类扑翼飞行器及其叶片流场特性研究
2013-09-13 06:06张玉华
机电工程 2013年4期
张玉华,代 强,周 进
(1.安徽工业大学 机械工程学院,安徽 马鞍山 243032;2.山推工程机械股份有限公司,山东 济宁 272000)
0 引 言
扑翼飞行器是模仿昆虫或鸟类拍翅运动而设计的,它具有垂直起降、悬停、各向运动等功能。相对于固定翼和旋翼飞行器,扑翼飞行器具有结构简单、质量轻、成本低、效率高等诸多优点。因此,扑翼飞行器在国防和民用领域具有广泛的应用前景。
扑翼飞行器主要是靠叶片拍动而产生升力,扑翼高效运动的实现是扑翼飞行器的难点。目前世界各国都投入了大量的人力、物力对扑翼飞行器进行研制。美国佐治亚理工学院和英国剑桥大学共同研制了靠往复化学肌肉驱动扑翼上、下拍动产生动力的微型扑翼飞行器Entomopter[1],加州理工学院研制的“微型蝙蝠”扑翼飞行器[2]是利用钛合金骨架蒙以聚合物薄膜构成的机翼,多伦多大学的大型人工动力扑翼飞行器“雪鸟”采用翼尖具有一定柔性的机翼产生升力。国内对扑翼飞行器的研究较晚,但也取得了很大的成果,南京航空航天大学、东南大学、北京航空航天大学等也研制了各种扑翼飞行器,其中南京航天航空大学研制的弧度型扑翼飞行器比直翼型扑翼飞行器提供的升力更大[3]。
无论是国外柔性机翼还是国内弧度型机翼的扑翼飞行器,它们注重对动物肢体运动的单纯模仿,需要专用的扑翼机构将发动机的转动转换成扑翼的上、下摆动。为了简化扑翼机构的结构和运动控制,本研究采用半转机构[4]及内凸轮啮合传动[5]设计一种新型的扑翼飞行器,其叶片做不对称的“拍动”,称为类扑翼飞行器;基于提出的类扑翼飞行器的结构组成,分析叶片运动原理,揭示该飞行器的升力特性和机动性控制机制;建立叶片流场的有限元分析模型,通过数值计算和仿真分析,探索叶片流场、叶片结构和升力之间的变化规律,旨在为类扑翼飞行器的设计奠定理论基础。
1 结构组成与叶片运动原理
类扑翼飞行器由机体、中心轴、回转架、叶片及销齿轮、内凸轮、锥齿轮及主传动系统、控制系统等组成[6],三维模型图如图1 所示。

图1 类扑翼飞行器三维模型图
叶片及其轴端固连的销齿轮支撑在回转架的转臂两端,销齿轮与内凸轮啮合,构成叶片运动的半转机构。同一侧半转机构中两叶片的相位差始终为90 °。当回转架转动时,叶片绕中心轴公转的同时绕自身轴线进行自转,自转角速度为公转角速度的1/2,且转向方向相同。叶片的旋转运动合成产生类似扑翼“拍动”的效果。
主动力通过锥齿轮啮合传递给机体两侧的半转机构,产生大小相等、方向可变的升力。两侧半转机构共用一个动力系统,转向相反。这样既能保证推进力方向一致,又能保证两侧半转机构产生的惯性力矩相互平衡。
内凸轮、大齿轮和控制机构等组成升力方向控制系统。机体两侧的控制机构分别改变内凸轮的初始位置,叶片产生的升力方向将随内凸轮的转角而实时变化。当机体两侧的升力方向垂直向上时,可实现垂直升降;升力同时向前或向后偏转可实现前后移动;升力异向偏转可实现转向运动。
2 叶片流场分析建模
叶片是类扑翼飞行器提供升力的主要部件,为了分析叶片升力的产生机制和变化规律,研究者需要对叶片周围的流场环境进行建模,以获得合理的叶片流场特性计算模型。
2.1 流场计算区域的确定
类扑翼飞行器有两组对称于机体的半转机构,它们的结构完全相同,机体两侧叶片布置相位差为90 °。当叶片同步转动时,机体两侧叶片产生的主升力矢量是相同的,不妨以机体一侧的运动双叶片为建模对象。考虑到叶片的轴向长度大于径向尺寸,叶片轴端的流体对叶片升力的影响较小,为了简化计算,笔者将叶片的流场分析模型简化为平面模型[7]。根据对半转机构的运动分析,叶片在公转一周的过程中,叶片自转半周。叶片周围的流体随着双叶片的位置和各点的速度变化产生复杂的流动。
为了模拟不同区域的流体运动,本研究将双叶片及其周围环境划分为4 个区域,双叶片流畅区域与有限元网格如图2 所示。图中,outer 为外部环境,该区域半径在保证不影响域流场特性情况下,尽量选用较小半径,以减少计算量。mid 为叶片的公转区域,In1 和In2 分别为两个叶片的自转区域。为了较为准确地模拟区域内流体的流动,两个自转区域半径分别比叶片的宽度稍大一些,并且保证两区域间留有间隙,mid 区域要将两自转区域包含在内,并留有间隙。
2.2 网格划分及边界条件
由于叶片与流体的接触边界是曲线,网格类型采用平面三角形网格,有利于提高计算的速度和精度并保证网格结构的规则性。考虑叶片在静止的流场中开始运动,由于两个叶片的相互作用,自转区域和公转区域的流场变化较大,而outer 区域的相对较小。考虑到叶片边缘的厚度较小,In1 和In2 区域的网格大小(interval size)设置为1,mid 区域和outer 区域的网格分别为2 和3,如图2 所示。

图2 双叶片流场区域与有限元网格
假设叶片在流体运动中变形较小,不考虑流固耦合的影响,本研究分别将两个叶片的所有边指定为wall;将自转区域与mid 区域,mid 区域与outer 区域的接触边分别定义接触类型为interface;并将In1、In2、mid 以及outer 区域介质设置为fluid。
本研究在Fluent 软件[8]中根据叶片的运动设置上述各区域的边界条件,设置In1 和In2 区域绕各自中心自转并相对于mid 区域公转,且自转角速度为公转角速度的1/2 且方向相反;对叶片wall 设置为相对于各自的自转区域自转,自转角速度为零。mid 区域设置为绕该区域的中心转动,转速与自转区域的公转速度相等;outer 区域设置为静止。
2.3 计算模型
在计算区域,叶片的公转及自转使得流体作不规则运动。在叶片转动过程中,流体速度会随着叶片转角的改变而改变,每一时刻的速度和加速度有所不同。因此,在模拟分析叶片流场特性时,本研究采用Fluent 的瞬态湍流计算模型[9-10]。
3 叶片流场特性计算与分析
设叶片公转转速为-100 r/min,两叶片自转转速为50 r/min。计算时,时间步长设为0.01 s,步数为60步,使叶片公转一周,完成一个运动周期的流场特性计算。叶片从左侧垂直位置顺时针公转,公转过程中叶片绕自身轴线逆时针自转。
为了研究叶片流场特性,本研究计算了3 种不同机构参数的叶片在一个周期内的流场变化规律。
机构参数如表1 所示。通过分析可得到较为合理的叶片尺寸及布置关系。
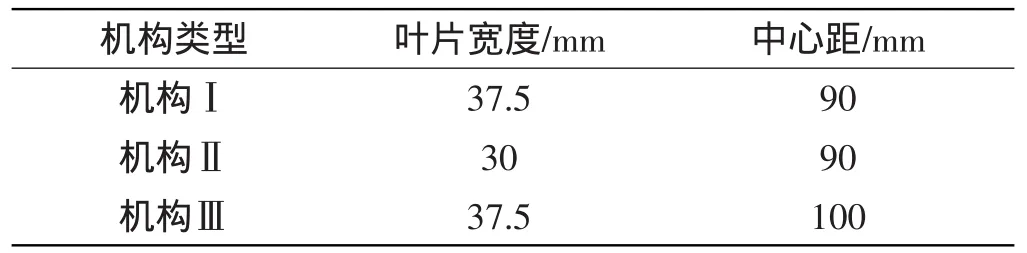
表1 3 种机构参数
3.1 叶片周围速度矢量分布
叶片转动0 °、45 °、90 °、135 °时周围流场的速度矢量分布图如图3 所示。
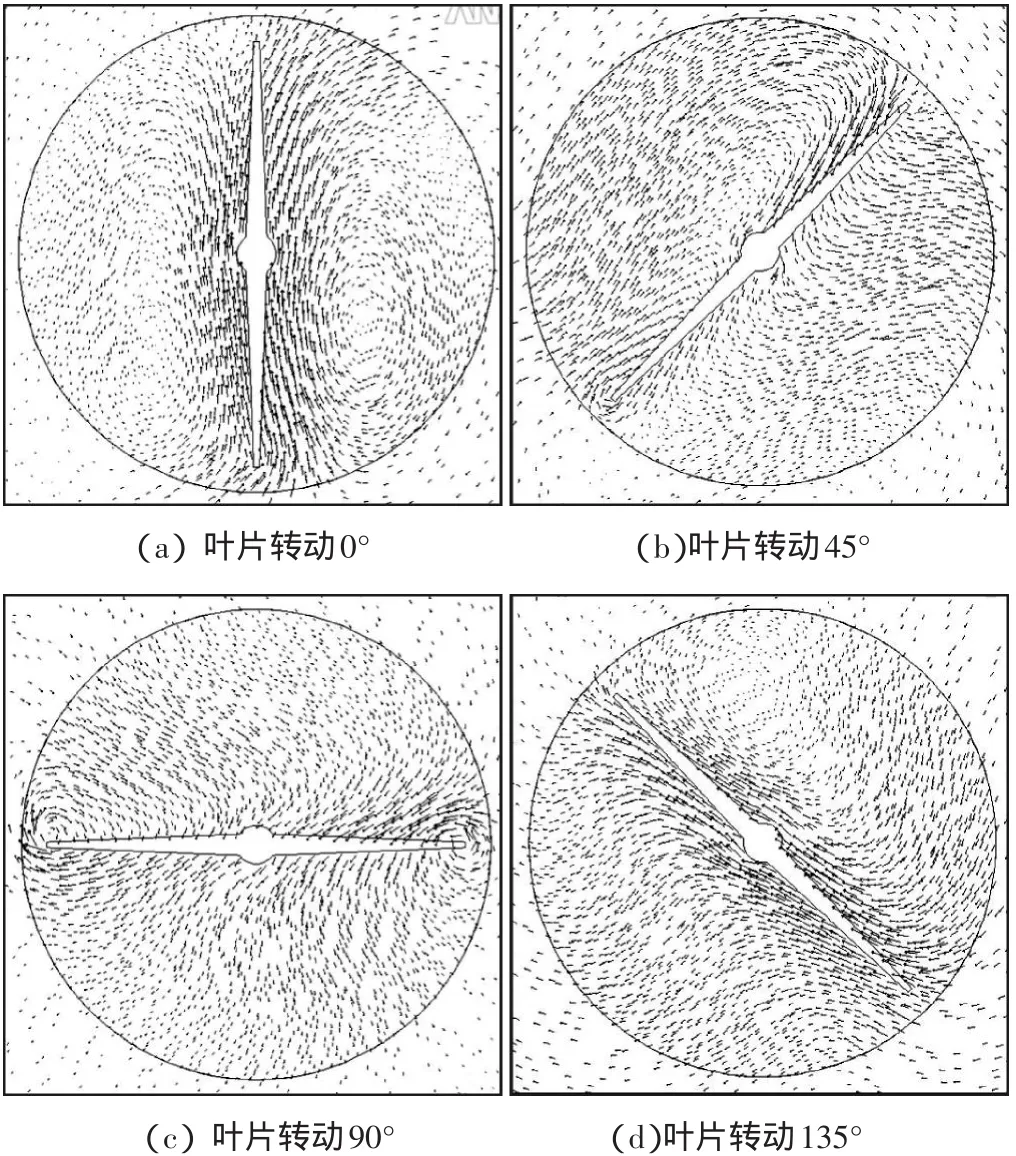
图3 不同叶片方位的流场速度矢量分布
由图3 可知,流场中沿叶片壁面分布的速度矢量与叶片公转和自转的合速度方向一致。0 °时叶片壁面两侧速度矢量均匀向上,外侧速度矢量较小且有分布不均;45 °时,在叶片边缘处出现少量的速度矢量涡旋现象;当叶片转到90 °时,在叶片两端边缘处,速度矢量存在较大涡旋现象,此时升力最大;135 °时,速度矢量沿叶片壁面斜向上,且分布较为均匀。叶片公转一周回到初始位置,在一个运动周期中,不同位置的叶片周围存在不同的流场速度矢量分布。
3.2 叶片周围的压力分布
机构Ⅰ中叶片在不同状态下的流场压力分布曲线如图4 所示。
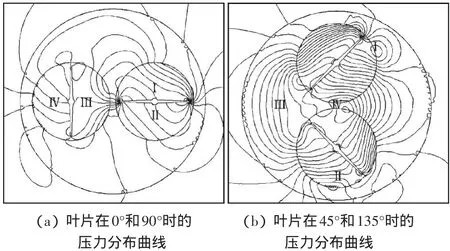
图4 叶片不同状态下流场压力分布曲线
叶片在0 °和90 °时的压力分布曲线如图4(a)所示,由图可知,水平叶片上部Ⅰ区域为负压,且叶片上表面压强值由叶片左端到右端递增;叶片下侧Ⅱ区域为正压,叶片下表面压强由叶片左侧到右侧也逐渐递增。垂直叶片两侧区域Ⅲ和区域Ⅳ上部为负压,下部为正压,叶片上部两侧压强差较小,而下部两侧的压强差较大。
叶片在45 °和135 °时的压力分布曲线如图4(b)所示,由图可知,Ⅰ区域、Ⅱ区域和Ⅲ区域均为正压。压力值在Ⅰ区域和Ⅱ区域较大,Ⅲ区域压力值较小,Ⅳ区域为负压。压力总体分布从叶片外侧边缘向两叶片中心处递减,上叶片下半部下表面压力分布几乎与下叶片下半部上表面的相同。因此,双叶片在运动中存在很强的相互影响。
3.3 不同机构参数对升力的影响
在类扑翼飞行器叶片转动过程中,叶片表面的分布压力可合成为定向升力或推力,根据流体动力学理论,其大小与升力系数CL成正比。当叶片的结构尺寸和转速相同时,升力系数CL的变化规律反映了叶片在不同位置时升力变化。
因此,本研究给定相同的转速,对3 种不同机构的叶片流场特性进行仿真计算,输出其中左侧叶片在转动一周的过程中升力系数变化曲线,3 种机构参数的升力系数曲线如图5 所示。
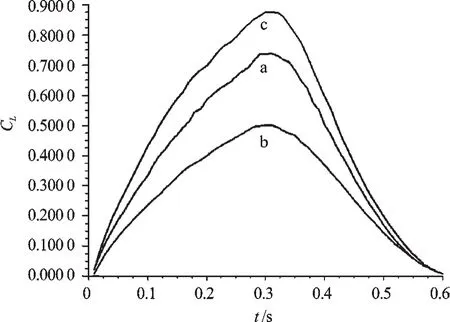
图5 3 种机构参数的升力系数曲线
对比图5 中3 种机构参数的叶片升力系数曲线可知,叶片在公转一周的过程中,升力最大值出现在0.3 s即叶片转动到水平位置,且前半周的升力系数明显大于后半周的。
机构Ⅰ的升力系数最大值为0.72,机构Ⅱ升力系数最大值为0.5,机构Ⅲ升力系数最大值为0.9。由图5中曲线a 和b 可知,相同中心距下增大叶片尺寸,显然通过增加迎流面积能够有效地增加升力。分析曲线a和c 可知,在叶片尺寸不变的情况下,适当增加两叶片中心距,显然增加叶片公转的线速度也能使升力系数得到显著增加。计算结果表明:适当地增加叶片尺寸和两叶片之间的中心距能够有效地提高推进器的升力,这与理论分析结果是一致的[11]。
4 结束语
本研究提出了一种新型类扑翼飞行器,其结构组成简单、主传动机构效率高、升力方向控制灵敏。基于FLUENT,笔者建立了双叶片运动的流场特性有限元模型,分析确定了计算区域、边界条件及计算模型,对3 种不同机构参数的叶片运动流场特性进行了仿真计算与分析,获得了叶片运动流场的速度矢量和叶片表面压力分布变化规律以及升力系数变化规律。
研究结果表明:在一个运动周期中双叶片周围的流场速度矢量、压力分布和升力系数是随叶片方位变化的,两个叶片之间存在很强的相互影响;前半周的叶片升力系数大于后半周的升力系数;通过增加叶片大小和两叶片的中心距可有效提高升力系数。
该研究对于指导修正类扑翼飞行器的升力计算数学模型具有重要的指导意义。
(References):
[1]MICHELSON R C,REECE S.Update on Flapping Wing Micro Air Vehicle Research on going Work to Develop a Flapping Wing,Crawling“Entomopter”[C].The 13th Bris⁃tol International RPV Conference,1998.
[2]PORNSIN-SIRIRAK T N,TAIY C,HO C M,etal.Micro⁃Bat:a Palm-sized Electrically Powered Ornithopter[C].The NASA/JPLWorkshop on Biomorphic Robotics,2000:14-16.
[3]曾 锐,昂海松.仿鸟复合振动的扑翼气动分析[J].南京航空航天大学学报,2003,35(1):6-12.
[4]邱 晗,王孝义.半转机构—一种运动仿生机构的构成及其基本运动特性[J].机械科学与技术,2011,30(4):600-604.
[5]张玉华,邱支振.半转机构的内凸轮啮合传动[J].机械传动,2008,32(3):1-3.
[6]高广林,宋笔锋,李占科.扑翼飞行器机翼平面形状设计方法研究[J].飞行力学,2009,27(5):37-39.
[7]徐媛媛,马炳和.基于CAN 总线的分布式翼面压力测量系统[J].机电工程,2012,29(8):902-906.
[8]马 艺,金有海,王振波.FLUENT 软件在液—液旋流器中的应用[J].过滤与分离,2008,18(2):42-45.
[9]陆书圣,沈润杰,何 闻,等.基于FLUENT 的离心加速度下气压场仿真研究[J].机电工程,2011,28(5):537-541.
[10]刘磊,宋天民,管建军.基于FLUENT 的管壳换热器壳程流场数值模拟与分析[J].轻工机械,2012,30(1)18-21.
[11]张玉华,邱支振.单叶片推进器及其运动特性[J].机械工程学报,2006,42(3):193-196.
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
大电机技术(2021年2期)2021-07-21
装备制造技术(2020年1期)2020-12-25
空间科学学报(2020年4期)2020-04-22
东华大学学报(自然科学版)(2018年1期)2018-06-29
电子制作(2018年2期)2018-04-18
海洋信息技术与应用(2017年2期)2017-06-21
北京航空航天大学学报(2016年3期)2016-02-27
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
小朋友·快乐手工(2015年5期)2015-06-06