基于DSP 的仿人形假手控制系统研究*
2013-09-13 06:07张可科熊蔡华熊大柱
机电工程 2013年4期
张可科,熊蔡华,贺 磊,熊大柱
(华中科技大学 机械科学与工程学院,湖北 武汉 430074)
0 引 言
理想的假手应在形状和功能上与真手一样,它不仅能替代人手的感觉和运动功能,而且还要像人手一样具有优美的外形,但目前的技术还远远达不到这个理想的要求[1]。
随着机器人技术的飞速发展,一些研究者试图研制出更加精巧的灵巧手,研究的方法和手段主要包含4 个方面:①人手基本生理结构的研究;②手爪模拟人手的结构和功能;③手爪感知系统的研究;④手爪控制方法的研究。目前该研究已取得了一些重要的成果,相继有一批著名的多关节多指灵巧手问世。作为残疾人假肢使用的假手,如加拿大的TBM 手[2],英国的I-limb 手[3]等,其结构简单,体积重量与人手相近,具有装饰功能。目前已投入使用的商用假手多数只有1~3 个自由度。国内哈尔滨工业大学和德国宇航中心最新研制了集成度和拟人化程度高的五指仿人手,该手具有很强的操作能力,但质量有1.5 kg[4],不适用于假肢场合。为了实时、有效地控制机器人多指手,机器人多指手自由度不宜过多[5]。最近有研究称假肢手的最佳驱动数为3 个[6]。为了减少驱动数,一些假肢手尝试用一个电机驱动同时驱动拇指的弯曲和侧摆,例如MANUS 手[7],但是传动机构过于复杂。
传统驱动方式控制电路复杂、体积大,影响控制的可靠性,软件设计工作量也大[8-9]。Shigeo Hirose 于1978 年首先提出了绳索式欠驱动机构,奠定了欠驱动研究的基础。欠驱动的基本原理是系统的驱动数少于自由度数。本研究将假手引入欠驱动机构,欠驱动机构的优势是给控制系统带来了方便,实现单个电机驱动多个自由度,实现对各种物体的包络自适应抓取。采用欠驱动机构设计原理后,外围电路简单,可靠性高,减少了电路板的尺寸。
基于上述思想,本研究对欠驱动假肢手进行相关硬件电路的设计和软件的编写,并对假手中使用的压力传感器进行标定,在此基础上,对生活中不同物体进行包络抓取和捏取实验。
1 多自由度假手系统介绍
1.1 假手整体概述
为了完全仿人手,假肢手的设计要求为:体积小、重量轻、外形拟人;假肢手采用欠驱动机构,能完成各种日常的抓握操作。
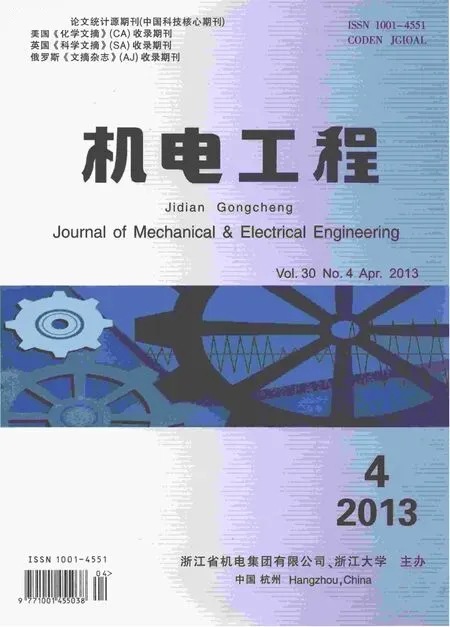
本研究所研制的欠驱动耦合假手如图1 所示。它共有5 根手指,拇指2 个关节,其他手指各3 个关节,还包括拇指的侧摆运动,共15 个活动关节,总重量约为550 g;和人手相比,其尺寸、重量和成年人人手相近。
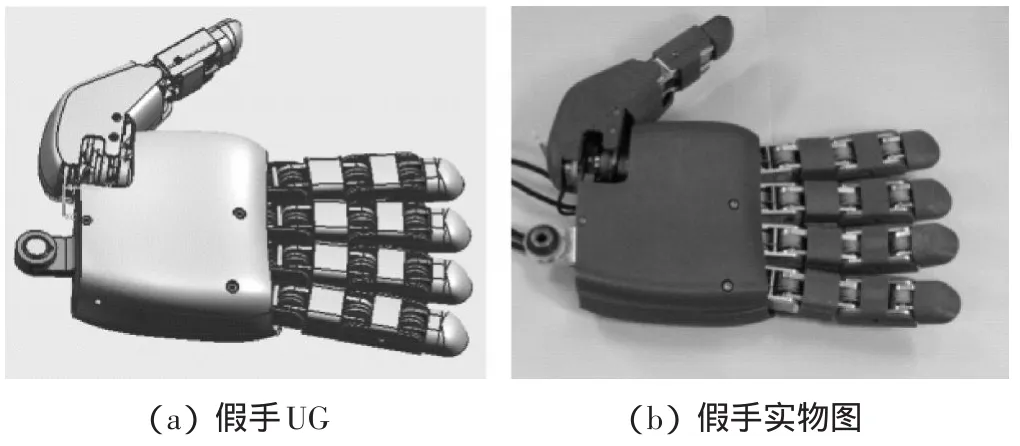
图1 欠驱动耦合假手
整个手掌15 个自由度仅用3 个电机驱动,机械结构主要包括:手指欠驱动机构、两手指间差动机构、大拇指侧摆机构。食指与中指由一个步进电机驱动,无名指与小指由另一个步进电机驱动,通过移动滑轮差动机构来实现一个电机驱动两个手指。拇指通过将槽轮结构和曲柄连杆结构耦合,实现了仅用一个电机驱动拇指的侧摆和弯曲两个方向的运动。
本研究选用的步进电机具有自锁功能,以螺杆作为电机输出轴,在电机外部通过一个外部驱动螺母和螺杆相啮合从而实现直线运动。这样做的优点是大大简化了设计,使得系统能够在不安装外部机械联动装置的情况下直接使用直线步进电机进行精密的线性运动。传感器和电机都安装在手掌内部,减少钢丝绳路径布置的难度。
1.2 假手手指机构方案选择
手指机构方案有两种:绳索滑轮驱动式和连杆驱动式。绳索滑轮驱动式特点:结构紧凑,关节力臂恒定,手指输出力较小;连杆驱动式特点:结构不紧凑,关节力臂不恒定,手指易出现奇异形位,手指输出力较大[10]。最后假肢手选用绳索驱动方案。因为这种手指机构在抓握物体时,手指能够自动调节关节角度,完成对物体的包络,增加抓握的稳定性。
2 控制系统设计
假手控制系统设计的目标是:手指能够实现多种抓取模式;控制各手指电机运动,完成闭环力控制;对其硬件要求是体积小、功耗低的嵌入式控制系统。
仿人手的控制系统结构如图2 所示。系统以微处理器DSP TMS320 F2812 为核心,实时地对传感器信号进行处理,完成各手指动作的协调运动及运动控制算法。
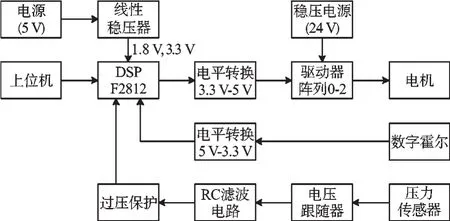
图2 假手控制系统结构
2.1 硬件实现
仿人手控制系统完成了手指的位置和压力信号采集,以及整个手掌的抓握控制。大拇指使用有刷直流伺服电机,实现拇指的侧捏与弯曲运动;其余手指使用直线步进电机,实现手指的抓握运动。DSP 的事件管理器(EV)产生3 路独立脉冲信号给3 个电机驱动器,模/数转换器(ADC)接收压力传感器的模拟信号;通用输入/输出(GPIO)接收8 个霍尔传感器的开关信号。事件管理器A(EVA)的定时器1 用于启动A/D;EVA 的定时器2 用于产生脉冲信号给拇指伺服电机;事件管理器B(EVB)的定时器3、4 用于产生脉冲信号给手指的步进电机。
2.1.1 电平转换电路
由于DSP 的输入/输出引脚电平都是3.3 V,而霍尔输入及电机脉冲信号和方向信号需要5 V,本研究需要设计3.3 V 和5 V 的电压转换电路[11]。
把8 路霍尔传感器的5 V 电平转化为DSP 可以接收的3.3 V 电平的电路,如图3(a)所示。因为霍尔元件是漏极开路的,该电路需要上拉电阻。转换芯片SN74AHC541 同时起到降压和缓冲的作用。
图3 电压转换电路
3.3 V-5 V 电压转换电路如图3(b)所示。芯片左端为DSP 输出信号为3.3 V,经过SN74HCT541 转化为5 V后,输出给3 个电机的脉冲输入端和方向控制端,其中步进电机还具有使能端。
2.1.2 传感器选择及其处理电路
假手中用到8 个数字霍尔传感器,其中6 个用来判断手指弯曲的极限位置,2 个用来判断拇指处于侧捏还是抓握状态。数字霍尔用在驱动传动机构中,用来限定电机螺杆上螺母的运动范围,使其在电机导螺杆的两个极限位置之间运动,以免损伤螺杆螺纹或其他零件。该装置结构紧凑,适合于假手这种狭小空间的应用场合。
假手在抓取物体时,不只是通过机械位移夹取物体,在夹取物体时力反馈也很重要。假手的力反馈由压力传感器(FSR#400,Interlink Electronics)来实现[12]。传感器厚度薄、直径小,数据处理比较简单,适合于假肢手的场合。
力传感器采集被抓取物体的信息,并将物体的信息传递给控制系统,以此来优化电机控制策略。整个机械手共使用了3 个压力传感器。电机螺母通过带动滑块上的滑轮可以使手指弯曲,通过测量螺母和滑块之间的压力可以间接测量出电机的驱动力。
FSR 信号处理电路如图4 所示。为了避免对被采集的模拟信号产生干扰,调理电路的输入阻抗需要非常大。电压跟随器用于缓冲压力传感器的输入信号;RC 滤波器用于滤除高频毛刺干扰;二极管起钳位作用,防止模拟信号超出0~3.3 V 范围。
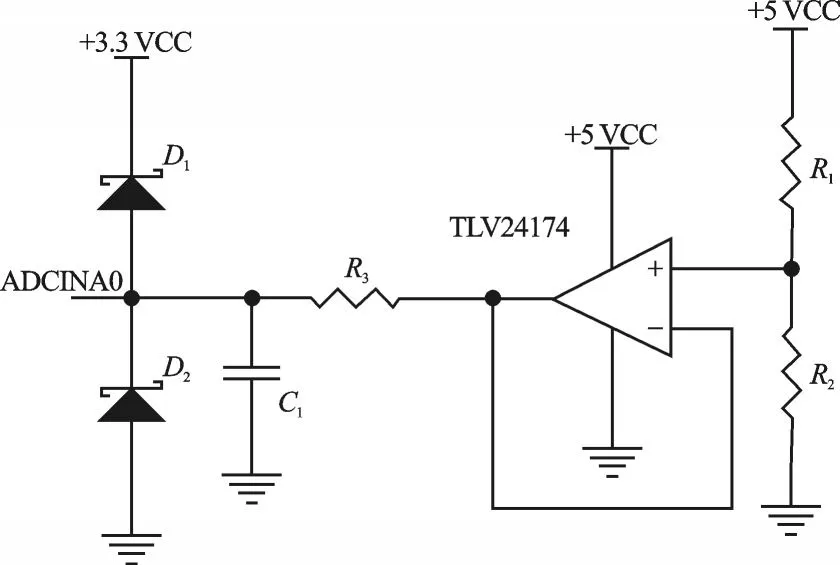
图4 FSR 信号调理电路
经过信号处理电路后,DSP 接收到的是电压值,所以为了得到压力的大小,研究者必须做FSR 的标定实验。本研究在FSR 的受力表面上分别加各种型号的砝码。通过Matlab 拟合得到一条对数曲线,如图5 所示。
曲线方程为:Vout=1.4976 ×ln(FFSR+1)
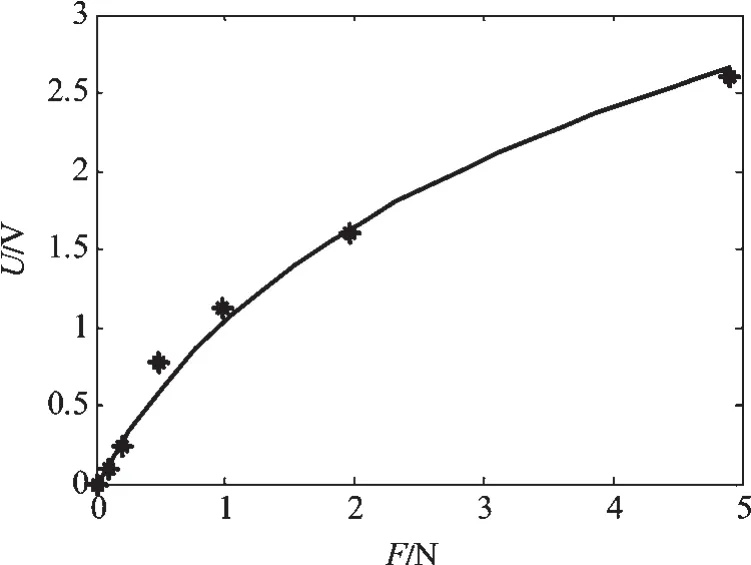
图5 FSR 输出电压随压力的变化曲线
2.2 软件实现
电机控制方式包括位置控制、速度控制和力矩控制3 种,由于包络抓取最后电机的位置不确定,本研究采用速度控制的方式来控制电机。软件实现主要涉及EV、ADC 和GPIO 模块[13-14]的应用。
本研究选用通用定时器中断事件的方法来启动ADC 模块的转换。系统初始化完成后,定时器T1 开始计数,等到周期中断时启动ADC 转换,进入ADC 中断;在ADC 中断程序中,DSP 将ADC 转换后的数字量信息经过一些预处理得到实时的电机端驱动力状态信息。ADC 采样时执行过采样算法,程序中对每个通道采样3 次,3 次采样平均值比单次采样精度高。同时,本研究实现了运动控制算法,控制电机速度随所测压力值的增大而减小,最后通过压力值的变化情况判定假手是否实现稳定抓握,稳定则电机停止运转。
程序流程图如图6 所示。
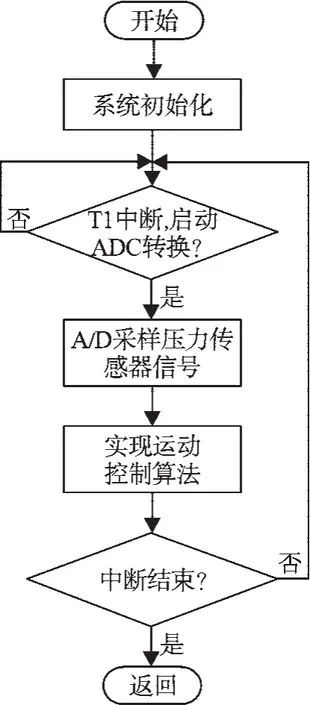
图6 控制软件流程图
3 假手的抓握实验
根据前文所述的假手控制系统的设计,笔者研制出了假手样机,并进行了以下实验:①抓取效果测试;②验证力反馈的必要性。
3.1 抓取效果测试
本研究通过基于电机输出力的反馈信号,对假手进行了柔顺控制,进行了大量的抓取物体试验。假手抓握和捏取实物实验如图7 所示。该假手分别对大球、方笔筒、圆筒杯子进行包络抓取,对小球进行捏取。
试验结果表明:对于不同形状、不同材质的物体,不管是抓握还是手指捏取,该假手都能达到满意的抓握效果。
3.2 验证力反馈必要性
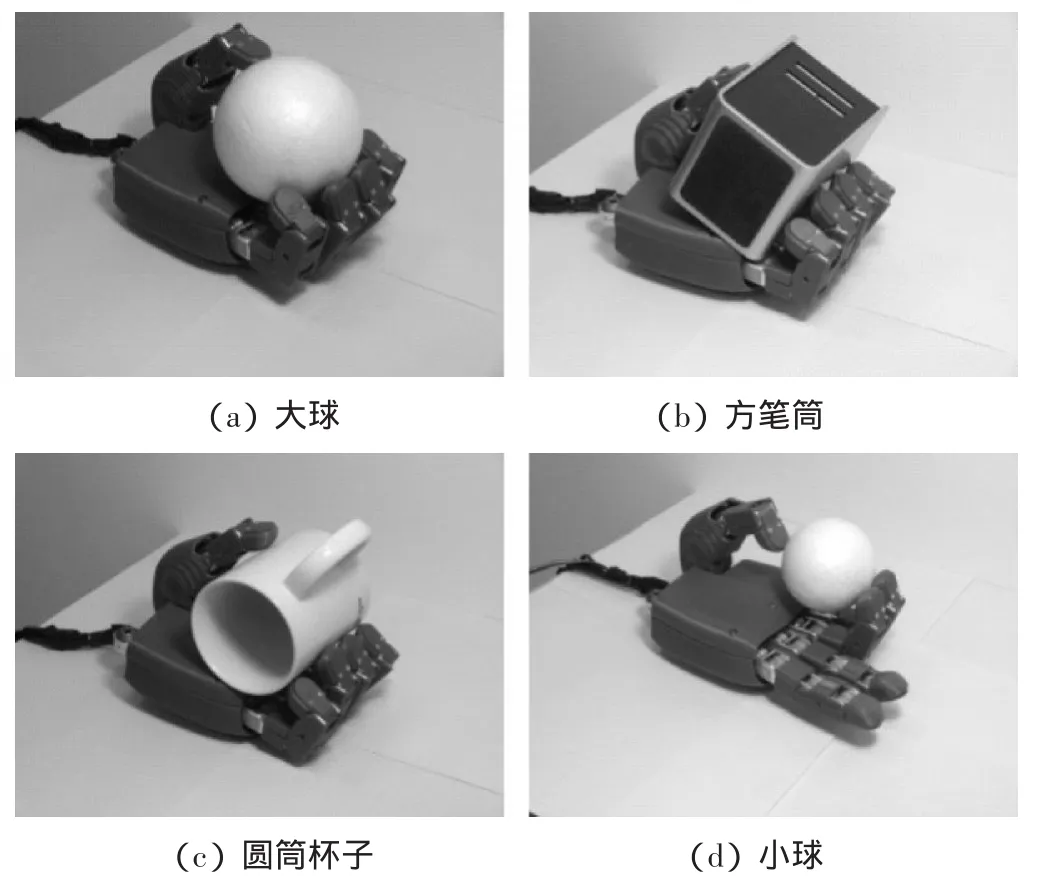
图7 假手抓握和捏取实物实验
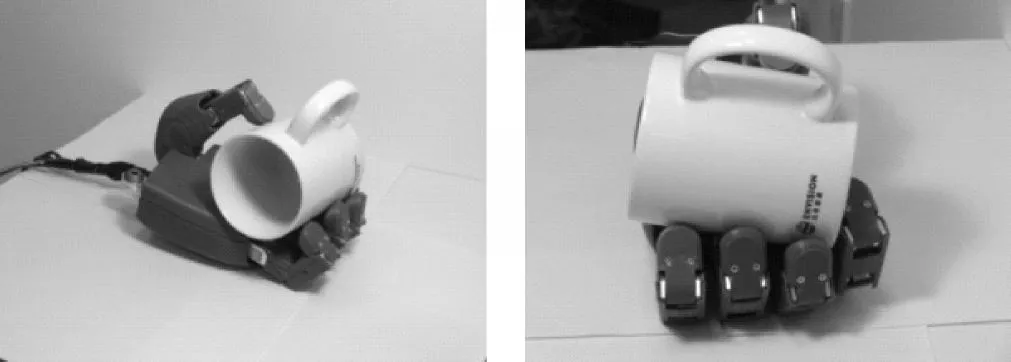
图8 假手无力反馈时抓握杯子
实验中,本研究对相同物体分别采用了有力反馈和无力反馈的两种控制模式。无力反馈时圆筒杯子抓握情况如图8 所示。通过和有力反馈圆筒杯子抓握情况(如图7(c)所示)对比,假手在包络杯子后,由于没有力反馈信息,电机仍然拉动手指继续弯曲,手指用力过大,导致杯子滑向一侧,难以实现稳定抓取。
4 结束语
本研究介绍了欠驱动假手的机械结构,然后在该基础上提出了结构简单、开发周期短、具有力反馈的控制系统,完成了控制系统的软、硬件设计,最后,进行了抓握效果测试和验证力反馈必要性的实验。实验结果说明该欠驱动假手能够实现包络自适应抓取,基于传感器反馈的控制策略使得假手能够实现稳定抓取。
下一阶段需要在实验结果的基础上,优化控制策略,使机械手能够尽可能多地复现人手常用的各种模式,并能对这些模式给出力学性能方面的评价。
(References):
[1]郑修军,张 键,陈中伟,等.肌电假手的研究现状[J].中国康复医学杂志,2003,18(3):168-170.
[2]DECHEV N,CLEGHORNW L,NAUMANN S.Multiple fin⁃ger,passive adaptive grasp prosthetic hand[J].M echanism and M achine Theory,2001,36(10):1157-1173.
[3]CONNOLLY C.Prosthetic hands from touch bionics[J].In⁃dustrial Robot,2008,35(4):290-293.
[4]刘 宏,姜 力.仿人多指灵巧手及其操作控制[M].北京:科学出版社,2010.
[5]熊有伦,熊蔡华.机器人多指抓取的研究进展和展望[J].华中科技大学学报:自然科学版,2004,32:5-10.
[6]MARIAPPAN M,JAN SM M,IFTIKHAR M.A Novel ap⁃proach for classification of underactuated mechanism in myoelectric hand[J].American Journal of Biomedical Engineering,2011,1(1):35-40.
[7]PONS J L,ROCON E,CERES R,etal.The MA⁃NUS-HAND Dextrous robotics upper limb prosthesis:Me⁃chanical and manipulation aspects[J].Autonomous Ro⁃bots,2004,16(2):143-163.
[8]林德龙.舵机驱动仿生四足机器人设计[J].机械,2011,38(2):66-69.
[9]程卫卫,韩建海,陈 捡.下肢行走康复训练机器人机械结构设计[J].机电工程技术,2011,40(9):77-79.
[10]MASSA B,ROCCELLA S,CARROZZA M C,etal.Design and Development of an Underactuated Prosthetic Hand[C]//Proceedings of the 2002 IEEE International Confer⁃ence on Robotics&Automation,Washington DC:[s.n.],2002:3374-3379.
[11]Texas Instruments Incorporated.Selecting the right lev⁃el-translation solution[M].Texas Instruments Incorporated,2004.
[12]Interlink Electronics Incorporated.Force sensing resistor in⁃tegration guide and evaluation parts catalog.[EB/OL].[日期不详].http://www.interlinkelectronics.com.
[13]Texas Instruments Incorporated.TMS320x281x DSP Event Manager(EV)Reference Guide[M].Texas Instruments In⁃corporated,2007.
[14]Texas Instruments Incorporated.TMS320x281x DSP Ana⁃log-to-Digital Converter(ADC)reference guide[M].Texas Instruments Incorporated,2005.
猜你喜欢
海外星云(2021年6期)2021-10-14
中外文摘(2020年19期)2020-10-31
重型机械(2019年3期)2019-08-27
儿童故事画报(2019年5期)2019-05-26
测控技术(2018年5期)2018-12-09
意林·全彩Color(2018年7期)2018-08-13
电子制作(2018年9期)2018-08-04
浙江大学学报(工学版)(2016年9期)2016-06-05
中国康复理论与实践(2015年7期)2015-05-09
环球时报(2014-01-06)2014-01-06