考虑乘客的平均候梯时间(AWT)、乘客长候梯率(LWP)和能量消耗(RNC)的多目标控制电梯群控算法。它根据电梯交通客流数据进行交通模式识别,给予3个目标不同权重;根据电梯运行数据采用模糊推理来获取这3个目标的评价指标;针对模糊推理缺乏学习性的特点,利用鱼群算法用于组合优化具有较快的收敛速度的优点,引入鱼群算法用于多元线性回归,得到计算评价指标可信度的决策函数,最终根据这3个目标的评价指标的加权平均值决定派梯方案。
1 鱼群算法原理
人工鱼群算法是李晓磊等人[5]于2002年在对动物群体智能行为研究的基础上提出的一种新型仿生优化算法,该算法根据“水域中鱼生存数目最多的地方一般就是本水域中富含营养物质最多的地方”这一特点来模仿鱼群的觅食行为而实现寻优。人工鱼群算法采用自上而下的寻优模式,从构造个体的底层行为开始,通过鱼群的觅食、聚群及追尾行为改变自身的位置,经过一段时间各人工鱼移动到局部极值点,最终从人工鱼局部寻优中找到全局最优值。
人工鱼个体可以用面向对象的方法来构造。它的主要属性有鱼的当前状态、移动步长、感知范围和当前食物浓度,主要行为有移动、追尾、聚群、觅食和行为的自适应评价。根据目标函数,人工鱼群算法评价所处位置不同行为的食物浓度值,并针对不同问题选择合适的行为采取行动。通常情况下,该算法比较觅食、聚群、追尾行为的食物浓度值,选取优于当前食物浓度值的最优行为采取行动,若这三者行为的食物浓度值均不优于当前的浓度值,则采取随机移动行为。最终,人工鱼会集结在几个局部极值的周围,这有助于判断并获取全局极值。
由于鱼群算法在全局寻优方面的良好性能,对它的研究应用已经渗透到多个应用领域,如对配电网进行无功优化[6]、航班路径规划[7]和图像配准[8]等。
2 群控算法的总体设计
该电梯群控算法首先确定以AWT、LWP和RNC为控制目标,并将这3个目标的可信度指标的加权平均值作为目标函数;根据电梯交通客流数据进行交通模式识别,给予3个目标不同权重w1,w2,w3;对电梯运行数据进行采集计算,得到与这3个目标相关的4个输入变量:厅层召唤等待时间(HCWT)i、厅层召唤最大等待时间(maxHCWT)i、剩余响应能力(CV)i和召唤集中程度(GD)i,再利用模糊推理得到这3个目标的可信度数据作为学习样本,针对各个目标分别利用人工鱼群算法进行训练,获得决策函数;以决策函数作为计算可信度的标准,根据4个输入量得到这3个指标的可信度,最后通过加权平均,将呼梯信号指派给可信度最高的那台电梯。多目标控制群控调度算法的原理如图1所示。

图1 基于鱼群算法的多目标控制群控调度算法原理示意图
3 多目标控制群控算法的设计
3.1 多目标控制函数
多目标控制函数可表示为:

式中:SAWTi—第i台电梯AWT的可信度;SLWPi—第i台电梯LWP的可信度;SRNCi—第i台电梯RNC的可信度;Si—第i台电梯的可信度;wi—权重,wi∈[0,1],且w1+w2+w3=1。
通过电梯运行经验数据分析和借助电梯专家的经验,不同交通模式下的各个控制目标的权重推荐数值如表1所示[9]。

表1 各目标在不同交通模式下的权重
3.2 模糊推理
本研究中的模糊推理采用Mandani[10]方法。首先,根据呼梯信号和电梯状态计算各个输入量,根据隶属度函数计算它们在语言变量大、中、小上的隶属度;再根据模糊规则表计算每条规则的适用度和模糊输出值;最后,计算得出每个目标的可信度指标。
3.2.1 输入量的计算
与电梯的各个控制目标AWT、LWP、RNC有关的输入变量是 HCWTi、maxHCWTi、CVi、GDi,它们是从电梯呼梯信号与电梯状态等信号经采集与计算得到。
厅层召唤等待时间(HCWT)i:新的呼梯信号从产生到被第i台电梯响应的等待时间,包括电梯的运行时间和轿厢的停靠时间。
厅层召唤最大等待时间(maxHCWT)i:第i台电梯已登记的所有召唤命令和新登记召唤命令的最大等待时间。
剩余响应能力(CV)i:第i台电梯登记了新的呼梯信号后,对未来呼梯的响应能力。
召唤集中程度(GD)i:新的呼梯信号所在楼层位置与第i台电梯已经登记的所有呼梯命令(包括外召和内召)产生楼层位置的最短距离。
3.2.2 结合模糊推理获得学习样本
人工鱼群算法的学习样本,是通过模糊推理得到的一部分数据。进行模糊推理前,必须先对这4个输入变量进行模糊化,即确定隶属函数。模糊化要根据输入量的取值范围、系统的需求来确定。
下面分别确定 HCWTi、maxHCWTi、CVi和 GDi的隶属函数[11]:
(1)HCWTi的模糊化。根据调查,乘客在候梯时心理的焦躁程度和候梯时间成一定关系,用模糊术语S(small)、M(medium)、L(lagre)描述变量,分别表示“小”、“中”、“大”,这些模糊概念可以用如图2所示的隶属度函数图来描述。
(2)maxHCWTi的模糊化。一般而言,群控系统的厅层召唤最大等待时间不应该超过90 s,当其值在40 s以内较优,在60 s左右乘客也是可以接受的,其隶

图2 HCWTi的隶属度函数
属度函数如图3所示。

图3 maxHCWTi的隶属度函数
(3)CVi的模糊化。单位时间内未进入轿厢的人数越多,说明电梯的剩余响应能力越小,高峰期电梯的剩余响应能力一般不应超过80%,其隶属度函数如图4所示。

图4 CVi的隶属度函数
(4)GDi的模糊化。界定当GD的值小于0.3,电梯的能耗比较理想,当大于0.7时,电梯的能耗会比较大,其隶属度函数如图5所示。
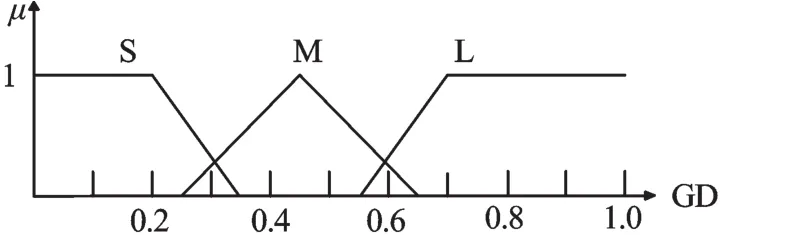
图5 GDi的隶属度函数
结合电梯专家的知识和经验,输入变量与目标的可信度推理关系为:SAWTi由 HCWTi和 CVi决定,SLWPi由 maxHCWTi和 CVi决定,SRNCi由 maxHCWTi和 GDi决定。
归纳其模糊规则如图6所示。

图6 目标可信度的模糊规则图
4 鱼群算法对模糊推理线性回归曲线的优化
4.1 优化方法
根据HCWT、maxHCWT、CV、GD,本研究利用上节所述的模糊推理规则获得SAWTi、SLWPi和SRNCi,并作为可信度数据的学习样本,借助人工鱼群算法的全局搜索能力,获得计算它们的决策函数,可以克服模糊推理缺乏学习能力的缺点。HCWT、maxHCWT、CV、GD既是样本数据获取的基础,也是人工鱼群算法的输入。当人工鱼群算法训练完毕,即可获得相应可信度的决策函数。此后,在群控调度计算派梯方案时,就可以根据决策函数直接计算得到每台电梯的指标可信度。
由SAWTi、SLWPi和SRNCi数据组成n组样本数据xi∈X=Rn,yi∈Y=Rn,i=1,...,n,试建立它们之间的线性回归方程,即决策函数为:

以基于人工鱼群算法作为群控中采用的算法,并建立相应的决策机制,学习数据通过模糊推理得到,训练阶段的关键步骤如下:
Step1:采集呼梯信号以及各台电梯状态信息;
Step2:计算HCWT、maxHCWT、CV、GD的值;
Step3:模糊推理获得相应的SAWTi、SLWPi和SRNCi的值;
Step4:重复Step1到Step3,直到获得预定数量的数据后,根据图6中的关系,划分为(HCWT,CV,SAWTi),(maxHCWT,CV,SLWPi)和(maxHCWT,GD,SRNCi)3个集合的相应学习样本;
Step5:训练3个学习样本集合相应的人工鱼群直至收敛;
Step6:保存人工鱼群寻优相关结果。
4.2 鱼群算法的设计
在训练阶段,最重要的一个步骤是用人工鱼群算法实现多元回归决策函数的求解。本研究采用鱼群算法优化这个多元线性回归函数中的b0,b1,b2,b3,b4参数。设计食物浓度函数为:

目前,还没有一般的解析方法能够对离散人工鱼群算法的trynumber、visual、number、maxgen等重要参数进行确定,所以只能通过先保持其他参数不动,然后再对每一参数进行调整来观测其对算法性能的影响。经多次试验分析,选取鱼群规模m=100,最大迭代次数gen=100,拥挤度因子δ=0.618,感知范围visual=10,步长step=3,试探次数trynumber=200。
鱼群算法具体步骤如下:
Step1:选择合适的鱼群参数,包括鱼群规模num⁃ber,试探次数trynumber,最大迭代次数 maxgen,人工鱼的感知范围visual等;
Step2:根据选定的参数,随机生成指定数目的人工鱼个体,用于鱼群的初始化;
Step3:选取鱼群中最大的食物浓度,将其放入到公告板中;
Step4:对于每条人工鱼执行以下操作:
(1)分别计算觅食行为、追尾行为、聚群行为的食物浓度,选取三者的最优浓度值,若其值比当前状态的浓度值更优,则向最优行为方向前进,否则执行随机行为。
(2)更新当前人工鱼的食物浓度值,如果其值小于公告板中的最大食物浓度值,则对公告板中的最大值进行替换。
Step5:判断是否所有人工鱼都进行了寻优,是则转Step6;否则转Step4;
Step6:调用基于人工鱼群算法完毕,返回公告板中的值,即公告板中的最优值即为要求的最优值,其对应的人工鱼即为最优的参数。
5 仿真评测实验
为准确方便地评价群控算法的优劣,本研究用Visual C#2010开发了一个电梯群控仿真平台。该平台能设置不同的建筑物和电梯参数来动态构成测试环境,通过DLL接口导入不同的群控算法,模拟不同的交通模式生成客流数据,对群控算法进行调度仿真和实时评测。
本研究在该电梯群控仿真平台上对该算法优化前后进行了评测与对比分析。设定建筑物层数为16层,楼层高度为4 m,电梯数为4台,电梯额定载客量为18人。额定速度为3 m/s,加速度为1 m/s2,加加速度率为2 m/s2,开门时间为2 s,关门时间为1 s,保持时间2 s。交通流数据:上行高峰(8∶30~9∶30,总1 000人/次)。经72个小时的客流数据对算法进行训练,并对优化前后的多目标控制群控算法进行评测。评测数据如表3所示。
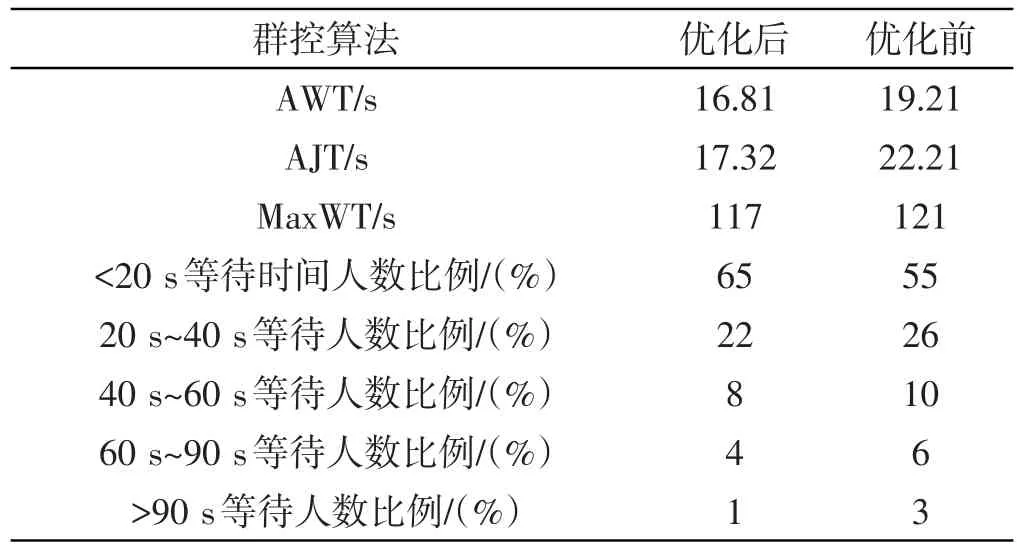
表3 优化前后的群控算法性能指标比较
优化后的模糊控制算法相比优化前的模糊控制算法在平均候梯、平均乘梯时间、长候梯率分别减少12.49%、22.11%、44.44%,且电梯能耗减少18.51%。可见相比优化前的模糊控制算法,优化后的模糊控制算法存在一定优越性。
6 结束语
本研究综合考虑了电梯运行效率、服务质量和能耗方面的3个指标,并将其作为电梯群控的目标。针对模糊推理缺乏学习性的特点,在评价函数的计算方式中引入了人工鱼群算法多元线性回归,通过训练人工鱼群算法得到计算目标可信度的决策函数,并将之应用到群控决策中。经电梯群控仿真平台的评测,该模糊控制调度算法经鱼群算法的优化,平均候梯、平均乘梯时间、长候梯率和能耗指标都比优化前有明显的改善。
下一步的工作是群控仿真平台上试验鱼群算法不同配置参数对群控算法的优化效果,选取最佳的配置参数进行训练鱼群算法,并将优化后的群控算法用于实际的群控系统。
(References):
[1]杨祯山,邵 诚.电梯群控技术的现状与发展方向[J].控制与决策,2005,20(12):1321-1330.
[2]IMRAK E C.Artificial neural networks application in du⁃plex/triplex elevator group control system[J].Journal of Mechanical Engineering,2008,54(2):103-114.
[3]LU Y,MABU S,ZHANG T T,et al.Multi-car elevator group supervisory control system using genetic network pro⁃gramming[J].IEEE Congress on Evolutionary Compu⁃tation.2009,12(5):242-255.
[4]许玉格,罗 飞,曹建忠.目的层预约的模糊神经网络电梯群控策略[J].华南理工大学学报:自然科学版,2007,35(1):13-18.
[5]李晓磊,邵之江,钱积新.一种基于动物自治体的寻优模式:鱼群算法[J].系统工程理论与实践,2002,22(11):32-38.
[6]袁 远.基于改进人工鱼群算法的配电网无功优化[D].南京:南京理工大学动力工程学院,2008.
[7]杨 丽.基于人工鱼群算法的图像配准的研究与实现[D].西安:西安电子科技大学机电工程学院,2009.
[8]刘李钊.基于鱼群克隆遗传算法的配电网络重构研究[D].长沙:中南大学信处科学与工程学院,2011.
[9]秦 臻.基于SVM的电梯群控系统(EGCS)算法的研究[D].杭州:杭州电子科技大学机械工程学院,2011.
[10]张 昆,段其昌,张从力.基于模糊控制的多目标电梯群控技术[J].仪器仪表学报,2004,25(4):248-251.
[11]张绘敏.基于模糊控制的电梯群控算法研究[D].兰州:兰州交通大学自动化与电气工程学院,2011.
猜你喜欢
军事文摘(2022年8期)2022-11-03 14:22:01
小学科学(学生版)(2021年3期)2021-04-13 08:26:18
哈哈画报(2021年11期)2021-02-28 07:28:45
小学生学习指导(低年级)(2018年3期)2018-01-31 02:18:58
中外文摘(2017年19期)2017-10-10 08:28:41
中华老年口腔医学杂志(2016年1期)2017-01-15 14:24:42
小学生时代·综合版(2016年7期)2016-05-14 17:53:49
电测与仪表(2016年3期)2016-04-12 00:27:44
电测与仪表(2016年20期)2016-04-11 11:38:08
红蜻蜓·低年级(2015年11期)2016-02-02 10:54:54
